

3. Оптиметр проекционного типа икв-3
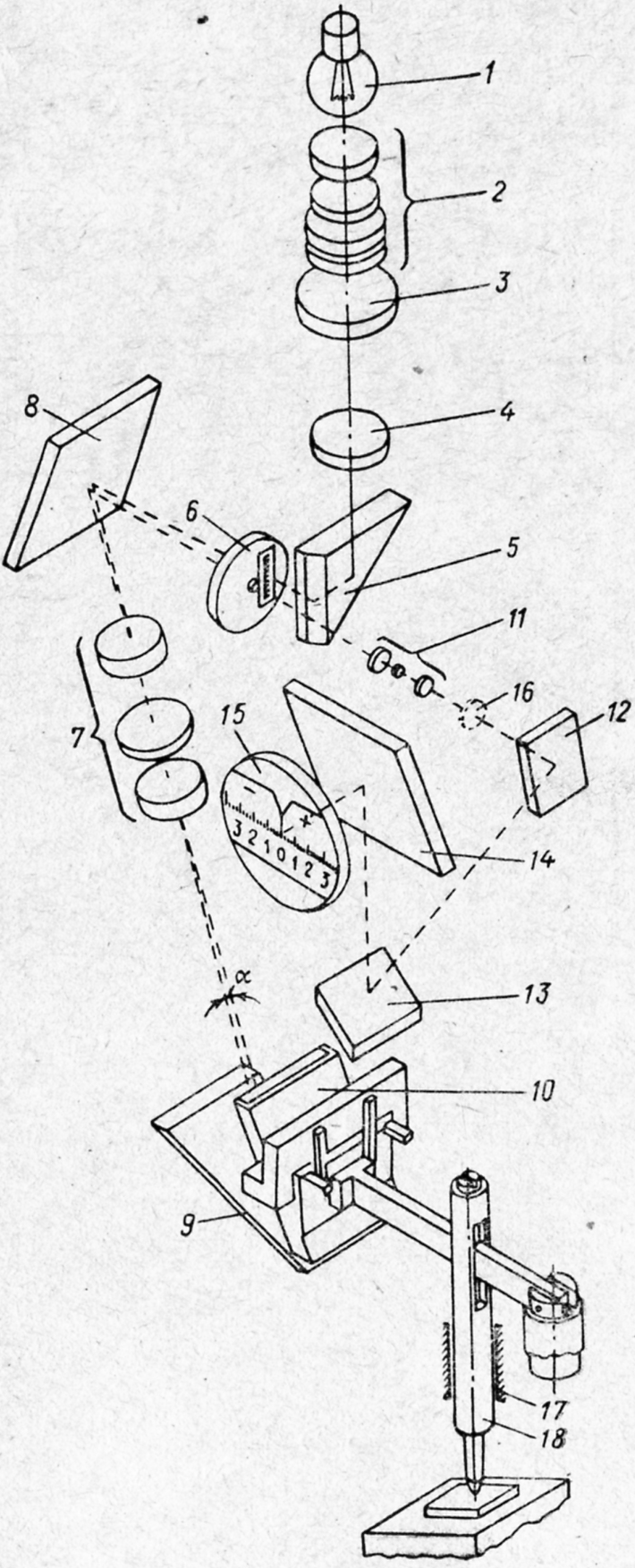
Рис. 7. Оптико-кинематическая схема оптиметра проекционного типа ИКВ-3,
1 – лампа накаливания; 2 – конденсор; 3 – теплофильтр; 4 – линза; 5 – призма; 6 – шкала на плоскопараллельной пластинке; 7 – объектив; 8 – плоское зеркало; 9 –неподвижное зеркало; 10 – качающееся зеркало; 11 – объектив; 12, 13 и 14 система зеркал; 15 – экран; 16 – дополнительная линза; 17 – направляющая; 18 - измерительный стержень
Из оптико-кинематической схемыоптиметра проекционного типа (рис. 7) видно, что структура его измерительной цепи состоит из следующих преобразовательных элементов:
- перемещающийся измерительный стержень;
- рычажный преобразователь;
- качающееся зеркало в паре с неподвижным (оптический умножитель);
- объектив, работающий с удалённым предметом;
- линейное шкальное отсчётное устройство.
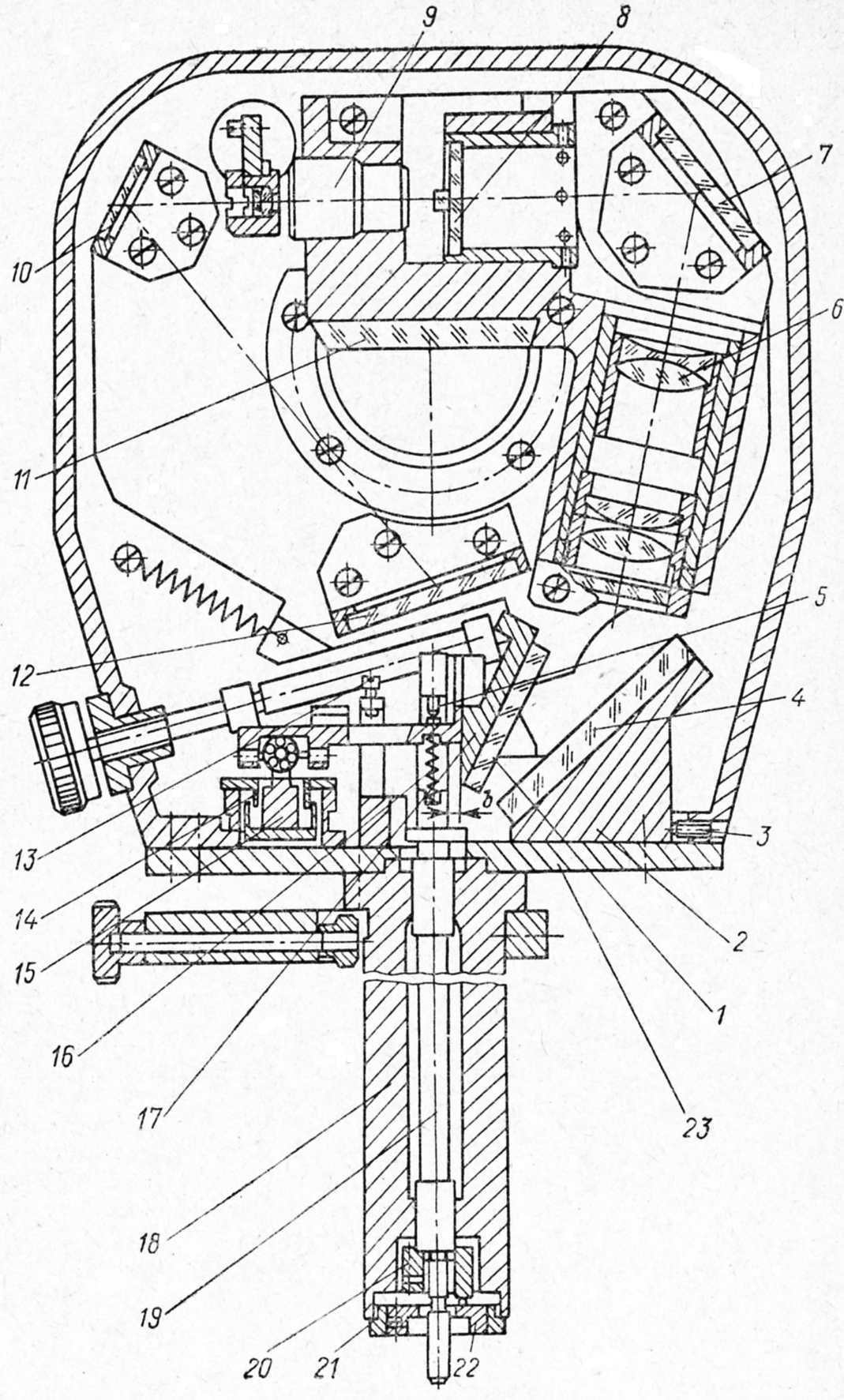
Рис. 8. Конструкция головки проекционного оптиметра ИКВ-3,
1 – качающееся зеркало; 4 – неподвижное зеркало; 6 - автоколлимационный
объектив; 7 - компоновочное зеркало; 8 –шкала оптиметра; 9 – проекционный объектив; 19 – измерительный стержень
Вопросы,изучаемые при выполнении раздела 3
Изучив оптико-кинематическую схему оптиметра проекционного типа ИКВ-3 (рис. 7) и его конструкцию (рис. 8), составьте структурную схему измерительной цепи оптиметра проекционного типа.
Выберите или экспериментально определите схемные параметры для этой цепи и рассчитайте коэффициенты преобразования.
Какие оптические элементы оптиметра используются для компоновки конструкции оптиметра (рис. 8)?
Сделайте эскиз «оптической схемы» для оптиметра проекционного типа без компоновочных элементов и с упрощенным изображением её линзовых элементов.
Изучите структурную схему измерительной цепи оптиметра проекционного типа.
Изучите преобразовательные элементы входящие измерительную цепь оптиметра проекционного типа.
Составьте функциональную измерительную цепь схема оптиметра проекционного типа.
Является ли проекционный объектив измерительным преобразователем измерительной цепи оптиметрапроекционного типа.
Какие погрешности влияют на точность измерения оптиметрапроекционного типа?
Для предложенной преподавателем первичной погрешности найдите аналитическое выражение частичной погрешности от неё и постройте график.
Цифровой оптиметр итмо
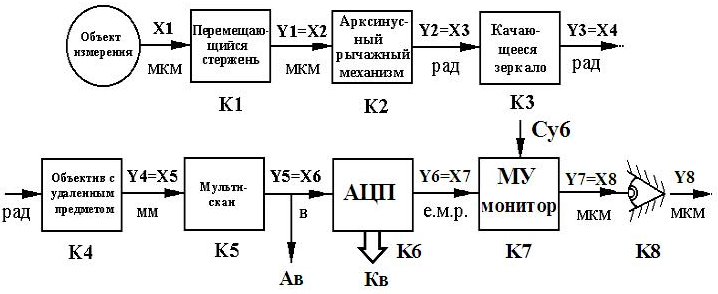
Рис. 9. Структурная схема измерительной цепи цифрового оптиметра ИТМО,
ЛШОУ – линейное шкальное отсчётное устройство; АЦП – аналоговоцифровой преобразователь; МУ – множительное устройство;
Су6 – цена единицы младшего разряда (е.м.р.); К1,К2, …. – коэффициенты преобразования преобразовательных элементов; Ав – аналоговый выход; Кв – кодовый выход; Х1, Y1,… - информативные параметры входных и выходных сигналов
Первичные погрешности макета цифрового оптиметра
ΔK1′7 - общая погрешность выбора схемных параметров измерительной
цепи цифрового оптиметра, б.р.в.
Δpis- погрешность перпендикулярности измерительного стержня
измеряемому размеру, рад
ΔX2n- погрешность согласования начального состояния АСРП, мкм
Δr- погрешность длины рычага АСРП, мм
Δy2L - погрешность от линеаризации функции преобразования АСРП, рад
ΔX3nr- погрешность согласования начального состояния ОУП, рад
ΔX3ng=180/π·ΔX3nr
ΔX3ng - погрешность согласования начального состояния ОУП, град
Δf- погрешность фокусного расстояния ОУП, мм
Δsf- погрешность фокусировки ОУП, мм
Δy4L- погрешность от линеаризации функции преобразования ОУП, мм
Δy4d% - дисторсия ОУП, %
ΔU- погрешность опорного напряжения МС, в
ΔL- погрешность рабочей длины МС, мм
Δ5L% - погрешность линейности МС, %
ΔCmv- погрешность центрировкивдоль мультискана, мм
ΔCmp- погрешность поперечной центрировки мультискана, мм
Δy6kv - погрешность от квантования информации АЦП, е.м.р.
ΔCy6v - погрешность вводимой цены единицы младшего разряда (е.м.р.) оптиметра, мкм