

Пункт 10.
Подготовить имитационную модель системы автоматического управления. Выполнить моделирование процесса включения системы питания для заданных преподавателем величин коэффициентов Кр и Кд.
С
5
BLT 103
101
201
301
401
501
1101
1
BLT 103
2
BLT 135
3
BLT 133
4
BLT 133
6
BLT 135
601
11
BLT 089




801
7
BLT 133
8
BLT 089
9
BLT 014
10
BLT 015
601
701

х
1) BLT 103 – генератор кусочно-постоянного сигнала (Хуст)
2) BLT 135 – сумматор
3) BLT 133 – инерционное звено I-ого порядка (регулятор)
4) BLT 133 – инерционное звено I-ого порядка (исполнительный механизм)
5) BLT 103 – генератор кусочно-постоянного сигнала (Е0)
6) BLT 135 – сумматор
7) BLT 133 – инерционное звено I-ого порядка (нагрузка)
8) BLT 089 – пропорциональное звено (датчик)
9) BLT 014 – осциллограф
10) BLT 015 – табулятор
11) BLT 089 – пропорциональное звено (W=Wд)
Пункт 11.
Выбрать значения коэффициентов Кр и Кд из области устойчивости, которые в статическом режиме обеспечивают нулевую величину э.д.с. Ер регулируемого источника. По результатам эксперимента рассчитать статизм, перерегулирование и длительность переходного процесса для выбранных значений коэффициентов Кр и Кд. Рассчитать теоретические значения указанных показателей.
Коэффициенты датчика и регулятора выберем из области устойчивости таким образом, чтобы в установившемся режиме эти коэффициенты обеспечивали нулевую величину э.д.с. Ер регулируемого источника. Кр = 50, Кд = 0.1. Для того чтобы в установившемся режиме сумматор, стоящий перед регулятором, давал нулевой сигнал (Δх = 0), следовательно необходимо добавить пропорциональное звено с W=Wд
Е0
Е0
Wн
х
Wр
Wим
Хуст
Хуст
Δх
Хр
Ер
Wкор


–
Wд
Осциллограмма смоделированного процесса имеет вид:
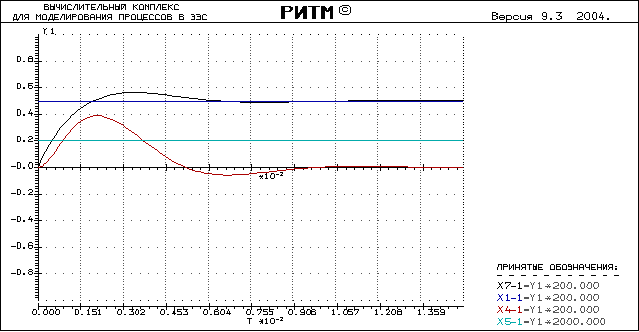
Расчет статизма, перерегулирования и длительности переходного процесса см. в п.12
Пункт 12.
Подготовить имитационную модель, позволяющую за один расчет выполнить:
— моделирование процесса включения системы питания с получением установившегося режима;
— моделирование последующего переходного процесса, обусловленного потерей 50% величины э.д.с. Е0 с получением нового установившегося режима.
В данной модели потеря 50 % величины э.д.с. Ео = 200 В.
С
5
BLT 103
501
1
BLT 103
2
BLT 135
3
BLT 133
4
BLT 133
6
BLT 135
1101
201
301
401
601
11
BLT 089
101
801
7
BLT 133
8
BLT 089
9
BLT 014
10
BLT 015
601
701
х
1) BLT 103 – генератор кусочно-постоянного сигнала (Хуст)
2) BLT 135 – сумматор
3) BLT 133 – инерционное звено I-ого порядка (регулятор)
4) BLT 133 – инерционное звено I-ого порядка (исполнительный механизм)
5) BLT 103 – генератор кусочно-постоянного сигнала (Е0)
6) BLT 135 – сумматор
7) BLT 133 – инерционное звено I-ого порядка (нагрузка)
8) BLT 089 – пропорциональное звено (датчик)
9) BLT 014 – осциллограф
10) BLT 015 – табулятор
11) BLT 089 – пропорциональное звено (W=Wд)
Осциллограмма смоделированного процесса:
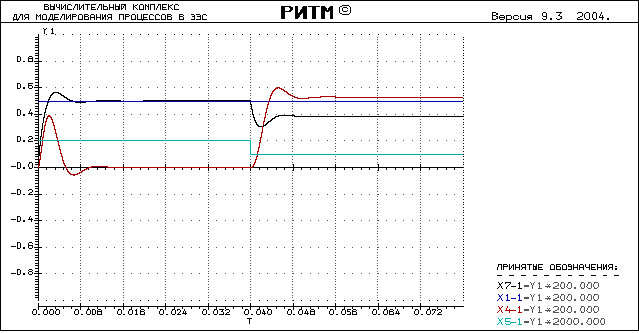
Экспериментальные данные:
1) Статизм:
![]() В
В
![]() А
А
![]() В
В
![]() А
А
![]() %
%
2) Перерегулирование:
![]()
![]()
![]() %
%
3) Длительность переходного процесса до аварии:
![]() сек
сек
Расчетные данные:
1) Статизм:
Для расчета величины статизма необходимо принять в выражении для эквивалентной передаточной функции р = 0: δ = Wэ(0)
![]()
2) Перерегулирование:
Характеристический полином равен:
![]()
![]() ,
,
![]() ,
,
![]() .
.
![]() ,
,
![]()
![]()
![]() %
%
3) Длительность переходного процесса:
постоянная времени
определяется как
![]()
длительность переходного
процесса
![]() сек
сек
Сравнение полученных теоретических и экспериментальных результатов:
для статизма:![]() %
%
для перерегулирования:
![]() %
%
для длительности
переходного процесса:
![]() %
%