

4.1 Синтез эвольвентного исполнительного механизма
4.1.1 Входные параметры синтеза, выбор коэффициентов смещения хi
Входными параметрами являются:
– число зубьев шестерни Z5 = 13;
– число зубьев колеса Z6 = 25;
– модуль m = 10 мм;
– коэффициенты смещения Z5 = 0,64, Z6 = 0,61.
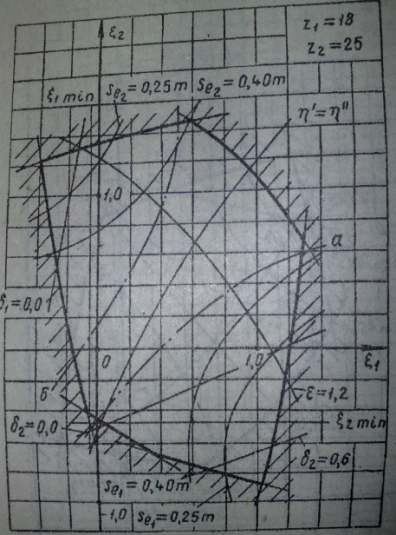
Коэффициенты смещения выбраны по блокирующему контуру (рис. 4.2), исходя из условия получения максимально возможной контактной прочности зубьев колеса и шестерни при коэффициенте торцового перекрытия εα = 1,21
Примем, что для нарезания колес будет использован инструмент реечного типа с нормальным исходным контуром по ГОСТ 13755-68, параметры которого:
– угол профиля α = 20º;
– коэффициент
высоты головки зуба ![]() ;
;
– коэффициент
граничной высоты ![]() ;
;
– коэффициент радиального зазора с* = 0,25.
ε = 1
ε
= 1,2
Рисунок 4.2 – Блокирующий контур
4.1.2 Расчет геометрических параметров и качественных показателей зацепления
Расчет параметров зубчатого зацепления выполнен с помощью ПЭВМ по приведенным ниже расчетным зависимостям [ ].
![]() , (4.1)
, (4.1)
где invαW = tgαW – αW;
invα = tgα – α;
![]() =
х5 + х6.
=
х5 + х6.
Уравнение (4.1) решено относительно αW методом последовательных приближений.
Межосевое расстояние зацепления:
![]() , (4.2)
, (4.2)
где
![]() – делительное межосевое расстояние.
– делительное межосевое расстояние.
Делительный диаметр колес:
di = mzi, (i 5,6). (4.3)
Начальные диаметры колес:
![]() ,
(i 5,6). (4.4)
,
(i 5,6). (4.4)
Основные диаметры колес:
dWi = di·cosα, (i 5,6). (4.5)
Диаметры впадин колес:
![]() ,
(i 5,6). (4.6)
,
(i 5,6). (4.6)
Диаметры вершин колес:
![]() ,
(i 5,6). (4.7)
,
(i 5,6). (4.7)
где Δy = – y – коэффициент уравнительного смещения;
![]()
 – коэффициент
воспринимаемого смещения.
– коэффициент
воспринимаемого смещения.
Окружной делительный шаг зубьев:
р = πm. (4.8)
Окружной основной шаг зубьев:
рв = р·cosα. (4.9)
Окружной начальный шаг зубьев:
![]() ,
(i = 5,6). (4.10)
,
(i = 5,6). (4.10)
Толщины зубьев окружные делительные:
Si = m(0,5π + 2xitgα), (i = 5,6). (4.11)
Толщины зубьев окружные основные:
Sbi = Ai·dbi, (i = 5,6). (4.12)
где ![]()
Толщины зубьев окружные начальные:
SWi = dWi·(Ai – invαW). (4.13)
Углы профилей зубьев колес в точке на окружности вершин:
![]() ,
(i = 5,6). (4.14)
,
(i = 5,6). (4.14)
Толщины зубьев по окружности вершин:
Sai = dai·(Ai – invαai), (i = 5,6). (4.15)
Радиусы кривизны активного профиля зубьев колес в нижней точке:
ρpi = aW·sinαW – Bi , (i = 5,6). (4.16)
где Вi = 0,5·dbi·tgαai.
Радиусы кривизны в граничных точках профилей зубьев колес:
![]() ,
(i = 5,6). (4.17)
,
(i = 5,6). (4.17)
Коэффициент торцевого перекрытия:
![]() . (4.18)
. (4.18)
Результаты машинного расчета приведены в таблице 4.1.
По ним составлена сводная таблица параметров зацепления (см. лист 2 графический части проекта).
Коэффициенты удельного скольжения в контактных точках профилей зубьев:
– для
шестерни ![]() . (4.19)
. (4.19)
– для
колеса ![]() . (4.20)
. (4.20)
Определение
значений
![]() и
и
![]() для положений контактной точки 1…9
на теоретической линии зацепления АВ
при делении ее на 10 равных частей и
нумерации, начинающейся с «0»
произведено с помощью ПЭВМ. Результаты
расчета см. в таблице 4.1.
для положений контактной точки 1…9
на теоретической линии зацепления АВ
при делении ее на 10 равных частей и
нумерации, начинающейся с «0»
произведено с помощью ПЭВМ. Результаты
расчета см. в таблице 4.1.
В точке «0» = –∞, = 1.
В точке «10» = 1, = –∞.