

1.2. Общая структура управления гибкой производственной системой
Система управления ГПС предназначена для обеспечения совместной работы всех подсистем и компонент ГПС с целью максимально полезного использования оборудования с ЧПУ и выполнения поставленных заданий. Различные подсистемы системы управления ГПС решают все множество задач управления на всех уровнях управления, вплоть до управления исполнительными устройствами технологического оборудования. При таком множестве задач системы управления ГПС должны быть построены по иерархическому признаку с декомпозицией общей задачи управления по уровням.
Функциональная схема системы управления ГПС на уровне линии, участка или цеха [I] приведена на рис. 1.2.
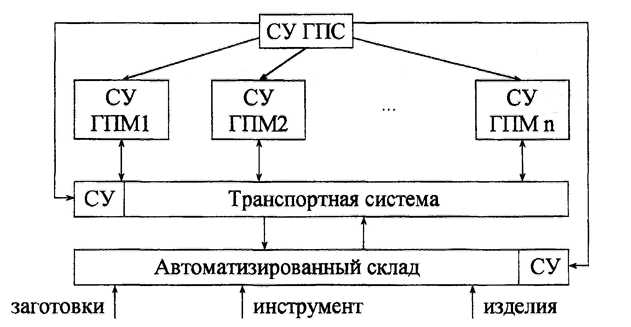
Рис. 1, 2. Функциональная схема системы управления ГПС
В общем случае гибкие производственные модули представляют собой обрабатывающие модули (токарные, фрезерные и другие станки с промышленными роботами) и контрольно-измерительный модуль. Каждый гибкий производственный модуль имеет свою систему управления, основной функцией которой является управление технологическим оборудованием на основе управляющих программ, а также формирование сообщений о завершении обработки по управляющей программе или об аварийных ситуациях. Общее управление ГПС, а также координацию работы всех модулей осуществляет система управления ГПС.
Структуры функционального автомата применительно к станку с ЧПУ, ГПМ и ГПС показаны на рис, 1.5, в которых выделены исполнительная (операционная) и управляющая части. Это означает, что организация управления на разных уровнях иерархии идентична. Однако классы задач для операционного автомата и управляющего автомата на каждом уровне иерархии сугубо специфичны.
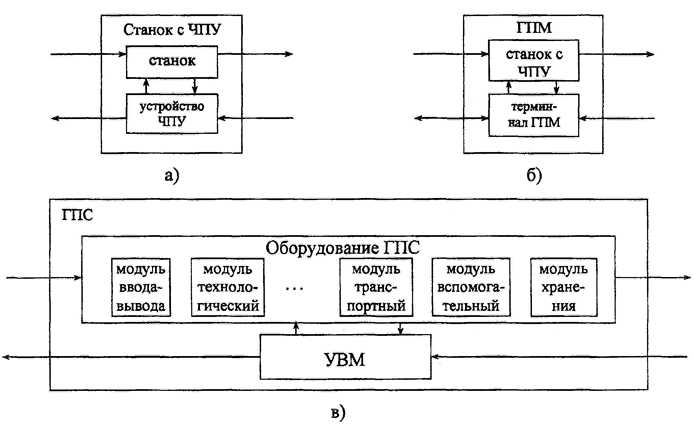
Рис, 1.5. Иерархия функциональных автоматов -моделей автоматического производственного оборудования
Укрупненная схема организации управления ГПС в реальном времени приведена на рис, 1.6. Объектом управления в ГПС является оборудование, представленное модулями ввода-вывода, технологическими, транспортными, вспомогательными и хранения. Управление осуществляется посредством инициирования (или передачи) управляющих программ ЧПУ, а также с помощью команд прямого управления оборудованием. Состояние оборудования и технологического процесса отображается в информационной молили, которая замыкает двумя каналами обратной связи контур управления. Один из каналов является главным, т.е, определяет стратегию управления, а другой - информационный.
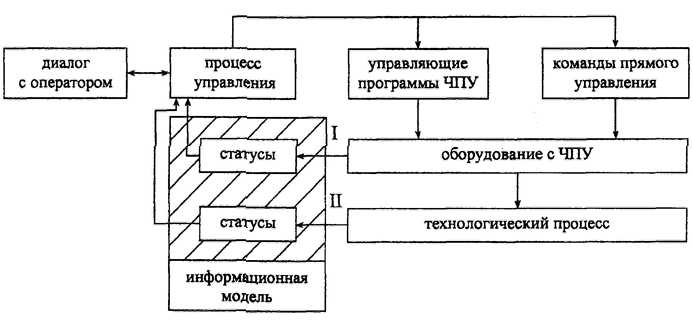
Рис. 1,6. Схема организации управления ГПС в реальном времени
Процесс управления, может быть, замкнут главной обратной связью по состоянию оборудования или по состоянию активных технологических процессов, представленных маршрутами операций. Выбор способа замыкания контура управления главной обратной связью означает предпочтение одной из двух концепций управления.
1. Контур управления замкнут главной обратной связью по состоянию оборудования. В этом случае состояния станков, промышленных роботов, транспортнь1х и других средств (свободен, занят, требует загрузки, требует разгрузки, неисправен и т. д,) формируют запросы на выполнение работ или от подобных запросов уклоняется. Система управления ГПС, располагая некоторым резервом работ, выделяет их соответственно запросам в виде управляющей программы ЧПУ,
Под управляющей программой ЧПУ, в широком смысле, понимают программу для локальной системы управления или координирующего компьютера гибкого производственного модуля. В дальнейшем управление осуществляется в форме координации и синхронизации работы управляющих программ ЧПУ и напоминает по своим функциям задачу управления коллективом алгоритмов. Подобная
координация и синхронизация составляют задачу диспетчеризации или оперативного управления,
2. Контур управления замкнут главной обратной связью по состоянию активных технологических процессов, представленных маршрутами операций. Пример маршрута операций представлен на рис, 1-7. Маршруты операций состоят из отдельных операций. Под операциями понимают процессы хранения, транспортирования, ввода-вывода, технологические и вспомогательные действия, выполнение которых связано с "захватом" соответствующих модулей в составе оборудования ГПС. Поскольку одновременно активны несколько маршрутов, постольку на один и тот же модуль может претендовать более одной операции, В этом случае возникают очереди, управление которыми связано с "захватом" соответствующих модулей в
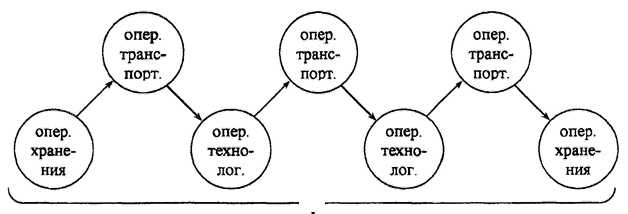
Рис.1.7 Маршрут операций
составе оборудования ГПС, что является задачей диспетчеризации (оперативного управления). Выделение модуля для операции означает продвижение маршрута на один очередной шаг. Полное множество активных маршрутов находится в поле зрения системы оперативного управления, которая и руководит продвижением маршрутов через управление оборудованием ГПС.
Из двух задач оперативного управления в настоящее время более популярна первая, т.е. управление по состоянию технологического оборудования.