

Федеральное Агентство по образованию
Санкт-Петербургский Государственный Технологический Университет
Растительных Полимеров
Кафедра АТПиП
Лабораторная работа №1
“ИММИТАЦИОННОЕ МОДЕЛИРОВАНИЕ ЛИНЕЙНОЙ ДИСКРЕТНОЙ ОДНОКОНТУРНОЙ СИСТЕМЫ”
Вариант II/5
Выполнил: студент гр.542:
Бухарин А.В.
Проверил: доцент
Селянинова Л.Н.
Санкт-Петербург
2010г.
Цель работы.
Выполнение лабораторной работы преследует следующие цели:
- изучение структуры и возможностей стандартного программного обеспечения «Автоматизированной системы имитационного моделирования» - ASIM_LIN;
- решение ряда вопросов параметрического синтеза и анализа линейных одноконтурных дискретных систем регулирования, использующих амплитудно-импульсную модуляцию сигналов.
Исходные данные:
1.Обьект регулирования:
Канал управления: «изменение расхода оборотной воды – изменение концентрации массы»
Математическая
модель: ![]() ,
,
где T=50 [c] – постоянная времени объекта по каналу управления;
kо
= -0,03 [![]() ]
– коэффициент передачи объекта по
каналу управления;
]
– коэффициент передачи объекта по
каналу управления;
τ = 20 [c] – запаздывание по каналу управления.
2.Датчик с преобразователем:
Wдат(p)
= kд,
где kд
= 0,22
3.Регулирующий блок:
Дискретный
регулятор: ![]() ,
,
где k1 и k2 – настройки дискретного ПИ-регулятора.
Исполнительный механизм:
Wим(p)
= kим,
где kим
= 122 [![]() ]
]
4. Регулирующий орган:
Wро(p)
= kро
,
где kро
= 0,32 [ ]
]
5.Период дискретности работы системы:
To = 10 [c].
6.Требования к качеству управления:
1. Точность поддержания значения концентрации: Е = ±0,1[% конц.];
2. Степень колебательности: m=1,1.
3. Схема дискретной системы управления:

4. Графики области устойчивости (оу) и линии равного запаса устойчивости (лвз):
а) График области устойчивости:
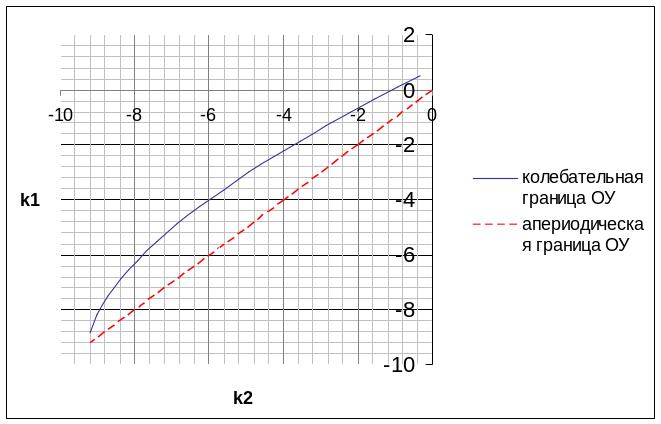
б) График линии равного запаса устойчивости (m=1,1 m – степень колебательности):

Рекомендуемые параметры регулятора: К1= - 2,9013; К2= - 2,4127.
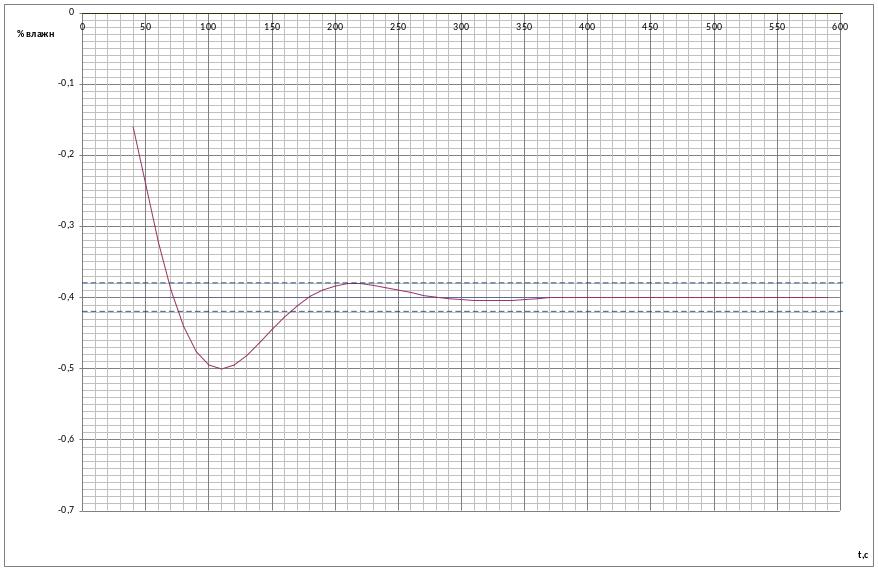
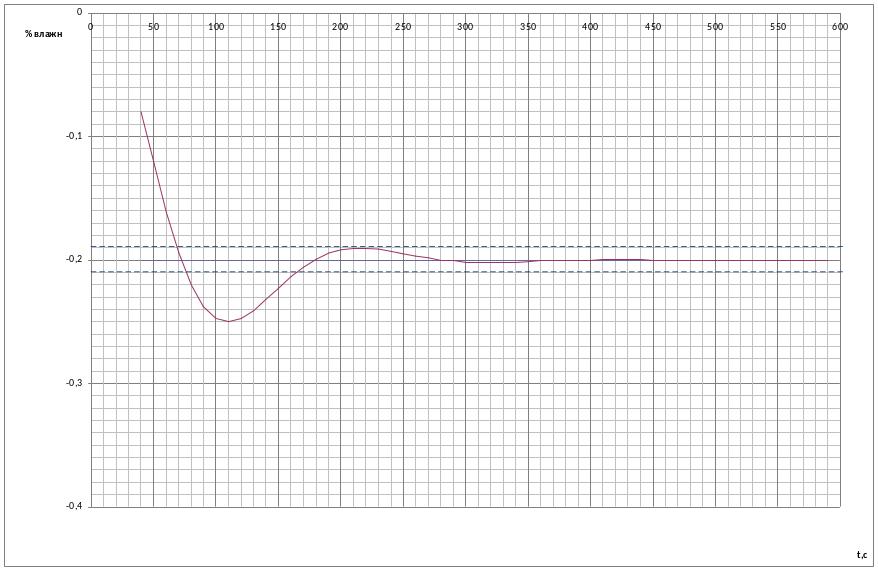
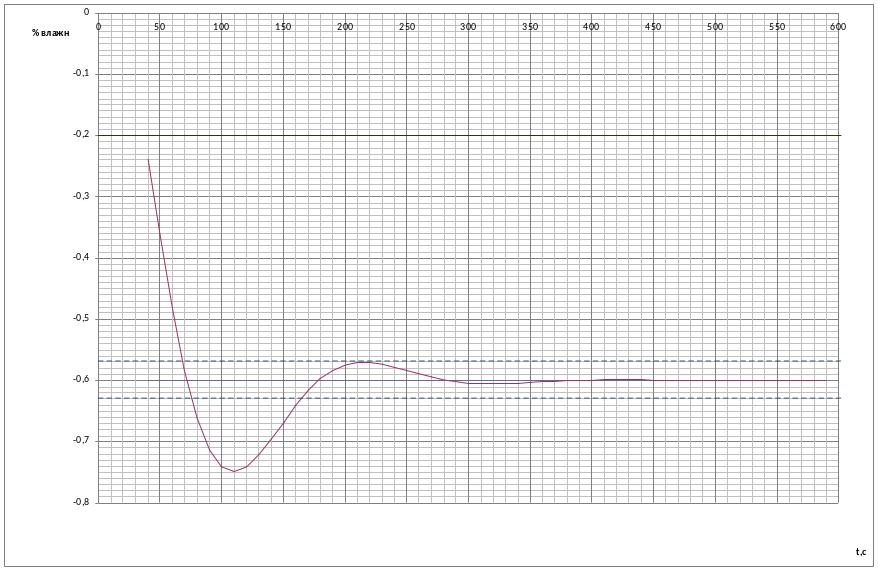
5. Графики изменения ∆g(t) и ∆y(t) при различных значениях задающего воздействия и оптимальных настроек регулятора:
Изменение задающего воздействия:
∆g(t)=a*1[t]
По заданию варианта:
a= -0,4 % конц.
Изменяя
значение задающего воздействия на ![]() от
заданного, получаем:
от
заданного, получаем:
a= -0,2% конц;
a= -0,6% конц;
Графики представлены каждый на отдельном листе.
6. Оценка качества системы управления
1. Оценка точности:
Задача работы системы управления заключается в том, чтобы в любой момент времени Δy(t) = Δg(t).
Но это равенство нарушается вследствие наличия в системе статической ошибки ΔE(t).
Для нахождения конечного значения статической ошибки для канала управления используем формулу:
ΔE∞ = Δg∞ – Δy∞,
где Δg∞ – изменение задающего воздействия;
Δy∞ – новое установившееся значение.
ΔE1∞ = 0,4 – 0,4 = 0 [% конц];
ΔE2∞ = 0,2 – 0,2 = 0 [%конц];
ΔE3∞ = 0,6 – 0,6 = 0 [%конц].
2. Запас устойчивости системы управления:
Запас устойчивости определяет степень удаленности системы от колебательной границы.
По каналу управления:
Перерегулирование:![]() 100[%],
100[%],
где Δyмах – максимальное динамическое отклонение;
Δy∞ – новое установившееся состояние.
σ1
=![]() =0,2495 или 24,95%
=0,2495 или 24,95%
σ2 = =0,2495 или 24,95%
σ3 = =0,2495 или 24,95%
Затухание
за период:
![]() [%],
[%],
где y1 – первое максимальное значение;
y3 – второе максимальное значение.
ξ1 = =0,9589 или 95,89%
ξ1 = =0,9579 или 95,79%
ξ1 = =0,8753 или 87,53%
3. Быстродействие:
По каналу управления быстродействие системы определяется по двум показателям:
А) по времени окончания переходного процесса системы
t пер. пр. =5 % от Δy∞.
Б) по времени регулирования
t рег = {+Е ;- Е }.
Таблица 1. Качественные и количественные характеристики системы при изменении задающего воздействия и оптимальных значениях настроек регулятора: K1опт = -4.2309; K2опт = -3.4032;
Задание
G |
Установив-шееся состояние ∆Y∞ |
Статичес-кая ошибка ∆Е∞, %конц. |
Время регули-рования, Трег, с |
Время переход-ного процесса, Тп.п, с |
Пере-регули-рование σ, % |
Затуха-ние за период ξ, % |
Средний квадрат ошибки за время t , с |
-0,4 |
-0,4 |
0 |
56 |
164 |
24,95 |
19,14 |
0,0147 |
-0,2 |
-0,2 |
0 |
44 |
164 |
24,95 |
19,13 |
0,0037 |
-0,6 |
-0,6 |
0 |
63 |
164 |
24,95 |
19,14 |
0,0331 |
Вывод.
При оптимальных настройках регулятора, а именно при K1опт и K2опт система имеет одинаковые значения времени переходного процесса, перерегулирования и затухания за период, критериями для выбора остаются время регулирования и значение среднего квадрата ошибки. Наименьшее значение среднего квадрата ошибки имеем при 0.5*G.
РЕЗУЛЬТАТЫ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
ОДНОКОНТУРНОЙ ЦИФРОВОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
( АИМ- модуляция сигналов )
26.02.10
*^******************************************************************
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА ПО КАНАЛУ УПРАВЛЕНИЯ :
K * Exp(-Tau*P)
W(P) = ----------------- .
1 + T*P
ПАРАМЕТРЫ МОДЕЛИ ОБЪЕКТА :
Коэффициент передачи K = -0.03
Постоянная времени T = 50.000
Запаздывание Tau = 20.000
*^******************************************************************
ПАРАМЕТРЫ ЭЛЕМЕНТОВ СИСТЕМЫ :
Коэффициент передачи датчика 0.22
Коэффициент передачи испол.устройства 122.000
Коэффициент передачи регулирующего органа 0.32
ДИСКРЕТНОСТЬ РАБОТЫ СИСТЕМЫ 10.000
*^******************************************************************
РАСЧЕТ ОБЛАСТИ УСТОЙЧИВОСТИ
( ЛИНИИ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ )
ЛИНЕЙНОЙ ЦИФРОВОЙ СИСТЕМЫ
********************************************************************
ОБЛАСТЬ УСТОЙЧИВОСТИ В ПЛОСКОСТИ К1 и К2
О П Р Е Д Е Л Я Е Т С Я СЛЕДУЮЩИМ ОБРАЗОМ :
АПЕРИОДИЧЕСКАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ НЕРАВЕНСТВА K1 < K2
КОЛЕБАТЕЛЬНАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ ЗНАЧЕНИЙ
----------------------------------------
K1 ¦ K2
----------------------------------------
-0.33958 ¦ 0.49695
-0.91767 ¦ 0.10023
-1.53675 ¦ -0.33561
-2.18842 ¦ -0.80811
-2.86372 ¦ -1.31461
-3.55321 ¦ -1.85222
-4.24706 ¦ -2.41783
-4.93517 ¦ -3.00815
-5.60721 ¦ -3.61973
-6.25280 ¦ -4.24892
-6.86157 ¦ -4.89193
-7.42328 ¦ -5.54483
-7.92792 ¦ -6.20357
-8.36583 ¦ -6.86396
-8.72779 ¦ -7.52176
-9.00514 ¦ -8.17261
-9.18986 ¦ -8.81211
-9.27467 ¦ -9.43581
----------------------------------------
********************************************************************
СТЕПЕНЬ КОЛЕБАТЕЛЬНОСТИ M = 1.1
ЛИНИЯ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ
----------------------------------------
K1 | K2
----------------------------------------
-3.90168 | -2.33141
-3.60262 | -2.75586
-2.70327 | -1.12120
-2.20907 | -1.43187
-1.05301 | -1.69216
-1.09255 | -1.90624
-1.19755 | -0.11810
-0.29021 | -0.19160
-0.31303 | -0.25036
-0.41976 | -0.29787
-0.42541 | -0.34738
-0.39077 | -0.36197
-0.30331 | -0.35453
-0.20118 | -0.31774
-0.16766 | -0.23411
-0.10602 | -0.19596
-0.08952 | -0.012541
----------------------------------------
********************************************************************
РЕКОМЕНДУЕМЫЕ ПАРАМЕТРЫ РЕГУЛЯТОРА :
-------------------------------
НАСТРОЙКА - K1 = -0.4231
НАСТРОЙКА - K2 = -0.3403
-------------------------------
*~******************************************************************
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = -0.4000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -0.4231
Настройка К2 = -0.3403
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 -0,4000 1,4536 0,0000 0,1600
1 -0,4000 1,7380 0,0000 0,1600
2 -0,4000 2,0225 0,0000 0,1600
3 -0,4000 2,3070 -0,0790 0,1600
4 -0,4000 2,3042 -0,1592 0,1486
5 -0,4000 2,2410 -0,2404 0,1335
6 -0,4000 2,1175 -0,3222 0,1181
7 -0,4000 1,9334 -0,3891 0,1041
8 -0,4000 1,7457 -0,4405 0,0925
9 -0,4000 1,5668 -0,4758 0,0834
10 -0,4000 1,4098 -0,4947 0,0764
11 -0,4000 1,2872 -0,4999 0,0707
12 -0,4000 1,2008 -0,4945 0,0661
13 -0,4000 1,1494 -0,4815 0,0620
14 -0,4000 1,1293 -0,4642 0,0583
15 -0,4000 1,1342 -0,4454 0,0549
16 -0,4000 1,1570 -0,4272 0,0518
17 -0,4000 1,1910 -0,4111 0,0490
18 -0,4000 1,2299 -0,3983 0,0464
19 -0,4000 1,2686 -0,3890 0,0441
20 -0,4000 1,3036 -0,3833 0,0420
21 -0,4000 1,3323 -0,3807 0,0401
22 -0,4000 1,3536 -0,3807 0,0384
23 -0,4000 1,3674 -0,3825 0,0368
24 -0,4000 1,3743 -0,3856 0,0353
25 -0,4000 1,3754 -0,3894 0,0340
26 -0,4000 1,3722 -0,3931 0,0327
27 -0,4000 1,3660 -0,3966 0,0316
28 -0,4000 1,3583 -0,3995 0,0305
29 -0,4000 1,3501 -0,4017 0,0294
30 -0,4000 1,3425 -0,4032 0,0285
31 -0,4000 1,3359 -0,4040 0,0276
32 -0,4000 1,3308 -0,4042 0,0268
33 -0,4000 1,3273 -0,4039 0,0260
34 -0,4000 1,3253 -0,4033 0,0252
35 -0,4000 1,3246 -0,4026 0,0245
36 -0,4000 1,3249 -0,4018 0,0239
37 -0,4000 1,3259 -0,4010 0,0233
38 -0,4000 1,3274 -0,4004 0,0227
39 -0,4000 1,3291 -0,3998 0,0221
*~******************************************************************
*~******************************************************************
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = -0.2000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -0.4231
Настройка К2 = -0.3403
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 -0,2000 0,7268 0,0000 0,0400
1 -0,2000 0,8690 0,0000 0,0400
2 -0,2000 1,0112 0,0000 0,0400
3 -0,2000 1,1535 -0,0395 0,0400
4 -0,2000 1,1521 -0,0796 0,0372
5 -0,2000 1,1205 -0,1202 0,0334
6 -0,2000 1,0587 -0,1611 0,0295
7 -0,2000 0,9667 -0,1946 0,0260
8 -0,2000 0,8728 -0,2202 0,0231
9 -0,2000 0,7834 -0,2379 0,0209
10 -0,2000 0,7049 -0,2473 0,0191
11 -0,2000 0,6436 -0,2500 0,0177
12 -0,2000 0,6004 -0,2473 0,0165
13 -0,2000 0,5747 -0,2408 0,0155
14 -0,2000 0,5647 -0,2321 0,0146
15 -0,2000 0,5671 -0,2227 0,0137
16 -0,2000 0,5785 -0,2136 0,0130
17 -0,2000 0,5955 -0,2056 0,0122
18 -0,2000 0,6149 -0,1991 0,0116
19 -0,2000 0,6343 -0,1945 0,0110
20 -0,2000 0,6518 -0,1916 0,0105
21 -0,2000 0,6661 -0,1903 0,0100
22 -0,2000 0,6768 -0,1903 0,0096
23 -0,2000 0,6837 -0,1913 0,0092
24 -0,2000 0,6872 -0,1928 0,0088
25 -0,2000 0,6877 -0,1947 0,0085
26 -0,2000 0,6861 -0,1966 0,0082
27 -0,2000 0,6830 -0,1983 0,0079
28 -0,2000 0,6791 -0,1998 0,0076
29 -0,2000 0,6751 -0,2009 0,0074
30 -0,2000 0,6712 -0,2016 0,0071
31 -0,2000 0,6680 -0,2020 0,0069
32 -0,2000 0,6654 -0,2021 0,0067
33 -0,2000 0,6637 -0,2019 0,0065
34 -0,2000 0,6626 -0,2017 0,0063
35 -0,2000 0,6623 -0,2013 0,0061
36 -0,2000 0,6624 -0,2009 0,0060
37 -0,2000 0,6630 -0,2005 0,0058
38 -0,2000 0,6637 -0,2002 0,0057
39 -0,2000 0,6646 -0,1999 0,0055
*~******************************************************************
*~******************************************************************
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = -0.6000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -0.4231
Настройка К2 = -0.3403
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 -0,6000 2,1804 0,0000 0,3600
1 -0,6000 2,6070 0,0000 0,3600
2 -0,6000 3,0337 0,0000 0,3600
3 -0,6000 3,4604 -0,1186 0,3600
4 -0,6000 3,4562 -0,2388 0,3344
5 -0,6000 3,3615 -0,3605 0,3004
6 -0,6000 3,1762 -0,4834 0,2657
7 -0,6000 2,9001 -0,5837 0,2341
8 -0,6000 2,6185 -0,6607 0,2082
9 -0,6000 2,3503 -0,7137 0,1877
10 -0,6000 2,1147 -0,7420 0,1718
11 -0,6000 1,9308 -0,7499 0,1592
12 -0,6000 1,8012 -0,7418 0,1487
13 -0,6000 1,7241 -0,7223 0,1395
14 -0,6000 1,6940 -0,6964 0,1312
15 -0,6000 1,7012 -0,6681 0,1236
16 -0,6000 1,7355 -0,6407 0,1166
17 -0,6000 1,7864 -0,6167 0,1102
18 -0,6000 1,8448 -0,5974 0,1044
19 -0,6000 1,9029 -0,5835 0,0992
20 -0,6000 1,9553 -0,5749 0,0945
21 -0,6000 1,9984 -0,5710 0,0902
22 -0,6000 2,0304 -0,5710 0,0863
23 -0,6000 2,0511 -0,5738 0,0828
24 -0,6000 2,0615 -0,5785 0,0795
25 -0,6000 2,0631 -0,5840 0,0764
26 -0,6000 2,0583 -0,5897 0,0736
27 -0,6000 2,0490 -0,5949 0,0710
28 -0,6000 2,0374 -0,5993 0,0685
29 -0,6000 2,0252 -0,6026 0,0663
30 -0,6000 2,0137 -0,6048 0,0641
31 -0,6000 2,0039 -0,6059 0,0621
32 -0,6000 1,9963 -0,6062 0,0602
33 -0,6000 1,9910 -0,6058 0,0585
34 -0,6000 1,9879 -0,6050 0,0568
35 -0,6000 1,9869 -0,6039 0,0552
36 -0,6000 1,9873 -0,6027 0,0537
37 -0,6000 1,9889 -0,6015 0,0523
38 -0,6000 1,9912 -0,6006 0,0510
39 -0,6000 1,9937 -0,5998 0,0497
*~******************************************************************