

Пассивный участок
Рассмотрим уравнения движения в проекциях на касательную и нормаль к траектории:
![]() ,
,
![]() ,
,
,
![]() .
.
Эта система уравнений интегрируется при следующих начальных условиях:
![]() ,
,
![]() ,
,![]() ,
,
![]() ,
,
Индекс «а» обозначает конец активного участка. Конечные значения активного участка становятся начальными значениями пассивного. Условие окончания интегрирования – у=0.
При расчете пассивного участка полета ЛА используется ряд допущений:
Реактивная сила R равна нулю (R=0);
Поверхность Земли представляется в виде бесконечной плоскости;
Масса ЛА постоянна (
 ).
).
Алгоритмы численного интегрирования
Решением дифференциального уравнения называется функция, которая при подстановке в дифференциальное уравнение обращает его в тождество. Если искомая (неизвестная) функция зависит от одной переменной, то дифференциальное уравнение называется обыкновенным, в противном случае дифференциальными уравнениями в частных производных. Наивысший порядок производной или старшего дифференциала искомой функции в уравнении называется порядком этого уравнения. Процесс отыскания решения называется интегрированием дифференциального уравнения. График решения на плоскости называется интегральной кривой. Разностные методы решения дифференциальных уравнений – это способы вычисления значений искомого решения y(x) на некоторой сетке значений аргумента. Разностные методы позволяют находить только конкретное(частное) решение, например решение задачи Коши. В настоящее время они являются основными при решении дифференциальных уравнений с помощью ПК. Одним из простейших разностных методов является метод ломаных, или Метод Эйлера. Если требуется решить задачу Коши, на отрезке [x, xN] на данном отрезке выбирают некоторую сетку значений аргумента x0,x1,…,xN, для которых вычисляют значения функции y по схеме:
Yn+1= yn + hnf(xn,yn ) ,hn=xn+1-xn ,
Где n= 0,1,…,N-1
В методе Эйлера подынтегральная функция выносится при нижнем пределе интегрирования: Δ(x,h)≈f(x,y(x) )h=y’h. Это приближение геометрически соответствует движению от точки x к точке x+h по касательной к кривой y(x) в точке x. Расчетные формулы метода Эйлера:
yk+1= yk + hf(xk,yk ), xk=xk-1+h,
y(x0)=y0, yk= y(xk).
Этот метод дает хорошее приближение к решению только для достаточно малых h, так как погрешность метода Эйлера определяется остаточным членом ряда Тейлора:

т.е. на каждом шаге вычислений R~h2. Для обеспечения сходимости шаг h следует выбирать достаточно малым. Для метода Эйлера-Коши погрешность имеет порядок h2.
Более высокую точность обеспечивает метод Рунге-Кутта. Вычислительная схема:
yk+1 =yk + Δy, yk= y(xk), xk=xk-1+h, Δk(xk,h)=
Δy= |
|
где
![]() =
f(xk ,yk )·h
,
=
f(xk ,yk )·h
,
![]() =
f(xk +
h/2 , yk +
h
/2)
,
=
f(xk +
h/2 , yk +
h
/2)
,
![]() =
f(xk +
h/2 , yk +
h
/2)
,
=
f(xk +
h/2 , yk +
h
/2)
,
![]() =
f(xk +
h , yk +
h
)·h.
=
f(xk +
h , yk +
h
)·h.
В
основе получения вычислительных схем
этого метода лежит разложение функции
y(x)
в ряд Тейлора с последующим преобразованием
отрезка ряда к виду, не содержащему
производных. На шаге hпроизводная
![]() апроксимируется
параболой второго порядка. Здесь функция
f(x,h)
определяется формулой парабол Симпсона
(формула Ньютона-Котеса для трех узлов):
апроксимируется
параболой второго порядка. Здесь функция
f(x,h)
определяется формулой парабол Симпсона
(формула Ньютона-Котеса для трех узлов):
![]()
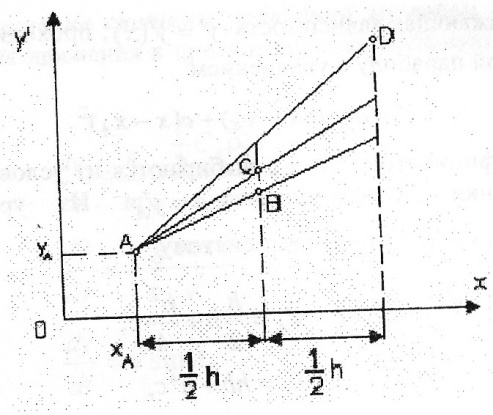
Если
дано дифференциальное уравнение
при
начальном условии (xA,yA)
определяют значение производной в
начальной т. А: ![]()
Рис. 2
Из
начальной т. А проводят прямую
y=yA+yB’(x-xА)
(рис. 2). Отмечают значение её ординаты
в середине шага интегрирования h
(т.В) с координатами ![]()
Находят
значение производной по формуле
т. В: ![]() y=yA+yB’(x-xА).
Отмечают значение ординаты этой прямой
в середине шага интегрирования h
(т.С) с координатами
y=yA+yB’(x-xА).
Отмечают значение ординаты этой прямой
в середине шага интегрирования h
(т.С) с координатами ![]()
По
уравнению
находят значение производной в т. С:
![]() y=yA+yС’(x-xА).
Значение ординаты этой прямой в конце
шага интегрирования h
(т.D)
с координатами
y=yA+yС’(x-xА).
Значение ординаты этой прямой в конце
шага интегрирования h
(т.D)
с координатами ![]()
В
результате построений находят значения
производных y’
в тт. A,
B,
Cи
D
(рис. 3)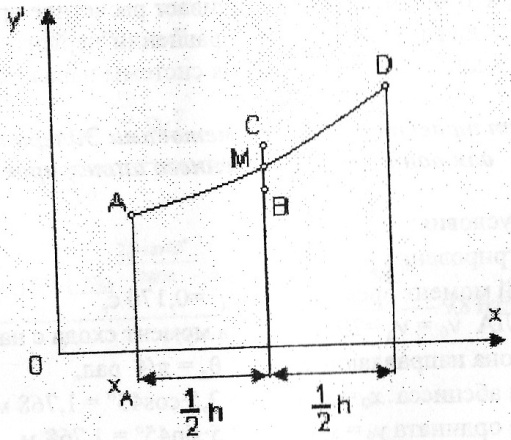 .
В точке с абсциссой
.
В точке с абсциссой ![]() получается два значения производной
вместо одного, что является следствием
приближенного метода. Принимается, что
в этой точке среднее значение производной
получается два значения производной
вместо одного, что является следствием
приближенного метода. Принимается, что
в этой точке среднее значение производной
![]() .
.
Кривая, изображающая зависимость y’=y’(x), проходит через тт. А, М и D и представляет собой параболу с рис. 3 уравнением:
y’=а+b(x-![]() 2.
2.
Значения
коэффициентов a,bи
с выбираются из условия прохождения
параболы через точки. Коэффициент a=![]() Из уравнения параболы y’=а+b(x-
2получают
систему:
Из уравнения параболы y’=а+b(x-
2получают
систему:
![]()
![]()
решение которой:
![]()
![]()
Интегрируется
уравнение параболы y’=а+b(x-
2в
пределах от x=xAдо
x=
xA+hΔy=![]() Таким
образом:
Таким
образом:
![]()
Достоинство метода Рунге-Кутта в том, что алгоритмы, полученные на его основе, являются однородными, т.е. не изменяющимися при переходе от одной точки сетки к другой. Кроме того, можно изменять шаг интегрирования в соответствии с требуемой точностью вычислений без значительного усложнения самого алгоритма. Основной недостаток в том, что для нахождения приближенного решения в одной точке сетки требуется несколько вычислений правой части уравнения f(x,y), что значительно увеличивает расчетное время вычислений.
Для системы дифференциальных уравнений первого порядка данный алгоритм выполняется для каждого уравнения системы параллельно.