

П роектирование рычажного механизма по коэффициенту неравномерности движения
1.1Определение структуры, степени подвижности и класса механизма
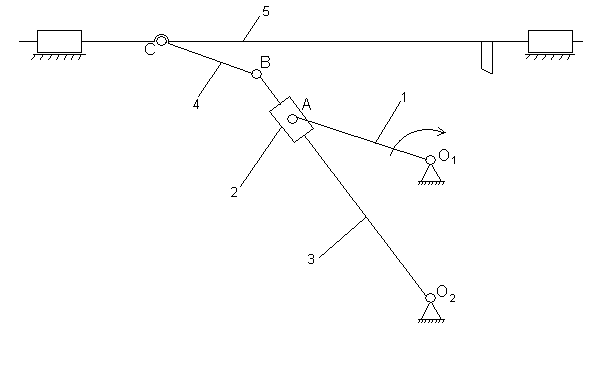
Структура данного механизма имеет следующий вид:
I(0,1)+II(2,3)+II(4,5)
Число степеней свободы определяется по формуле Чебышева:
W=3k-2p1-p2, (1)
где k- число подвижных звеньев, k=5,
p1- число кинематических одноподвижных пар, p1=7,
p2- число двухподвижных кинематических пар, p2=0.
Получаем:
W=3*5-2*7=1.
Класс механизма определяется классом наивысшей группы Ассура. Таким образом данный механизм второго класса.
Информацию о характеристике звеньев механизма сведём в таблицу 1.
Таблица 1- Характеристика звеньев механизма
№ |
Наименование |
Характеристика движения |
1 |
кривошип |
вращательное |
2 |
кулиса |
сложное (вращательное и поступательное |
3 |
кривошип |
вращательное |
4 |
шатун |
сложное (вращательное и поступательное) |
5 |
ползун |
поступательное |
С труктурный
анализ механизма
труктурный
анализ механизма
Входные звенья, каждое из которых присоединено с помощью вращательной или поступательной пары, стойки и имеют степень подвижности равную единице, называются ведущим звеном.
Кинематические цепи или структурные группы звеньев, имеющие число степеней подвижности равное нулю, называются группами Ассура.
Структурный анализ начинается с отделения группы Ассура наиболее удалённой от ведущего звена.
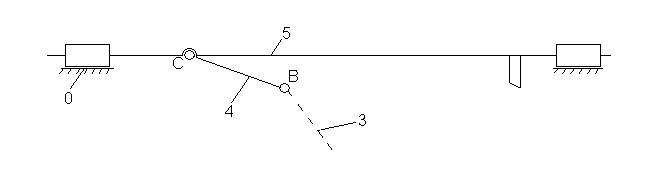
Группа образована двумя звеньями: 4 и 5, входящими в две вращательные кинематические пары: 4 и 3 и 4 и 5, и одну поступательную кинематическую пару: 5 и 0.
Класс группы Ассура определяется количеством пар в замкнутом контуре.
Класс II.
Порядок группы Ассура определяется количеством внешних кинематических пар, которыми группа присоединяется к звеньям механизма.
Порядок 3.
Вид группы Ассура 2.

Группа образована двумя звеньями: 2 и 3, входящими в две вращательные кинематические пары: 4 и 3 и 3 и 0, и одну поступательную кинематическую пару: 2 и 3.
Класс группы Асcура II.
Порядок группы
Ассура  2.
2.
Вид группы Ассура 2.
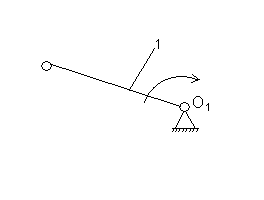
Звено І класса.
На основании проведённого структурного анализа, определяем, что данный механизм является механизмом II класса, 3 порядка.
Таблица 2 - Характеристики кинематических пар.
Обозначение |
Соединение звеньев |
Вид пары |
Степень подвижности |
01 |
0,1 |
вращательная |
1 |
A |
1,2 |
вращательная |
1 |
02 |
0,3 |
вращательная |
1 |
A |
2,3 |
поступательная |
1 |
B |
3,4 |
вращательная |
1 |
C |
4,5 |
вращательная |
1 |
D |
0,5 |
поступательная |
1 |
1 .2. Построение планов положений механизма
Отрезок изображающий на чертеже длину кривошипа О1А принимаем равным 30 мм.
Определим масштабный коэффициент для построения планов положений:
![]()
Определяем длины звеньев на чертеже с учётом масштабного коэффициента:
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
Методом засечек строим 12 равноотстоящих планов положений, поворачивая кривошип на 30°.
Рассмотрим построение повернутого на 90° плана скоростей для первого положения механизма.