

4. Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения . Провести линеаризацию неявных формул и записать матричные линейные уравнения.
Составил Воронин А.В.
Зав. кафедрой Малышенко А.М.
УТВЕРЖДАЮ: декан АВТФ Гайворонский С.А.
Экзаменационные билеты по курсу МС для студ. групп 8А51, 8А52, 8250 , 158А51
|
|
ЗБ ТПУ 8.4 8.2/УД.17/2006 – 2007о |
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 15
По дисциплине МОДЕЛИРОВАНИЕ СИСТЕМ
Факультет АВТ
Курс 4
Имитационное и аналитическое моделирование. Сравнительный анализ. С чем связана необходимость построения имитационных моделей. Достоинства и недостатки имитационного подхода.
Суть процедуры численного интегрирования. Классификация методов численного интегрирования. Понятие порядка метода.
3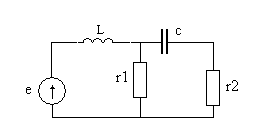 .
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по
нему или иным способом структурную
схему. Выходная переменная цепи – ток
через с.
.
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по
нему или иным способом структурную
схему. Выходная переменная цепи – ток
через с.
.
Рис.1
4 . Для заданного двухзвенного манипулятора расставить оси связанных систем координат по методу Хартенберга.
Записать значения для перехода от нулевой системы к первой.
Рис.2
Составил Воронин А.В.
Зав. кафедрой Малышенко А.М.
УТВЕРЖДАЮ: декан АВТФ Гайворонский С.А.
Экзаменационные билеты по курсу МС для студ. групп 8А51, 8А52, 8250 , 158А51
|
|
ЗБ ТПУ 8.4 8.2/УД.17/2006 – 2007о |
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 16
По дисциплине МОДЕЛИРОВАНИЕ СИСТЕМ
Факультет АВТ
Курс 4
1. Кинематика механизмов. Системы координат. Преобразование систем координат. Однородные координаты, с чем связано использование однородных координат.
2. Моделирование механических систем на графах связей..
3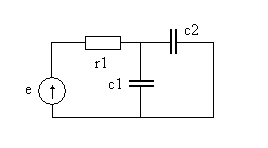 .
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по нему передаточную функцию
методом циклов. Выходная переменная
цепи – напряжение на r1.
.
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по нему передаточную функцию
методом циклов. Выходная переменная
цепи – напряжение на r1.
Рис.1
4. Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения . Провести линеаризацию неявных формул и записать матричные линейные уравнения.
Составил Воронин А.В.
Зав. кафедрой Малышенко А.М.
УТВЕРЖДАЮ: декан АВТФ Гайворонский С.А.
Экзаменационные билеты по курсу МС для студ. групп 8А51, 8А52, 8250 , 158А51
|
|
ЗБ ТПУ 8.4 8.2/УД.17/2006 – 2007о |
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 17
По дисциплине МОДЕЛИРОВАНИЕ СИСТЕМ
Факультет АВТ
Курс 4
Методы не математического моделирования. Их особенности, достоинства и недостатки.
Структурное и мультидоменное моделирование. Особенности задания исходной информации и особенности методов интегрирования.
3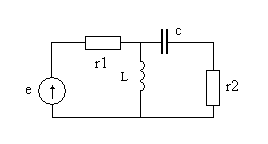 .
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по
нему или иным способом структурную
схему. Выходная переменная цепи – ток
через L.
.
Построить граф связей электрической
цепи, представленной на рисунке 1, и
получить по
нему или иным способом структурную
схему. Выходная переменная цепи – ток
через L.
Рис.1