

3.Регулюючі пристрої серії контур
Прилади регулюючі Р25 призначені для застосування в схемах автоматичного регулювання і управління теплотехнічними процесами в котельних установках малої та середньої потужності та інших теплотехнічних об'єктах.
Вихідні безконтактні ключі пристрою комутують змінний і пульсуючий постійний струм частотою 50Гц з амплітудним значенням до 2А при діючому значенні струму від 0,1 до 2,0А і діючому значенні напруги зовнішнього джерела живлення вихідних ланцюгів не більше 250В, що дозволяє управляти виконавчими механізмами (МЭО-100, МЭО-250) без проміжних пристроїв (пускачі магнітні, реле, підсилювачі, пускачі безконтактні ПБР).
Прилад має додаткові входи для підключення уніфікованих електричних сигналів від 0 до 5мА, від 0 до 20мА, від 0 до 10В постійного струму, призначені для введення коректуючих дій.
Пристрій виконує наступні функції:
- підсумовування сигналів, що поступають від вимірювальних перетворювачів з неуніфікованими (природними) електричними вихідними сигналами, а також коректуючих сигналів постійного струму або напруги, введення інформації про задане значення, формування і посилення сигналу розузгодження;
- формування на виході електричних імпульсів постійного або змінного струму для управління виконавчими механізмами з постійною швидкістю переміщення;
- формування спільно з виконавчим механізмом постійної швидкості пропорційно - інтегрального закону регулювання;
- формування спільно з диференціатором і виконавчим механізмом постійної швидкості пропорційно - інтегральний - диференціального закону регулювання;
- формування двопозиційного і трипозиційного законів регулювання;
- демпфування сигналів розузгодження;
- ручне управління виконавчим механізмом;
- індикація положення виконавчого механізму і сигналу розузгодження;
- індикація виходів.
Прилади випускаються в двох виконаннях: Р25.1.1, Р25.2.1, Р25.3.1 без вбудованого індикатора положення виконавчого механізму; Р25.1.2, Р25.2.2, Р25.3.2 з вбудованим індикатором положення виконавчого механізму.
Залежно від виду приєднуваних до приладу датчиків (виду та номінального діапазону зміни вхідних сигналів) існують такі модифі¬кації приладів.
Модифікація приладу |
Вид та номінальний діапазон зміни вхідних сигналів |
Вид та кількість приєднуваних датчиків |
1
|
Сигнал змінного струму частотою 50 Гц від 0 до 0,5 В (зміна взаємоіндуктивності від 0 до 10 мГн) |
Від одного до трьох диференційно-трансформаторних датчиків
|
2
|
Зміна активного опору на 46 Ом.
|
Один або два термоперетворювачі опору градуювань 50П та 50М; 100П та 100М |
3 |
Зміна ЕРС від 0 до 60 мВ. |
Один термоелектричний перетворювач градуювань ХК68, ХА68, ПП68, ПР-30/668 |
Пристрій виготовляється в прямокутному металевому корпусі і призначено для щитової установки. Всі органи управління пристроєм розташовані на передній панелі. Підключення пристрою до ланцюгів управління і живлення здійснюється за допомогою контактної колодки, розташованої на задній стінці пристрою.
Монтаж, настройку і регулювання пристрою повинні проводити особи, що мають спеціальну підготовку, допуск до експлуатації електроустановок напругою до 1000 В і що вивчили справжній технічний опис і інструкцію з експлуатацій.
Технічні характеристики
Параметр |
Значення |
Імпульси напруги|напруження| постійного пульсуючого струму|току| середнього значення |
24 В |
Імпульси напруги|напруження| постійного струму|току| |
±10 В |
Зміна стану безконтактних ключів|джерел|, що допускають комутацію пульсуючого постійного або змінного струму|току| при діючому значенні до 2А і діючому значенні напруги|напруження| зовнішнього джерела живлення|харчування| вихідних ланцюгів|цепів| |
до 250 В |
Вид|вид| і номінальний діапазон зміни сигналів |
50 Гц, 0...0.5 В 0...10 мГн| |
Вид|вид| і кількість вимірювальних перетворювачів, що підключаються (диференціально – трансформаторних вимірювальних перетворювачів) |
1...3 |
Габаритні розміри блоку, не більше |
120х240х285 мм |
Маса блоку, не більше |
4,4 кг |
Варіант №14
1.Регулятори, які працюють за даним законом, виконують переміщення регулюючого органу пропорційно сумі відхилення та інтеграла від відхилення регульованої величини, тобто здійснюють П- та І- вплив.
Інваріантні системи призначені для об’єктів котрі функціонують в умовах інтенсивних збурень. Інваріантність це часткова або повна залежність будь-якої змінної від збурення, що забезпечується введенням в систему відповідних зв’язків та елементів (компенсаторів). Зобразимо структуру інваріантної АСР:
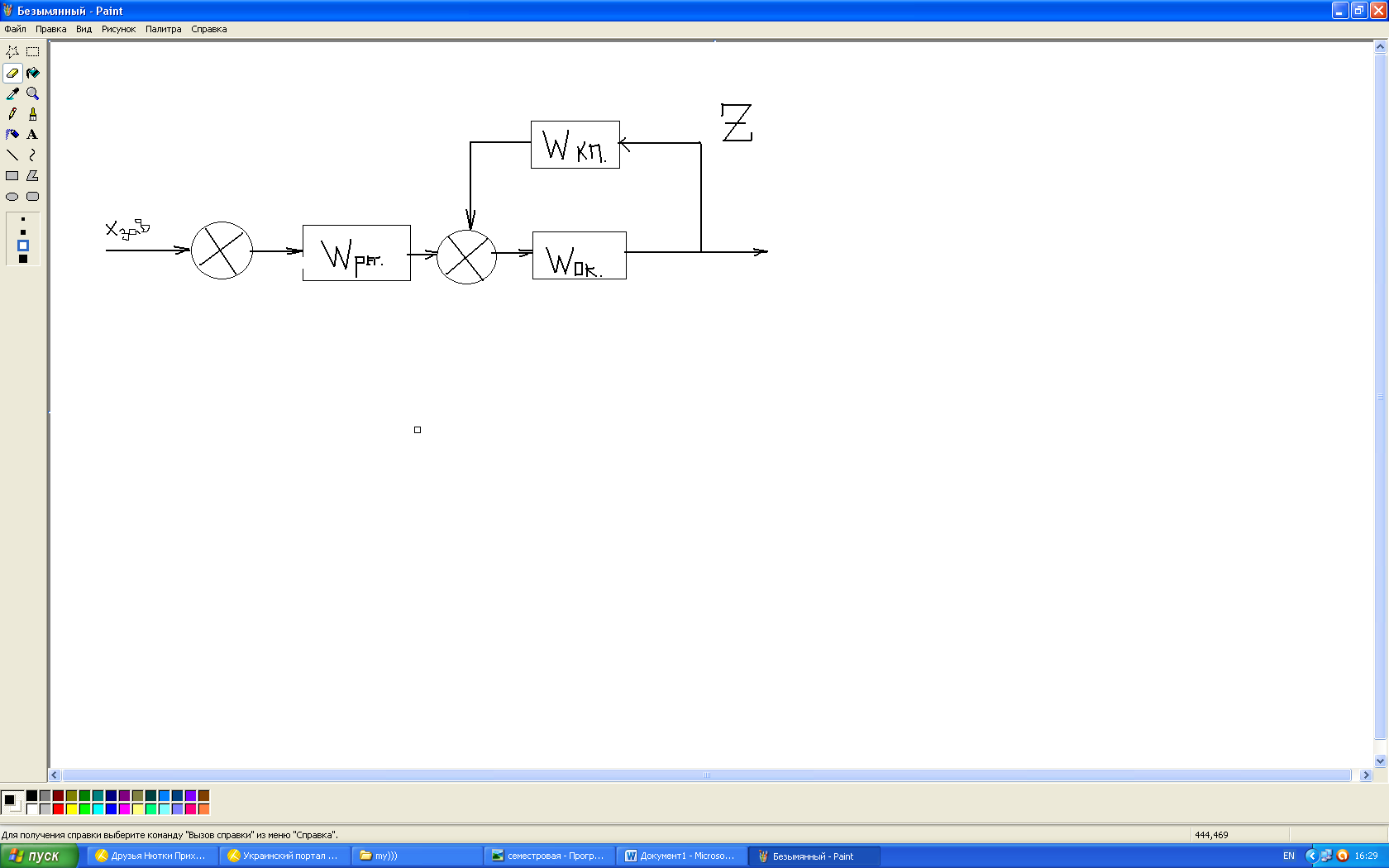
Практична реалізація інваріантних систем стала можливою після формування критеріїв інваріантності. Необхідною але достатньою умовою інваріантності є наявність принаймні 2-ох каналів передачі(розповсюдження) збурення між точками його прикладання і виходу об’єкта.
3.Цифрові системи. В таких системах відбувається перетворення сигналу за часом та за рівнем, тобто в таких системах є пристрої які перетворюють неперервні сигнали, в цифрові коди і виконують математичні операції над цими кодами . В АСР функції регулятора виконують мікропроцесорні контролери; така система відноситься до неперервно-дискретних і описується диф. рів., а також включає функціональні залежності, які відображають перетворення сигналів з неперервної форми в дискретну і навпаки.
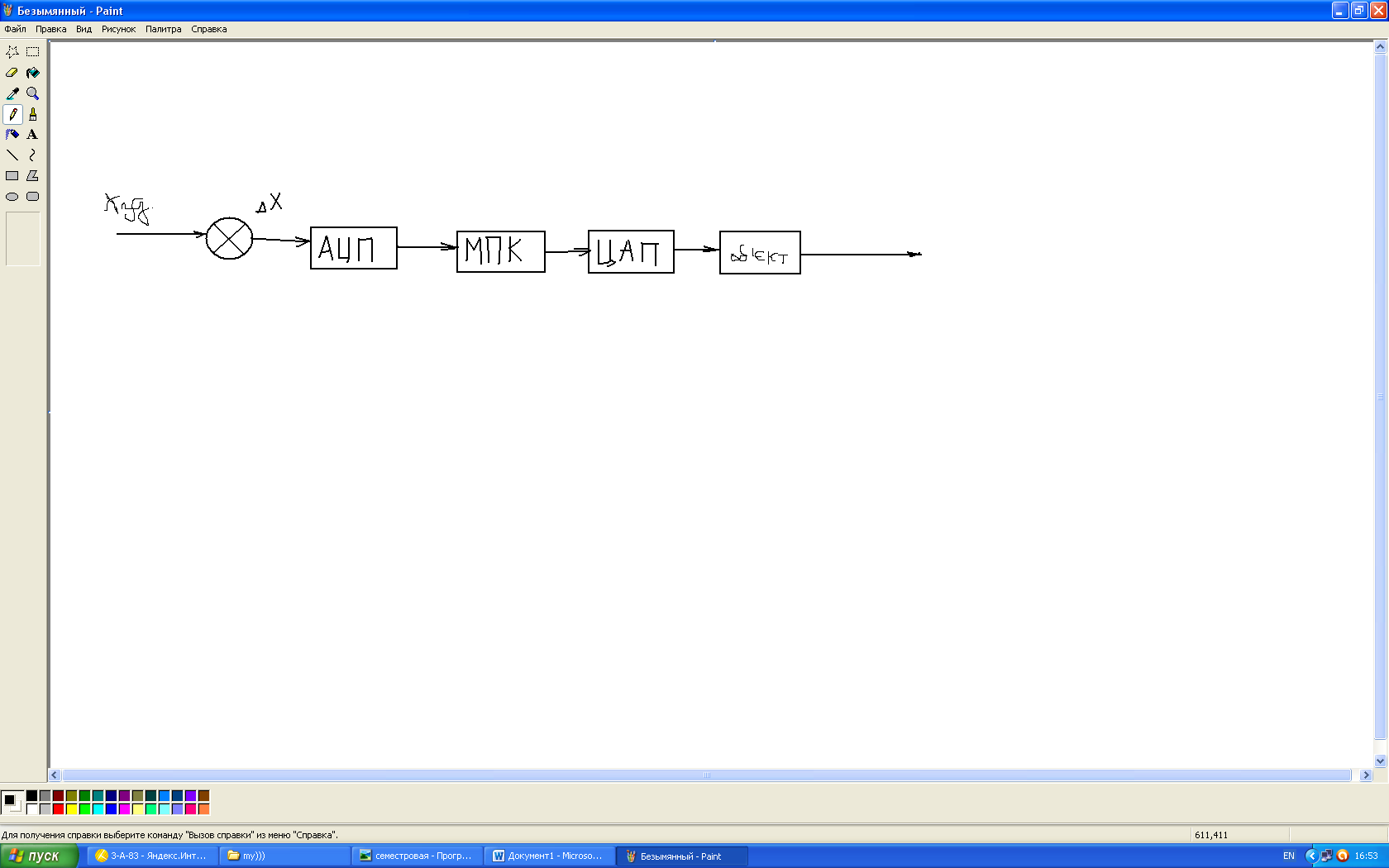
Аналогово-цифровий перетворювач призначений для отримання з неперервного сигналу цифрового коду, який обробляється в мікропроцесорних контролерах. Для формування сигналу керування, котрий поступає на об’єкт необхідно забезпечити зворотнє перетворення.
Білет № 15
1. ПД закон
Пропорціонально-диференціальний (ПД) закон регулювання. Регулятор, що реалізує даний закон регулювання, можна зобразити у вигляді системи, що містить два паралельно працюючих типових ланки: пропорційної та ідеальної диференціюючої.
Позитивною особливістю даного закону є те, що регулювання ведеться з урахуванням як величини відхилення регульованого параметра, так і швидкості його зміни. Чим крутіший фронт відхилення вихідної величини, тим на більшу величину переміщається робочий орган (рис. 1 а). Як тільки припиняється зміна регульованої величини, регулятор починає відпрацьовувати пропорційну частину. Ефект передування значно підвищує якість перехідного процесу.
Підкреслимо, що регулятор, який враховує тільки першу похідну величини відхилення регульованого параметра, неприйнятний, оскільки при швидкості зміни параметра, що дорівнює нулю, він може мати будь-яке стале значення, значно відмінне від заданого. Тому Д-регулятор "в чистому вигляді" не існує.
Uрег=К*дельтаХ+Кд*(d*daeltaX/dt)
2) Для того щоб одержати часову хар-ку (крива розгону) необхідно на систему нанести збурення і з виходу ціеї ланки зняти значення вихідної величини в часі. Цей процес називають ідентифікаціею об’екта. Після отримання кривої розгону є можливість отримати параметри об`кта керування.
1) Для цьго проводять дотичну до графіку.
2) З точки встановленого значення проводять лінію яка паралельна осі абцис.
3) Зточки перетину дотичної та ціеї лінії проводимо перпендикуляр на вісь Х.
Проміжок часу 1, 2 називають часом запізнення (Тау запізнення)
Тау це проміжок часу між початком досліду та зміною вихідної величини. Проміжок часу 2,3 називають стала часу обекта (То) – проміжок часу від початку зміни віхідного сигналу до моменту закінчення експерименту (Хвих= соnst). Коефіціент підсилення обекта Ко – це величина, яка показуе у скільки разів дана ланка підсилює вхідний сигнал. Ко= Хвих/Хвх
3.Застосування елементі впнемо-автоматики сприяє насамперед їх пожежо та вибухо небезпечність, простота конструкції та експлуатації, можливість використання в окремих умовах агресивного перетворювача.
Однак низька швидкодія і порівняно невелика дальність застосування(до 300 метрів), обмежує зону застосування пневматичних пристроїв.
Конструкторами була розроблена уніфікована система пневматичних пристроїв серії «Старт», які складаються з елементів пневмоавтоматики «УСЕППА»(Універсальна система елементів промислової пневматики). Ця система містить такі елементи:
Пневмоопори(постійні, змінні, керуючі)
Пневмопідсилювачі
Пневмоємності
Пневмореле
За датчик
Кнопки
Тумблери.
Ці елементи які утворюють пневматичні пристрої, монтуються на платі з органічного складу зв’язок між елементами здійснюється крізь канали у платі.
Варіант №16
1.Пропорційно – інтегрально – диференційний закон – це комбінований закон, який складається з 3 аналогових законів керування. Відповідно це: пропорційний, інтегральний і диференціальний закон. В цьому законі спочатку відпрацьовується Д складова, потім П, а потім І складова! ПІД закон:
В такому регуляторі переміщення регулюючого органу в кожен момент часу пропорційне швидкості відхилення вхідного сигналу, пропорційне відхиленню вхідної величини та швидкість переміщення регулюючого органу в кожен момент часу прямо пропорційне відхиленню вхідної величини.
Диф. р-ння:
Часова характеристика: