

§ 6.4. Электрические регуляторы частоты
ВРАЩЕНИЯ С ЭЛЕКТРОННЫМИ БЛОКАМИ УПРАВЛЕНИЯ
Датчиком частоты вращения в регуляторе, принципиальная схема которого приведена на рис. 6.5, является тахогене- ратор 1 с постоянным магнитом. В качестве исполнительного элемента использован электромагнит 3 пропорционального действия. Значения входных координат, которые поступают на электронный блок, управления 5, в процессе работы синтезируются, в результате чего вырабатывается сигнал управления, воспринимаемый электромагнитом 3.
Так, например, при сбросе нагрузки и увеличении угловой скорости со ротора тахогенератор 1 подает сигнал в электронный
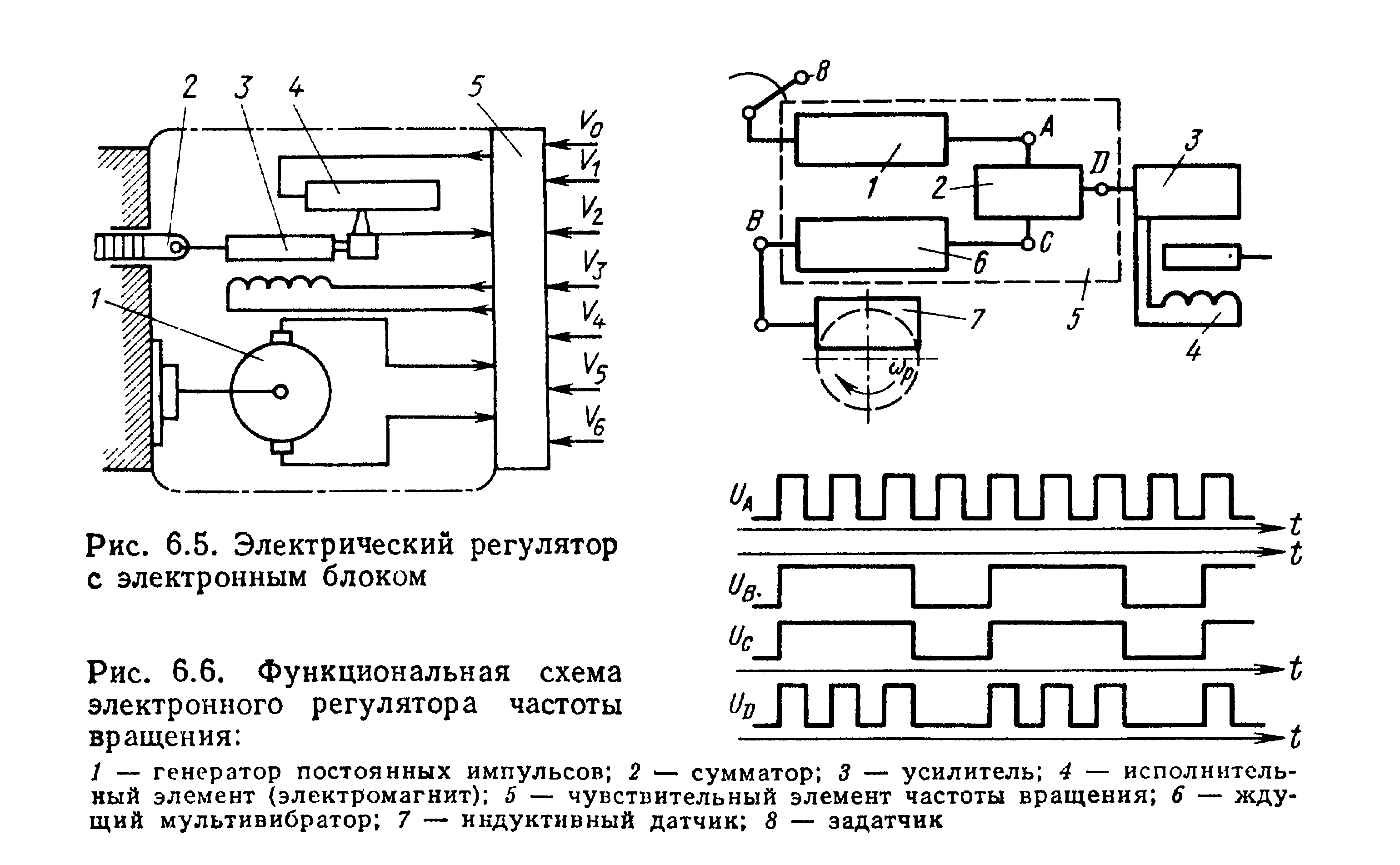
блок 5, который воспринимает также сигналы потенциометра 4, характеризующие положение рейки 2 и, следовательно, цикловую подачу топлива. Этот потенциометр выполняет функцию жесткой электрической обратной связи. Сигналы з электронном блоке синтезируются с сигналами: У0 — задатчика скоростного режима (при всережимном регуляторе), обеспечивающего выбор регуляторной характеристики; — задатчика статизма (наклона) регуляторных характеристик; У3 — задатчика коррекции цикловой подачи топлива по давлению наддува. На этот же блок могут поступать сигналы от датчиков давления и температуры окружающей среды, теплового состояния двигателя и др.
В качестве датчиков в регуляторах могут использоваться также различные электронные устройства. На рис. 6.6 показана функциональная схема одного из таких устройств, предназначенного для измерения частоты вращения. Устройство состоит из генератора вырабатывающего постоянные положительные импульсы иА, поступающие на вход сумматора 2. На второй вход сумматора подаются выходные импульсы ждущего мультивибратора 6, сформированные-в результате взаимодействия его с индуктивным датчиком 7 частоты вращения коленчатого вала. Датчик вырабатывает отрицательные импульсы ив, число которых определяется частотой вращения коленчатого вала. В самом мультивибраторе 6 формируются положительные импульсы ис, причем число импульсов ив индуктивного датчика 7 определяет ширину выходного положительного импульса ис. Чем больше импульсов ив датчика (чем больше частота вращения коленчатого вала), тем уже выходной импульс мультивибратора. В результате синтеза импуль-
сов иА к ис в сумматоре 2 ликвидируется часть импульсов иА генератора 1 на интервалах между импульсами ис мультивибратора 6 и образуются импульсы ив.
Усилитель 3 постоянного тока увеличивает силу среднего тока, создаваемого импульсами ив до уровня, необходимого для исполнительного механизма 4.
При установившемся скоростном режиме двигателя частота импульсов, поступающих на вход усилителя, обеспечивает определенную силу среднего тока на выходе усилителя 3 и соответственно в обмотке электромагнита 4, что в свою очередь определяет положение якоря и рейки топливного насоса, т. е. цикловую подачу топлива. Если нагрузка на двигатель возрастает и вследствие этого уменьшается частота вращения коленчатого вала, то уменьшается число отрицательных импульсов ив индуктивного датчика 7, что приводит к увеличению ширины выходного положительного импульса ис мультивибратора 6 и, как следствие, пропуску сумматором 2 большего числа импульсов ил генератора 1 в виде импульсов ив. В связи с этим сила среднего тока на выходе усилителя 3 возрастает, что воспринимается исполнительным механизмом 4. Якорь электромагнита с рейкой топливного насоса высокого давления перемещается в сторону увеличения цикловой подачи топлива, и значение частоты вращения коленчатого вала восстанавливается.
Как уже отмечалось, цикловая подача топлива может корректироваться в зависимости от ряда факторов, определяющих состояние двигателя, его рабочих тел и окружающей среды. Для этого в схему регулятора кроме основного датчика регулируемого параметра (частоты вращения коленчатого вала) включается ряд других датчиков (см. рис. 6.1).
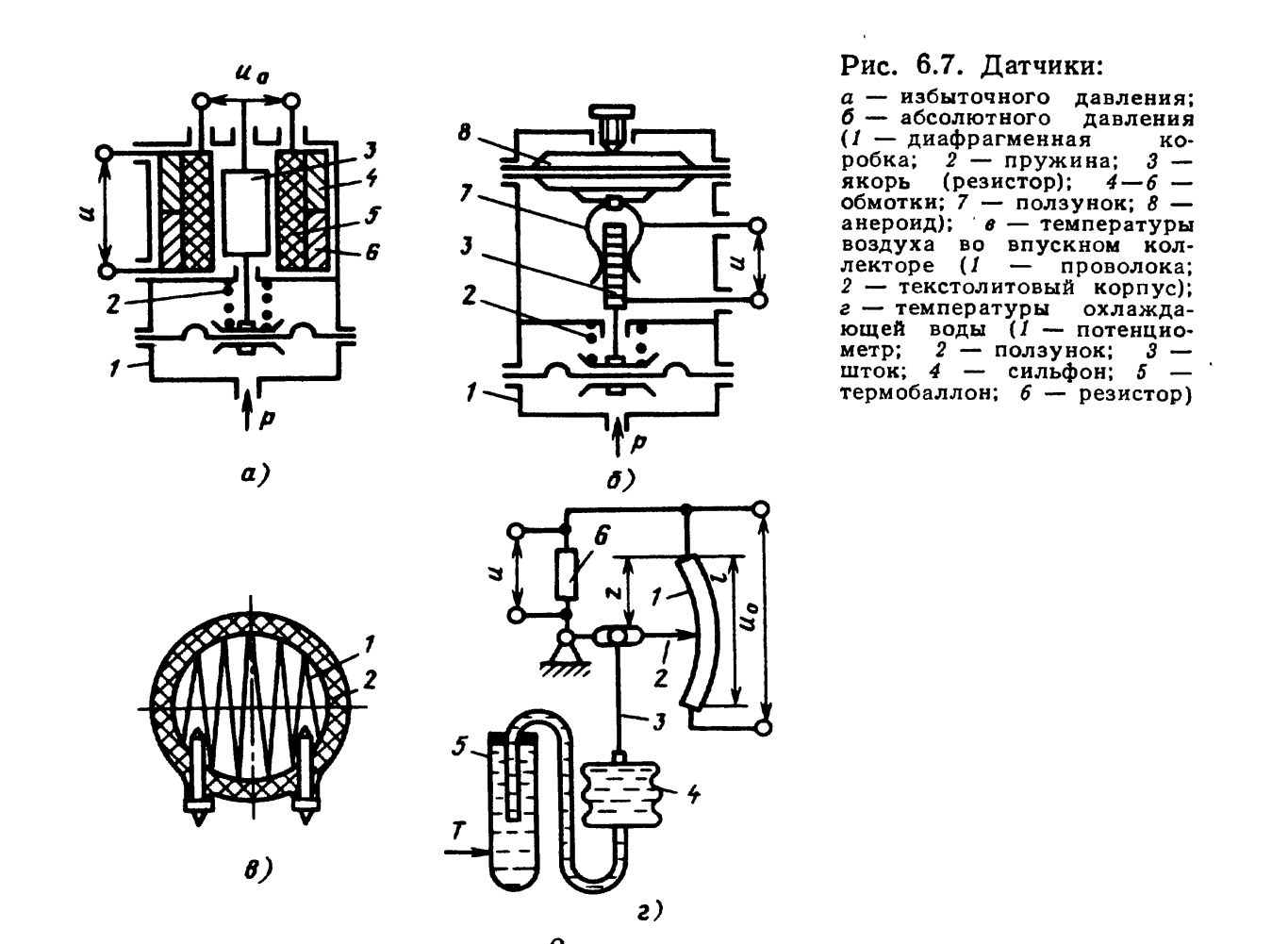
Датчик давления (рис. 6.7, а) представляет собой коробку 1 с диафрагмой, воспринимающей давление р. Диафрагма связана с якорем 3 электромагнита, катушка которого состоит из трех обмоток. Первичная обмотка 5, занимающая всю длину электромагнита, воспринимает входное напряжение и0, создаваемое источником постоянного тока. Вторичные обмотки 4 и 6 намотаны так, что при нейтральном (среднем) положении сердечника выходное напряжение и = 0. Отклонение сердечника от этого положения вызывает появление напряжения и на выходе такого, что изменение движения приводит к изменению фазы напряжения на 180°. Связь между перемещением сердечника и напряжением и в рабочем диапазоне может быть принята линейной, т. е. и = = киг, где ки — коэффициент пропорциональности.
Положение г сердечника зависит от давления и определяется уравнением
Ид/др = Е0 + Ъг,,
где ц,д/д — эффективная площадь диафрагмы; Е0 — усилие предварительной деформации пружины; Ь — жесткость пружины. Следовательно,
2 = (ЫпР — Ео)1Ь
ИЛИ
и = ки (|*д/др — Е0)/Ь.
Таким образом, зависимость и = / (р) в данном случае может быть принята линейной:
и = кр — к0, (6.11)
где к = Ли|Лд/д/& и к0 = киЕ^/Ь.
Некоторые датчики давления обеспечивают коррекцию выходного сигнала также в зависимости от атмосферного давления воздуха. Для этого в их конструкцию включается анероидная коробка 5, связанная ползунком 7 с резистором 3 (рис. 6.7, б).
Коррекция цикловой подачи топлива по давлению воздуха во впускном коллекторе обеспечивается подключением датчика давления к одному из настраиваемых резисторов генератора 1 (см. рис. 6.6). Изменение сопротивления такого резистора при изменении давления автоматически изменяет частоту импульсов иА генератора и, следовательно, силу среднего тока в обмотке электромагнита 4,.что влечет за собой соответствующее изменение цикловой подачи топлива.
Для измерения температуры воздуха во впускном коллекторе можно использовать датчик (рис. 6.7, в), изготовленный из тонкой проволоки 1 с высоким удельным сопротивлением, намотанной на миниатюрные крючки, укрепленные в текстолитовом корпусе 2. По мере возрастания температуры воздуха сопротивление датчика увеличивается линейно. Это сопротивление можно также связать с одним из резисторов, например, мультивибратора 6 (см. рис. 6.6). При возрастании температуры воздуха в выпускном коллекторе, т. е. при снижении его плотности и, следовательно, массы воздуха, подаваемого в цилиндры двигателя, сопротивление резистора увеличивается, что приводит к уменьшению ширины положительных импульсов ис мультивибратора, уменьшению числа импульсов иВл пропускаемых сумматором 2 от генератора 7, снижению силы среднего тока на выходе из усилителя 3 и смещению рейки топливного насоса в сторону уменьшения цикловой подачи топлива.
Датчик, приведенный на рис. 6.7, г, может быть использован для измерения температуры охлаждающей воды на выходе из головки двигателя, т. е. теплового состояния двигателя. При изменении температуры ползунок 2 изменяет выходное сопротивление потенциометра /, которое может быть связано, например, с резистором генератора 1 (см. рис. 6.6), что обеспечит коррекцию числа вырабатываемых им импульсов и соответствующую коррекцию цикловой подачи топлива.
Аналогично может быть осуществлена коррекция цикловой подачи топлива по температуре топлива (и, следовательно, по его плотности), если датчик температуры вмонтировать в головку топливного насоса высокого давления.
Приведенные выше примеры включения датчиков в схему электронного регулятора свидетельствуют о широких возможностях таких регуляторов формировать цикловую подачу топлива с учетом многих параметров, характеризующих состояние самого двигателя, рабочих тел (топлива, воздуха) и окружающей среды.
Появление интегральных микросхем существенно расширило возможности использования электроники в системах автоматического управления объектами и, в частности, двигателями внутреннего сгорания.
Микропроцессор, дополненный запоминающими устройствами и устройствами ввода-вывода, образует микроЭВМ, которая обеспечивает возможность целевого программирования процедур обработки данных, получаемых от датчиков и задатчиков, и формирования соответствующих управляющих воздействий, воспринимаемых исполнительным устройством. Знание результатов комплексного воздействия совокупности многих параметров рабочих тел, окружающей среды и режимов работы самого двигателя на качество работы двигателя создает условия для разработки соответствующих программ для мини-ЭВМ. оптимизации управляющих воздействий в целях, например, обеспечения минимального

расхода топлива на каждом режиме, что трудно реализовать с помощью автоматических регуляторов, работающих на механической, гидравлической или пневматической основе.
Микропроцессорный регулятор строится на базе микроЭВМ и поэтому может обрабатывать сигналы датчиков только в дискретной форме. Эта часть САР обычно называется дискретной (ДЧ на рис. 6.8). Сам двигатель ДВС, исполнительное устройство И У, датчики (Лр; Дф; Дх и др.) различных параметров двигателя имеют непрерывные аналоговые характеристики и в своей совокупности составляют непрерывную часть (НЧ) электронной САР.
Для передачи сигналов из НЧ в ДЧ и обратно эти сигналы должны соответствующим образом преобразовываться. С этой целью в структуру регулятора включаются аналого-цифровой преобразователь АЦП, преобразующий аналоговый сигнал (рис. 6.9, а) в дискретный (рис. 6.9, б, в), и цифроаналоговый преобразователь ЦАП, преобразующий дискретный сигнал в аналоговый.
В АЦП непрерывный сигнал подвергается квантованию по времени с шагом Д/, т. е. сигнал получает определенные значения только в моменты времени О, А^^ 2Д^, ..., пА1у ... Таким образом, непрерывный сигнал, например УФ (/) (см. рис. 6.9, а), преобразуется в дискретный ф* (<) или в общем случае х* (() (см. рис. 6.9, б). Одновременно происходит квантование сигнала по уровню путем округления дискретного сигнала ср* (0 до ближайшего стандартного уровня ф* (() (см. рис. 6.9, в). Полученный таким образом сигнал х* (() представляет собой последовательность цифровых двоичных кодов, которые в дискретные моменты времени передаются в процессор МкП (см. рис. 6.8). Сопоставлением данного сигнала х* (/) с сигналом (0, поступающим от задатчика программы ЗП (в данном случае — дискретного), микроЭВМ вырабатывает дискретный сигнал погрешности, на основании которого в каждый тактовый момент времени (О, Д^, 2Д^, .... лД/, ...) в соответствии с выбранным законом регулирования вычисляется дискретный регулирующий сигнал г* (2). Если же задатчик программы выдает сигнал в аналоговой форме, то перед входом в процессор этот сигнал следует преобразовать в дополнительном АЦП.

В процессе вычисления процессор может выполнять операции сложения, умножения, деления и другие, способные привести к переполнению разрядной сетки ЭВМ. Полученный в результате расчета дискретный сигнал г* вновь подвергается округлению до ближайшего стандартного значения (рис. 6.9, г) и затем в дискретные (тактовые) моменты времени передается в ЦАП. Если число разрядов микропроцессора составляет, например, 5, а число разрядов ЦАП составляет 4, то в ЦАП вновь производится округление (рис. 6.9, д), после чего сигнал поступает на экстрапо- лятор, превращающий цифровой код в кусочно-линейный сигнал.
В большинстве микроЭВМ используются экстраполяторы нулевого порядка, называемые фиксаторами. Они превращают цифровой сигнал в аналоговый ступенчатый г (0 (рис. 6.9, е), который и поступает на исполнительное устройство, т. е. в непрерывную часть системы.
При компоновке электронного регулятора кроме квантования сигнала по времени следует установить квантование сигнала по уровню и выбрать число разрядов микропроцессора. Необходимость квантования сигналов по времени и уровню превращает электронный регулятор в существенно нелинейный элемент САР. Нелинейная зависимость, связывающая непрерывный сигнал х и его квантованный аналог х, показана на рис. 6Л 0, а (шаг квантования <?).
Такое квантование приводит к появлению определенной по» грешности ед в передаче сигнала (рис. 6.10, б) по уровню. С уче-
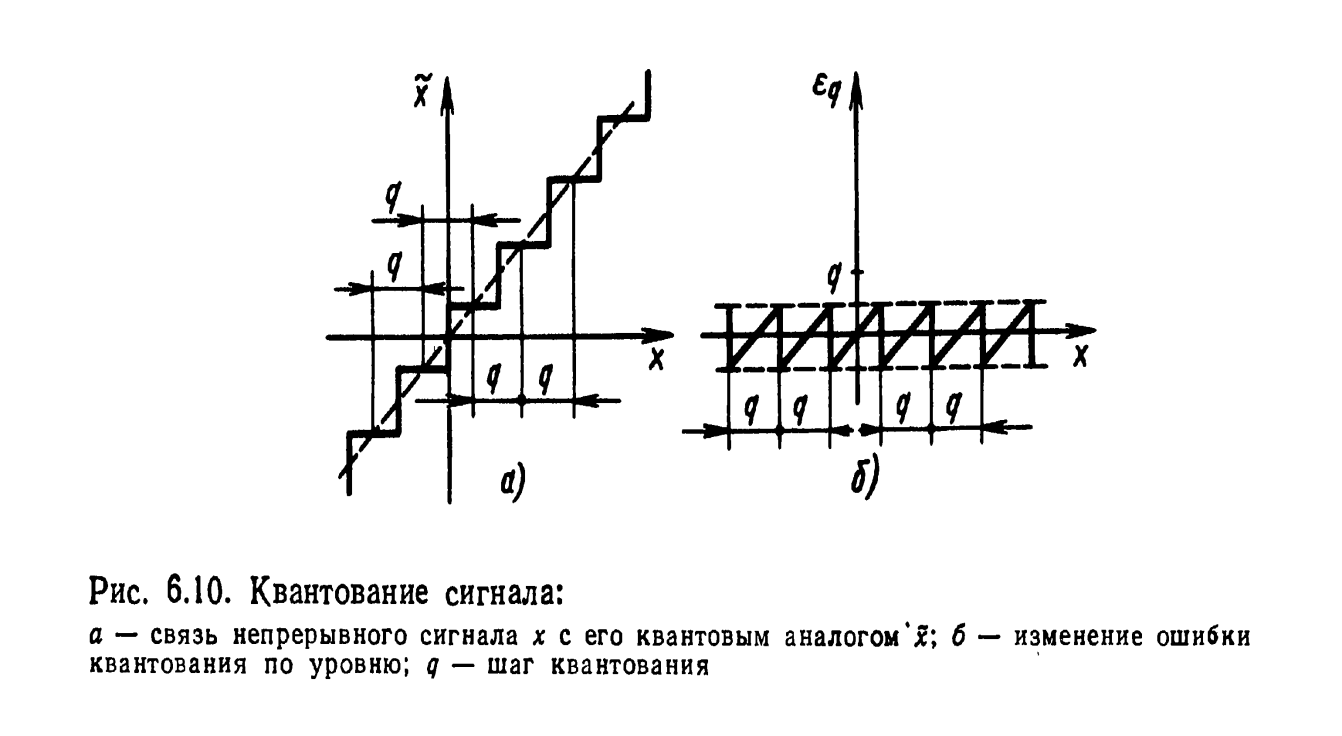
том динамического характера переходного процесса и образования нелинейных характеристик и связей погрешность ед может превзойти принятое максимальное значение <7/2 и даже привести к автоколебаниям.
В установившемся режиме общая погрешность в формировании сигнала в САР с микропроцессорным регулятором определяется суммой еобщ = ед + е* + еа, где гд и е* — погрешности, вызываемые соответственно квантованием по уровню и по времени; еа—амплитуда автоколебаний, не превышающая <7. На рис. 6.10, б видно, что е<ггаах = <7/2. При надлежащем выборе шага ДI квантования по времени можно обеспечить е*тах = <7/2. Следовательно, еобщ. тах = ?/2 + ?/2 + ц = 2ц.
Если АЦП и ЦАП имеют ^-разрядную сетку, то один из разрядов отводится на хранение алгебраического знака сигнала. В этом случае максимальный цифровой код
и разрешающая способность САР
К — «^шах/^шах = -^шах/2 »
где хтах — максимальное значение выходной координаты системы.
Разрешающая способность системы и определяет шаг квантования сигнала по уровню, так как = <7. Следовательно, еобщ = = 2#, т. е. К = еобщ/2, или еобщ/2 = Хтах/2^"1, откуда 2"~2 > ^ *тах/е0бщ- Полученное соотношение дает возможность выбрать число разрядов микропроцессора, если задана еобщ.
Переходный процесс датчиков в САР считается закончившимся, как только отклонение измеряемого параметра, например Ф, от заданного равновесного состояния будет удовлетворять условию ф < фе. Если принять, что фе = еобщ ^ 0,05ф (оо), то при фгаах = (1 + ат) ф (оо) [где ат — максимальное значение,
выраженное в относительных единицах от <р (оо) ] справедливо соотношение
одг—2 \ П + °т) ф (°°) 1 Н~ °т ^ 0,05ф (оо) 0,05
Так, например, от = 0,4 дает 2^“2 > 25 или N — = (1^ 25/1§ 2) + 2 = 6,64 7. Серийные микропроцессоры в большинстве случаев имеют восьмиразрядную структуру и поэтому вполне приемлемы для решения задач автоматического регулирования.
При выборе шага квантования по времени следует учитывать, что по мере уменьшения шага Д/ квантования, как правило, улучшаются показатели качества процесса регулирования, появляется возможность управлять более сложными объектами, увеличивается полоса частот воспринятых сигналов. Вместе с тем уменьшение ДI приводит к резкому возрастанию сложности реализации такой системы, а следовательно, и стоимости микропроцессора. Кроме этого, наличие погрешности ед, достигающей 9/2, делает заведомо нецелесообразными попытки исключить е*, так как вполне достаточно обеспечить е* < 9/2. Практика показала, что для систем с апериодическим переходным процессом при отсутствии запаздывания при выборе А! можно ориентироваться на минимальное значение коэффициента дифференциального уравнения элемента, входящего в САР, который характеризует его инерционность. Если таким коэффициентом является, например, Гр, то выбор Д/ должен удовлетворить неравенству
Тр тш/8 ^ Д* ^ Тр т1п/4.
Если задано допустимое время переходного процесса системы /р, то при выборе Д/ можно пользоваться неравенством
*р/15 < Д* < /р/6.
После установления требуемой разрядности микропроцессора и шага квантования по времени можно выбрать серийный микропроцессор, посредством которого может быть реализован требуемый закон регулирования.
К основным недостаткам электрических (электронных) регуляторов следует отнести необходимость электрической энергии, исчезновение которой влечет отключение системы регулирования, а также практическую невозможность ремонта системы регулирования вне заводских условий. В связи с этим электронные системы следует строить в виде легко заменяемых блоков, наличие которых должно быть предусмотрено перечнем запасных деталей и узлов силовой установки.