

Глава 5
ДВУХИМПУЛЬСНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
§ 5.1. Двухимпульсные регуляторы по скорости и ускорению
Анализ возможностей различных принципов регулирования (см. §2.11) показал определенные преимущества каждого из них. Однако способность обеспечивать устойчивость работы при различных свойствах регулируемого объекта имеет только принцип Ползунова — Уатта. Стремление использовать в САР преимущества различных принципов регулирования привело к созданию двухимпульсных* регуляторов.
В автоматических регуляторах двигателей применяют двух- импульсные регуляторы, работающие в соответствии с принципами Ползунова — Уатта и братьев Сименс. Они реагируют не только на изменение угловой скорости, но и на изменение углового ускорения. Такой эффект может быть получен, если в чувствительном элементе, показанном на рис. 3.1, д, выполнить пазы, в которых располагаются грузы, не радиально, как в схеме на рис. 3.1, ду ас определенным наклоном под углом а (рис. 5.1). При появлении ускорения (например, в сторону увеличения частоты вращения) скошенные пазы траверсы 2 воздействуют на грузы 1, имеющие инерционность, таким образом, что перемещают их в сторону увеличения радиуса вращения. Муфта 5 получает при этом перемещение вправо, уменьшая подачу топлива. В таком чувствительном элементе появляются две дополнительные силы:
действующие по касательной к окружности вращения тангенциальные инерционные силы шаров
Л = ТЩаГ (Жйр/<И),
где тш — масса шаров; г — радиус вращения шара;
.сила взаимодействия грузов 1 с конической тарелкой 3, определяемая значением момента инерции /м опорного диска муфты 5 регулятора:
Ри — (Ум/г)(йсОрДй).
(5.1)
(5.2)
Термин «двухимпульсный» неточен и применен здесь как традиционный. В действительности под этим термином подразумевается регулятор, чувствительный элемент (чувствительные элементы) которого воспринимает изменения двух входных координат, отражающих состояние регулируемого объекта.

Если й1 — расстояние, на которое перемещается шар вдоль паза, а йг — увеличение его радиуса вращения, то условие приведения сил (5.1) и (5.2) к оси движения муфты регулятора примет вид
(Рг + Рм) А1 соз (90° - ос) = Рпр 0г,
где Рпр — сила, приведенная к муфте; йг — перемещение муфты регулятора.
Так как й1 = йг/соз а и йг = р, то
ЛхР==^(ЖорА*0, (5.3)
где инерционный коэффициент чувствительного элемента по ускорению
А} = Оп/ + Л./0 аДе Р- (5-4)
Таким образом, коэффициент А определяется не только массой шаров тт и конструкцией чувствительного элемента (г, а и Р), но и моментом инерции муфты. Поэтому масса упорного диска 16 на рис. 3.19,а значительно увеличена.
Уравнение динамического равновесия двухимпульсного чувствительного элемента (см. рис. 5.1), написанное в соответствии с принципом Даламбера, имеет вид
\кй2^г/(И2 + Ыкг/И + АЕ = Д (Лсор) + Д (Л/йшр/Л). (5.5)
Так как на равновесном режиме йа>р/й/ = 0, то Д (А^(ор/сИ) = А; (АсОр/сИ).
Путем подстановки соотношений (3.27)—(3.29), (5.6) и перехода к относительным отклонениям переменных (3.31) уравнение (5.5) после деления всех членов уравнения на коэффициент при ф можно представить в виде
Т1(12г\/сИ2 + ГКЛ)/Л + М = Тгй у/(И + ср — 0рар,
же
формулами, что и коэффициенты уравнения (3.33), а время Тг, характеризующее эффективность воздействия на двухимпульсный чувствительный элемент углового ускорения, формулой
ТГ = А^0ир/(2Е0).
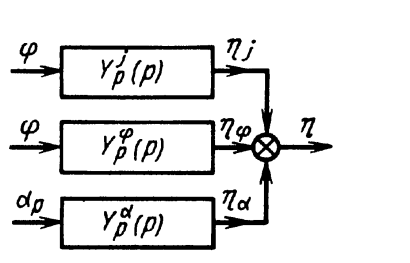
Рис. 5.2. Структурная схема двухимпульсного регулятора по скоростей ускорению
В операторной форме уравнение (5.7) имеет вид
(р) Л = «Р (?) Ф ~ 0р«р. (5-9) где (р) — собственный оператор чувствительного элемента, определяемой формулой (3.45); оператор воздействия по угловой скорости
ир{р) = Тгр + 1. (5.10)
Разделим все члены уравнения (5.9) на собственный оператор п = ^рО)ф + ^р(р)ф + Ур(р)<*р>
где передаточные функции двухимпульсного регулятора
VI о7) = (ТгР + \)1{т1р2 + Ткр + бг);
У% (/О = 1/(Т2рр2 + Ткр + б,); (5.11)
У Р (р) = - вр/(ту + ткр + бг).
В результате получим структурную схему, приведенную на рис. 5.2.