

§ 4.3. Автоматические регуляторы частоты
ВРАЩЕНИЯ
Регуляторы с жесткой обратной связью (см. рис. 4.1). Жесткой кинематической обратной связью в механизме регулятора непрямого действия является рычаг 11у связывающий движение муфты 9, золотника 13 и поршня 12 серводвигателя (см. рис. 4.1, а).
При увеличении угловой скорости вала двигателя муфта 9 перемещается вверх и поворачивает рычаг 11 по часовой стрелке относительно пока неподвижной точки А. Это вызывает смещение золотника 13 вверх, отчего масло под высоким давлением попадает в верхнюю полость цилиндра серводвигателя. Одновременно с этим нижняя полость соединяется со сливной системой. Поршень 12 (шток 14 и точка А) перемещается вниз (в сторону выключения подачи топлива), поворачивая рычаг И относительно точки С по часовой стрелке до тех пор, пока золотник 13 не перекроет маслопроводы и не остановит поршень 12 серводвигателя.
Регуляторы такого типа имеют статическую характеристику работы (см. рис. 3.20, б, в). Действительно, каждому нагрузочному режиму двигателя соответствует своя подача топлива, т. е. свое положение рейки топливного насоса и, следовательно, точки А (см. рис. 4.1). Точка В рычага 11, связанная с золотником 13, при любом равновесном режиме занимает одно и то же положение, в связи с чем при различных положениях точки А точка С рычага 11 должна занимать также разные положения, а это может быть только при различных скоростных режимах двигателя.
Эффект жесткой обратной связи можно получить воздействием в процессе работы на предварительную деформацию пружины регулятора (см. рис. 4.1, б). При увеличении угловой скорости грузов 8 пружина 7 деформируется, а золотник 13, выполненный
за одно целое с муфтой 9> перемещается вверх, вызывая перемещение поршня 12 серводвигателя вниз. Рычаг 11 жесткой обратной связи поворачивается по часовой стрелке относительно точки С, перемещает опору 6 и, увеличивая предварительную деформацию пружины 7, возвращает грузы 5 при новой угловой скорости в прежнее положение. Золотник 13 при этом перекрывает доступ маслу. Процесс регулирования на этом может прекратиться. Такую обратную связь обычно называют жесткой силовой.
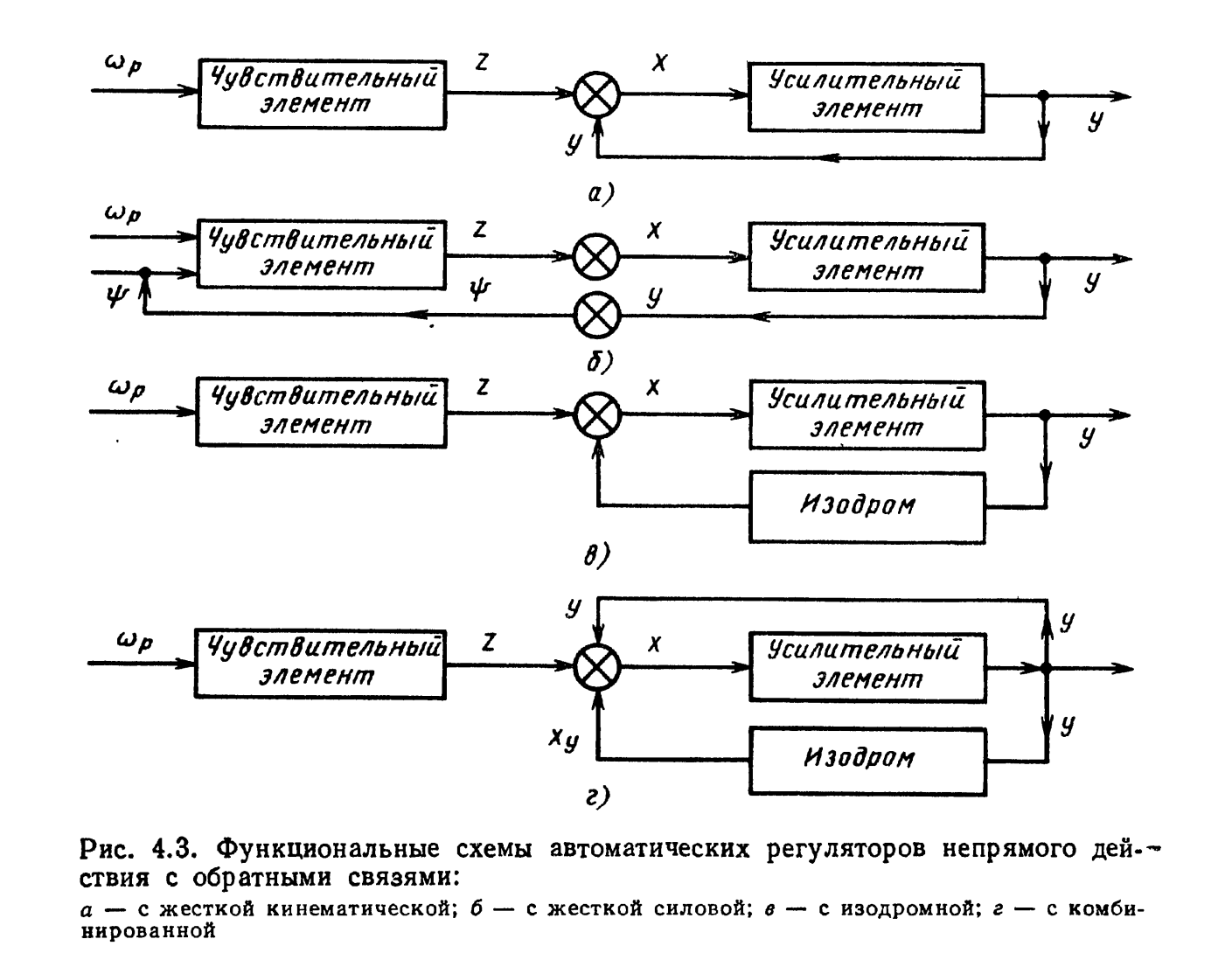
В регуляторе с жесткой силовой обратной связью при всех установившихся скоростных режимах муфта чувствительного элемента занимает одно и то же положение, поэтому диапазоны перемещения грузов в процессе регулирования здесь меньше, чем в регуляторе на рис. 4.1, а, что является определенным преимуществом силовой обратной связи. Жесткая кинематическая обратная связь на функциональной схеме (рис. 4.3, а) изображается стрелкой, указывающей на то, что перемещение золотника х определяется не только перемещением г муфты, но и перемещением у поршня серводвигателя. Жесткая силовая обратная связь (рис. 4.3, 6) создает воздействие у непосредственно на настройку г|? чувствительного элемента.
Регуляторы с гибкой обратной связью (изодромные). В тех случаях,
тор (рис. 4.4) должен обеспечить строгое постоянство скоростного режима двигателя (АС на рис. 2.3), используется гибкая обратная связь, называемая обычно изодромной..
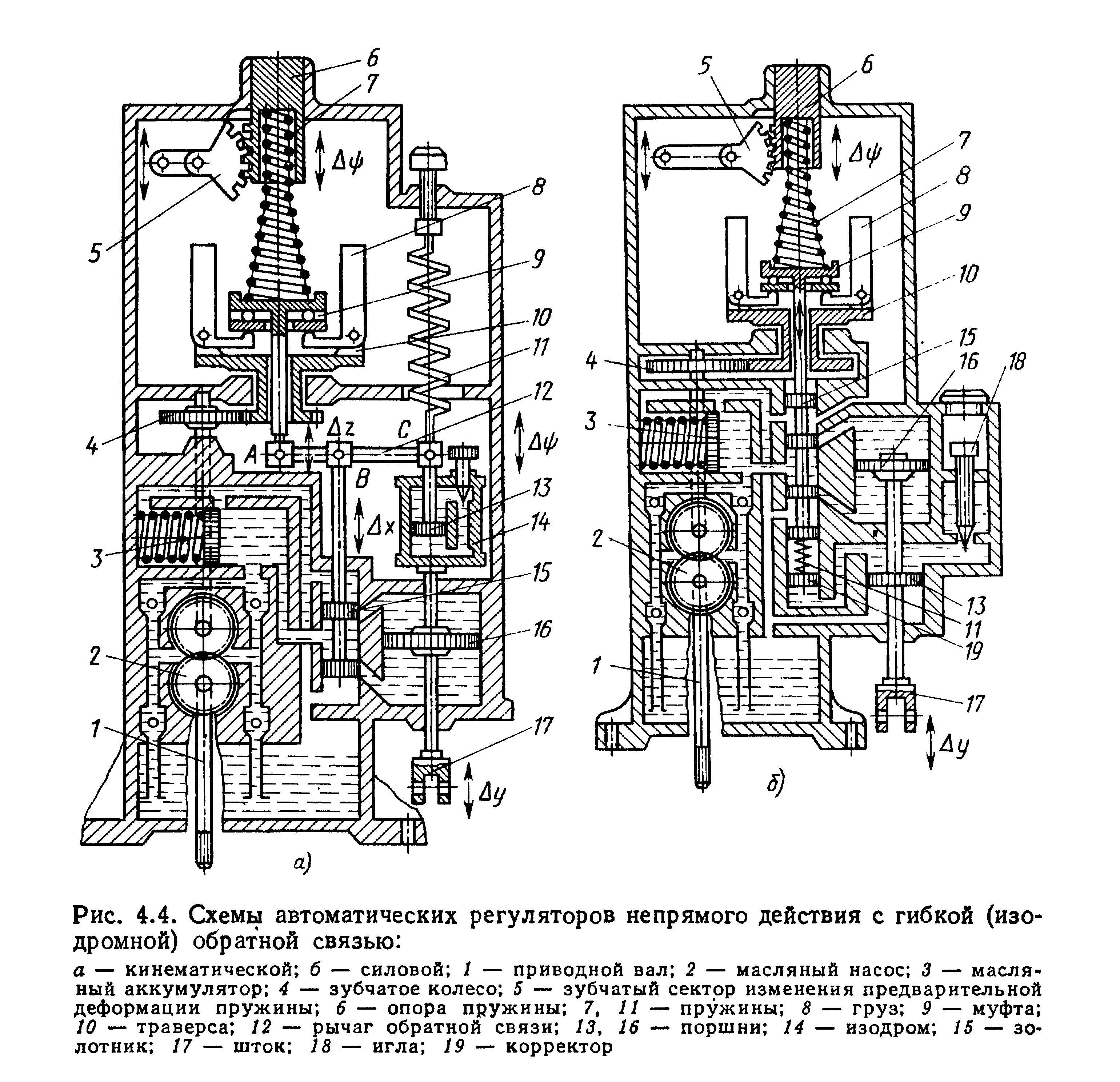
В систему изодромной кинематической обратной связи вводится упругое звено — пружина 11 (рис. 4.4, а), связанная с одной стороны с неподвижным упором, с другой — с поршнем 13 изодрома 14. Изодром, выполненный в виде катаракта, обеспечивает сопротивление, пропорциональное скорости движения поршня 13 в своем цилиндре. Цилиндр жестко связан с поршнем 16 серводвигателя. Рычаг 12 обратной связи соединяет муфту 9 регулятора, шток золотника 15 и шток поршня 13.
В зависимости от заданной нагрузки поршень 16 и шток 17, связанный с рейкой, при установившихся режимах занимают различные положения, в то время как по завершению переходного процесса точка С пружиной 11 всегда возвращается в свое исход-
ное положение. Так как точка В рычага 12 на всех установившихся режимах также всегда занимает одно и то же положение, то и точка Л, связанная с муфтой 9 чувствительного элемента, должна при всех установившихся режимах занимать одно и то же положение, что при постоянстве положения опоры 6 может быть только при одной и той же заданной (опорой б) угловой скорости. Следствием такой работы регулятора являются регуляторная характеристика 3 на рис. 2.3.
Во многих изодромных регуляторах используют гибкие силовые обратные связи. Такой регулятор (рис. 4.4, б) имеет поршень 13 изодрома и корректор 19, а также дросселирующую иглу 18. При увеличении угловой скорости грузов 5 муфта 9 и золотник 15 переместятся вверх, вследствие чего масло под высоким давлением из масляного аккумулятора 3 поступит в верхнюю полость серводвигателя. Нижняя полость окажется при этом соединенной со сливной магистралью, и поршень 16 начнет перемещаться вниз. С ним жестко связан поршень 13 изодрома, при перемещении которого вниз создается разрежение в полости под корректором 19. Пружина 11 растягивается и создает усилие, возвращающее золотник в исходное положение. Новый равновесный режим при новом положении поршня 16 (при новой нагрузке) может установиться только при возвращении золотника 15 в исходное положение, когда маслопроводы, подводящие масло к серводвигателю, перекрыты. При этом пружина корректора 19 оказывается не нагруженной, так как масло из масляной ванны регулятора может подсасываться в полость под корректором 19 через канал, за- дросселированный иглой 18, или, наоборот, при избыточном давлении (когда поршень 13 перемещается вверх) может перепускаться в масляную ванну.
Функциональная схема изодромного регулятора показана на рис. 4.3, в.
Регуляторы с комбинированной обратной связью. Двигатели внутреннего сгорания во многих случаях включаются в параллельную работу (см. рис. 2.30). Экономичность работы подобной силовой установки повышается, если, например, суммарная нагрузка одинаковых двигателей 1 я 2 (см. рис. 2.30, а) в известном диапазоне ее изменения распределяется между ними равномерно. Для этого необходимо, чтобы регуляторные характеристики двигателей имели определенный статизм (6 > 0) и по возможности точно совпадали на всех режимах. В связи с этим от чисто изодромных регуляторов приходится отказываться и вводить в их конструкцию приспособления, обеспечивающие статизм регуляторной характеристики при малой, так называемой остаточной неравномерности работы. С этой целью в конструкцию изодромного регулятора дополнительно вводят жесткую обратную связь, кинематическую (рис. 4.5, а) или силовую (рис. 4.5, б).
Функцию жесткой кинематической обратной связи выполняет рычаг 11 (см. рис. 4.5, а), изменяющий положение точки Н пружины

изодрома в зависимости от нагрузки двигателя. В равновесных режимах точка С при различных положениях точки Н также занимает различные положения. Точка В в равновесном режиме всегда занимает одно и то же положение, поэтому и точка А рычага 14, связанная с муфтой, должна занимать положения, соответствующие различным положениям точки С и, следовательно, различным значениям угловой скорости грузов 6. Это и обеспечивает определенный статизм регуляторной характеристики. Эффект воздействия жесткой обратной связи, т. е. наклоны регуляторных характеристик, может быть изменен путем изменения соотношения плеч с и д, рычага 11. При с = 0 регулятор становится чисто изодромным и, наоборот, при с — й действие гибкой обратной связи прекращается, и регулятор получает лишь одну жесткую обратную связь.
Силовыми обратными связями оборудован регулятор, схема которого показана на рис. 4.5, б. Функциональная схема автоматического регулятора непрямого действия с комбинированной обратной связью приведена на рис. 4.3, г.