

Контрольные вопросы и задания
7.1. Приведите определение понятия нелинейного преобразовательного элемента измерительной цепи оптического прибора.
7.2. Что показывает структурная схема ИЦ? Приведите пример. Определите понятия: вход и выход ПЭ, входной и выходной сигналы ПЭ, информативные параметры входного и выходного сигналов ПЭ, функция преобразования ПЭ, линии связи ПЭ.
7.3. Что показывает функциональная схема ИЦ? Приведите пример.
Какие параметры ИЦ называют схемными? Чем отличается функциональная ИЦ от ее структурной схемы?
7.4. Выведите теоретическую функцию преобразования для предложенного Вам НПЭ.
7.5. Почему график теоретической функции преобразования ИЦ с НПЭ, построенный в документе, изображается в виде прямой линии?
7.6. В чем заключается аналитический метод расчета теоретических погрешностей ИЦ ОП с НПЭ при помощи их точных функций преобразования.
7.7. Как влияет погрешность ввода числа "Pi" в расчет на точность функционирования ИЦ? Рассчитайте значение погрешности ИЦ от погрешности ввода числа "Pi".
7.8. Какое состояние теоретического (идеального) НПЭ принято принимать за начальное?
7.9. Как влияет рассогласование системы отсчета НПЭ с серединой диапазона функционирования ИЦ на ее теоретическую погрешность?
7.10. Как влияет на погрешности НПЭ расположение диапазона функционирования НПЭ относительно его начального состояния?
7.11. Рассчитайте погрешность ИЦ ЛУОСЛ при не равном 0 параметре согласования начала системы отсчета одного из НПЭ ИЦ ЛУОСЛ с серединой его диапазона функционирования.
7.12. Выведите выражение для частичной погрешности измерительной цепи ЛУОСЛ.
ЛИТЕРАТУРА
ГСИ. ГОСТ 16263-70. Метрология. Термины и определения. - 54 с.
Кулагин В.В. Основы конструирования оптических приборов. - Л.:
Машиностроение, 1982. -312 с. Стр. 96-112, 190-204, 289-307.
Латыев С.М. Конструирование точных (оптических) приборов. - С-Пб.:
ИТМО, 1996. -99 с. Стр. 94-98.
Латыев С.М., Егоров Г.В. Учебное пособие по выполнению курсового
проекта дисциплины "Конструирование оптических приборов". - Л.:
ЛИТМО, 1991. -74 с. Стр. 45-64.
Парвулюсов Ю.Б. и др. Проектирование оптико-электронных приборов.
-М.: Машиностроение, 1990. -432 с. Стр. 289-295.
Латыев С. М., Егоров Г. В., Тимощук И. Н. Проектирование оптико-электронных приборов и систем. Методические указания по выполнению лабораторных работ. – СПб.: СПб ГИТМО (ТУ), 2001. – 88 с. Стр. 5-12, 46-48, 81-86.
ПРИЛОЖЕНИЕ 1
Пример структурной схемы измерительной цепи ЛУОСЛ (схема 2-2)
[4, стр. 52].
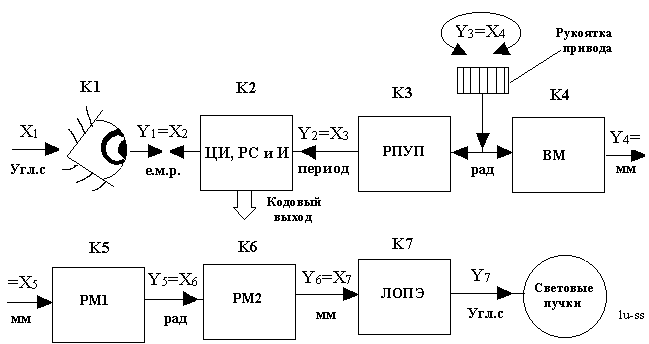
Рис. 1. Структурная схема измерительной цепи ЛУОСЛ,
здесь:
ЦИ, РС и И – цифровой индикатор, реверсивный счетчик; РПУП – растровой преобразователь угловых перемещений; ВМ – винтовой механизм; РМ1 – арксинусный рычажный механизм; РМ2 – синусный рычажный механизм; ЛОПЭ – линзовый отклоняющий преобразовательный элемент; Х1 – планируемая величина отклонения лучей; Y1 – устанавливаемый отсчет на цифровом индикаторе; Х2 - установленный отсчет на цифровом индикаторе;Y2 – число периодов сигнала, поступающего РПУП; Х3 - число периодов сигнала, выданного РПУП; Y3 – угловое перемещение вала РПУП; Х3 – угловое перемещение микровинта 6; Y4 – линейное перемещение винтовой гайки 7; Х5 - линейное перемещение винтовой гайки 7, выступающей в роли толкателя арксинусного рычажного механизма RM1; Y5 – угловое перемещение рычага 11 арксинусного рычажного механизма RM1; Х6 - угловое перемещение рычага 12 синусного рычажного механизма RM2; Y6 - линейное перемещение толкателя синусного рычажного механизма RM2; Х7 - линейное перемещение подвижной линзы 14 ЛОПЭ; Y7 – угловое отклонение световых лучей; К1, К2, ...,К7 – коэффициенты преобразования преобразовательных элементов измерительной цепи ЛУОСЛ
ПРИЛОЖЕНИЕ 2
Пример функциональной схемы измерительной цепи ЛУОСЛ (схема 2-2)
[4, стр. 53].
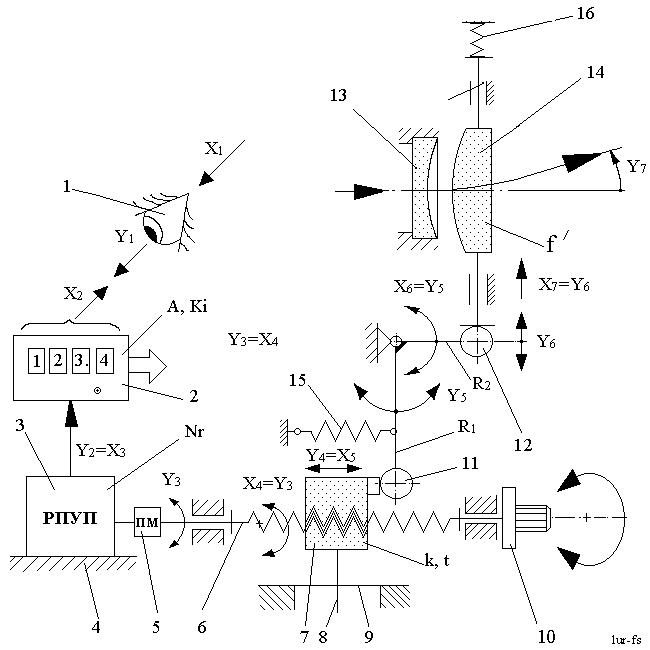
Рис. 2. Функциональная схема измерительной цепи ЛУОСЛ
здесь:
1 – оператор; 2 – цифровой индикатор (ЦИ), реверсивный счетчик (РС) и интерполятор (И); 3 – растровый преобразователь угловых перемещений; 4 – корпус устройства; 5 – поводковая муфта; 6 – микровинт; 7 – винтовая гайка; 8 – палец поводкового устройства; 9 – ограничительная планка поводкового устройства; 10 – рукоятка ручного привода; 11 – арксинусный рычаг R1; 12 – синусный рычаг R2; 13 и 14 – неподвижная и подвижная линзы линзового отклоняющего преобразовательного элемента; 15 и 16 – пружины для силового замыкания кинематических пар в рычажных и винтовом механизмах
ПРИЛОЖЕНИЕ 3