

4. Датчик положения ротора
В состав датчика положения ДП входят три чувствительных элемента - датчики Холла Dc, DA, DB, ограничительные резисторы R1, R2 и стабилизированный источник питания датчиков Холла ИПДХ, рис.5.1,а. ДП определяет момент и последовательность коммутации тока в фазных обмотках ВД. Является дискретным логическим элементом и располагается непосредственно под обмотками двигателя.

Рис.5.1. Датчик положения ротора БДПТ - а, сигнал на выходе ДП в зависимости от положения полюсов - б
На выводы 1, 2 датчиков Холла ДХ подается постоянное напряжение UДХ от ИПДХ. Резисторы Rl, R2 ограничивают ток IУП, протекающий через ДХ. Значение управляющего тока 1УП для различных вариантов ДХ составляет (3-100) мА.
С выводов 3,4 снимаются импульсы разной полярности uз, u4 в зависимости от положения полюсов магнита ротора (N или S) , рис.5.1,б.
Каждый элемент Холла размещается в герметичном корпусе с четырьмя выводами, рис.5.2,а. Из выходной характеристики элемента Холла, рис.5.2,б видно, что ДХ обладает остаточным напряжением uост при отсутствии магнитного поля, В = 0. Чтобы избавиться от остаточного напряжения применяют схемотехническое решение, рис.5.2,в.

Рис.5.2. Датчик Холла - а, выходная характеристика- б, схема компенсации остаточного напряжения - в
Одним из положительных свойств датчиков Холла является то обстоятельство, что они вырабатывают сигнал только по положению. На сигнал датчика не влияет скорость вращения ротора.
С помощью переменного резистора R, рис.5.2, в, осуществляют настройку ДП, добиваясь такого состояния, при котором uост = 0.
Магнитная чувствительность S датчиков Холла для разных типов колеблется в широких пределах, S = ∆uвых/ ∆В =(0,05 - 10)В/Тл.
Расчет параметрического стабилизатора на кремниевом стабилитроне.
Стабилизатор входит в состав ИПДХ и необходим для работы датчиков Холла.
Стабилизатор состоит из нелинейного сопротивления – кремниевого стабилитрона VD и балластного сопротивления Rб, рис.5.3.
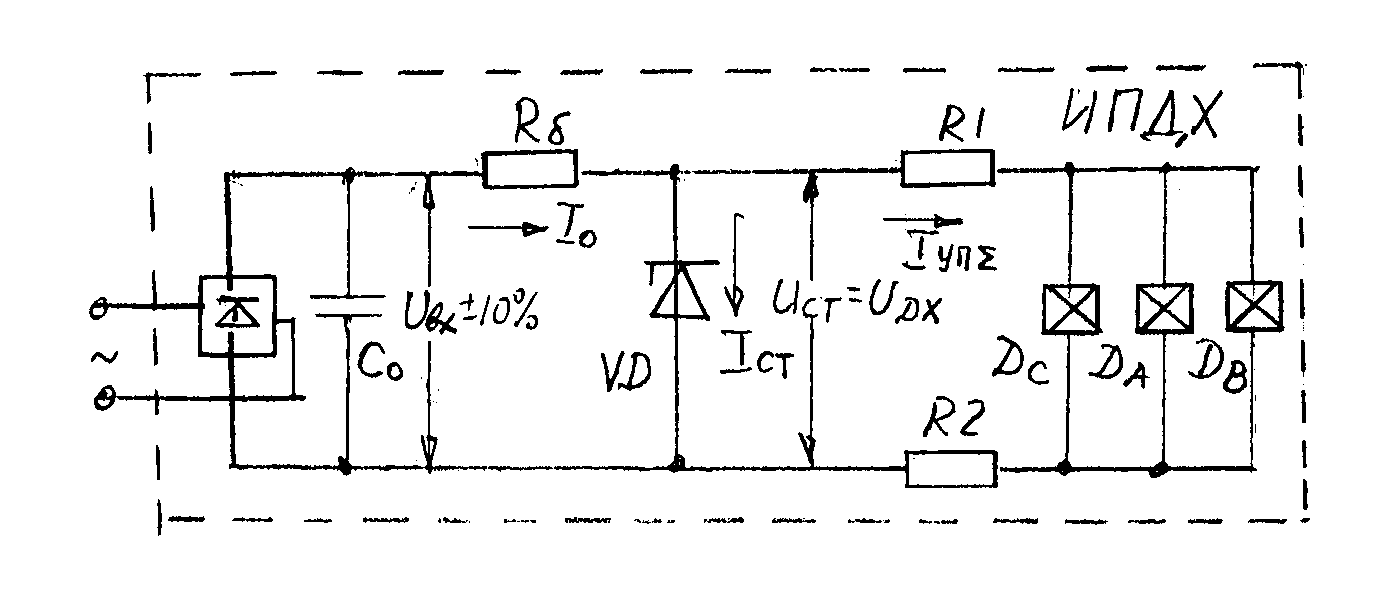
Рис.5.3. Параметрический стабилизатор
на стабилитроне для работы датчиков Холла
На выходе схемы включены три элемента Холла DA, DB, DC с суммарным током нагрузки IУП∑ = 3∙IУП = 3 ∙5 мА = 15 мА. Входное сопротивление элемента Холла R вх = 240 Ом. Для работы ДХ требуется напряжение питания UДХ = Uст = 8 В. Необходимо рассчитать стабилизатор с коэффициентом стабилизации kст ≥ 10 при колебании входного напряжения в пределах ± 10%. Определить значения балластного сопротивления Rб.
Порядок расчета
Выбираем стабилитрон Д814 с параметрами:
- напряжение стабилизации u ст = 8 В;
- ток стабилизации Iст мин = 3 мА, Iст макс = 30 мА.
- динамическое сопротивление rД = 10 Ом
2. Задаемся током стабилизации
Iст ≈ 0,5 Iст макс = 0,5∙30 = 15 мА.
Задаемся падением напряжения на Rб
u Rб = uст = 8 В.
4. Суммарный ток, протекающий через Rб
I0 = I ст + IУП∑ = 15+15 = 30 мА.
5. Балластное сопротивление
 .
.
Напряжение на входе стабилизатора
Uвх = U Rб + Uст = 8 + 8 = 16 В± 10%.
Результирующее сопротивление трех элементов Холла, включенных параллельно
 .
.
Ограничительные резисторы (R1 + R2)
 ,
откуда
,
откуда
 .
.
(R1 + R2) = 533 - 80 = 453 Ом.
Выбираем R1 = R2 = 453/2 = 276 Ом.
Коэффициент стабилизации
 .
.