

ТЕОРИЯ ИНФОРМАЦИИ 3. ВРЕМЕННОЕ И ЧАСТОТНОЕ ПРЕДСТАВЛЕНИЕ СИГНАЛОВ
3. Временное и частотное представление сигналов
3.1. Временное представление сигналов
3.1.1. Разложение сигналов по единичным импульсам
Прямая координатная форма представления сигналов соответствует их естественной и привычной для нас форме математического описания в виде функций независимых переменных (аргументов или координат).
Единичные импульсы. Простейшим сигналом является единичный импульс. В качестве математической модели единичного импульса при анализе аналоговых сигналов используют дельта-функцию.
Дельта-функция. По определению, дельта-функция описывается двумя следующими математическими выражениями:

 при
при
 и
и
Функция
 равна нулю везде за исключением точки
τ, в которой она бесконечно велика и не
является дифференцируемой.
равна нулю везде за исключением точки
τ, в которой она бесконечно велика и не
является дифференцируемой.
Дельта-функция является полезной математической абстракцией. На практике такие функции не могут быть реализованы с абсолютной точностью, так как невозможно реализовать значение, равное бесконечности, в точке t = τ на временной шкале.
При всей своей
абстрактности дельта-функция имеет
вполне определенный физический смысл.
Представим себе импульсный сигнал
прямоугольной формы П(t-)
длительностью ,
амплитуда которого равна
 ,
а площадь соответственно равна 1. При
уменьшении значения
импульс, сокращаясь по длительности,
сохраняет свою площадь, равную 1, и
возрастает по амплитуде. Предел такой
операции при
→ 0 и носит название дельта-импульса.
Этот сигнал
сосредоточен в одной координатной точке
t
= τ, конкретное амплитудное значение
его не определено, но площадь (интеграл)
остается равной 1. Это не мгновенное
значение функции в точке t
= τ, а именно импульс – математическая
модель короткого действия, значение
которого равно 1.
,
а площадь соответственно равна 1. При
уменьшении значения
импульс, сокращаясь по длительности,
сохраняет свою площадь, равную 1, и
возрастает по амплитуде. Предел такой
операции при
→ 0 и носит название дельта-импульса.
Этот сигнал
сосредоточен в одной координатной точке
t
= τ, конкретное амплитудное значение
его не определено, но площадь (интеграл)
остается равной 1. Это не мгновенное
значение функции в точке t
= τ, а именно импульс – математическая
модель короткого действия, значение
которого равно 1.
Функция
Кронекера.
Для дискретных и цифровых систем
разрешающая способность по аргументу
сигнала определяется интервалом его
дискретизации Δt.
Это позволяет в качестве единичного
импульса использовать дискретный
интегральный аналог дельта-функции -
функцию единичного отсчета
 ,
которая равна 1 в координатной точке k
= n и нулю во
всех остальных точках. При этом функция
δ(kΔt
- nΔt),
может быть определена для любых значений
Δt
= const,
но только для целых значений координат
k
и n.
,
которая равна 1 в координатной точке k
= n и нулю во
всех остальных точках. При этом функция
δ(kΔt
- nΔt),
может быть определена для любых значений
Δt
= const,
но только для целых значений координат
k
и n.
Математические выражения и δ(kΔt - nΔt), называют также импульсами Дирака и Кронекера. Однако применяя такую терминологию, не будем забывать, что это не просто единичные импульсы в координатных точках τ и nΔt, а импульсные функции, определяющие как значения импульсов в определенных координатных точках, так и нулевые значения по всем остальным координатам, в пределе от - до .
Разложение сигнала. Импульсы Дирака и Кронекера используются для разложения, соответственно, произвольных аналоговых сигналов s(t) и дискретных сигналов s(kΔt) в непрерывную последовательность неперекрывающихся импульсов:

Для аналоговых сигналов разложение в физическом представлении эквивалентно сканированию значений сигнала s(t) в моменты времени t = τ бесконечно узкой щелью, бегущей вдоль оси t. Для цифровых сигналов эта щель равна одному отсчету.
С математических
позиций единичные импульсные функции
,
-
< τ
<
и
,
-
< n
<
представляют собой совокупности взаимно
ортогональных сигналов, образующих в
бесконечномерных пространствах системы
координатных базисов {
},
-
< τ
<
и {
},
-
< n
< .
Ортогональность импульсов обеспечивается
тем, что они являются неперекрывающимися.
По этим координатным базисам и производится
разложение сигналов s(t)
и s(kΔt),
то есть их представление в виде
совокупностей соответствующих проекций
- отсчетов
 и
и
 по координатам {
}
и {
}.
по координатам {
}
и {
}.
Импульсный отклик линейной системы. С понятием сигнал неразрывно связано понятие «система», взаимодействующая и сигналом. Системы передачи и хранения информации являются примером таких систем. Если на вход линейной системы в момент времени t = 0 подать единичный импульс, то на выходе мы получим реакцию системы на единичный входной сигнал. Эта реакция называется функцией импульсного отклика системы и однозначно определяется оператором преобразования h( ):
y(t) = T[δ(t - 0)] = h(t).
y(kΔt) = T[δ(kΔt - 0)] = h(kΔt).
Импульсный отклик аналоговой системы на входную дельта-функцию также в определенной степени представляет собой математическую абстракцию идеального преобразования. С практической точки зрения под импульсным откликом можно понимать отображение реакции системы на импульсный входной сигнал произвольной формы с единичной площадью, если длительность этого сигнала пренебрежимо мала по сравнению с временной (координатной) разрешающей способностью системы (например, с периодом ее собственных колебаний). Для цифровых систем импульсный отклик однозначно определяется реакцией системы на импульс Кронекера. Функцию импульсного отклика называют также весовой функцией системы.
В линейных инвариантных к сдвигу системах форма импульсного отклика не зависит от времени прихода входного сигнала и определяет только его положение на временной оси. Так, если входной импульс задержан (относительно 0) на время t0, то соответствующий выходной сигнал будет определяться выражением:
y(t) = T[δ(t - t0)] = h(t - t0).
В любой системе, работающей в реальном масштабе времени, сигнала на выходе системы не может быть, если нет сигнала на ее входе. Отсюда следует односторонность импульсного отклика физических систем: h(t - τ) = 0 при t < τ.
Для программных
систем, работающих с массивами цифровых
данных, импульсный отклик может быть и
двусторонним, так как при обработке
сигналов в любой текущей точке kΔt
системе доступны как «прошлые» отсчеты
 ,
так и «будущие» отсчеты
,
так и «будущие» отсчеты
 .
Соответственно, сигнал на выходе системы
может формироваться и по «будущим»
отсчетам. Это расширяет возможности
программной обработки сигналов по
сравнению с физическими системами.
.
Соответственно, сигнал на выходе системы
может формироваться и по «будущим»
отсчетам. Это расширяет возможности
программной обработки сигналов по
сравнению с физическими системами.
На Рис. 3.1.1 приведен пример импульсного отклика h(t) элементарной физической системы преобразования электрических сигналов – динамической интегрирующей RC-цепи на входной сигнал s(t).
При подаче на вход
RC-цепи
единичного и очень короткого (Δt
<< RC)
импульса заряда Δq
емкость С
заряжается до напряжения V0
=
 и начинает разряжаться через сопротивление
R,
при этом напряжение на емкости изменяется
по закону
и начинает разряжаться через сопротивление
R,
при этом напряжение на емкости изменяется
по закону
 .
Отсюда, импульсный отклик RC-цепи
на единичный входной сигнал с единичным
значением заряда Δq
= 1 равен:
.
Отсюда, импульсный отклик RC-цепи
на единичный входной сигнал с единичным
значением заряда Δq
= 1 равен:
 ,
где множитель
,
где множитель
 является масштабным преобразователем
сигнала (заряда в напряжение), а форма
отклика определяется функцией экспоненты.
По существу, импульсным откликом системы
определяется доля входного сигнала,
которая действует на выходе системы по
истечении времени t
после поступления сигнала на вход
(запаздывающая реакция системы).
является масштабным преобразователем
сигнала (заряда в напряжение), а форма
отклика определяется функцией экспоненты.
По существу, импульсным откликом системы
определяется доля входного сигнала,
которая действует на выходе системы по
истечении времени t
после поступления сигнала на вход
(запаздывающая реакция системы).
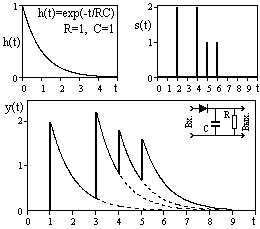
Рис. 3.1.1. Импульсный отклик h(t) динамической интегрирующей RC-цепи
Если функция импульсного отклика системы известна, то, с учетом принципа суперпозиции сигналов в линейной системе, можно рассчитать реакцию системы в произвольный момент времени на любое количество входных сигналов с любыми моментами времени их прихода путем сложения запаздывающих реакций системы на эти входные сигналы.