

3.Мікропроцесорні засоби автоматизації серії «Мікрол».
Фірма «Мікрол» випускає такі мікропроцесорні регулятори:
МИК-12, МИК-2, МИК-21, МИК-22, МИК-25, МТР-8, МТР-44.
Мікропроцесорні індикатори: ИТМ-1, ИТМ-2, ИТМ-11, ИТМ-10, ИТМ-12, ИТМ-20 і т.д.
Мікропроцесорні контролери: МИК-51, МИК-51Н, МИК-52, МИК-52Н.
Охарактеризуємо деякі з цих засобів автоматизації:
МИК-12: Універсальний одноканальний аналоговий або імпульсний ПІД-регулятор . Вимірювання, контроль і автоматичне регулювання одного технологічного параметра (температура, тиск, витрата, рівень і т.п.)
Входные аналоговые сигналы: 0-5мА (Rвх=400 Ом), 0(4)-20 мА (Rвх=100 Ом), 0-10В (Rвх=25кОм)
- Входные сигналы от термопреобразователей сопротивления: ТСП 50П, 100П, гр.21, ТСМ 50М, 100М, гр.23
- Входные сигналы от термопар: ТХК(L), ТХА(K), ТПП(S), ТПР(B), ТВР (A), ТЖК(J), ТХКн(E)
МИК-21:
Призначені для автономного і комплексного використання в АСУТП в енергетиці, металургії, хімічній, харчовій та інших галузях промисловості і народному господарстві. Робота з уніфікованими сигналами, термоперетворювачами опору ТСП 50П, 100П, гр.21, діапазон вимірюваних температур від -50 ... +650 ° С, ТСМ 50М, 100М, гр.23 (від -50 ... +200 ° С), термопарами ТХА (К), ТХК (L).
ИТМ-10: Індикатор технологічний мікропроцесорний ІТМ-10. Робота з уніфікованими сигналами, термоперетворювачами опору, термопарами
Кількість каналів вимірювання: 1
Вхідні сигнали: - 0-5мА (Rвх = 400 Ом), 0 (4) -20 мА (Rвх = 100 Ом), 0-10В (Rвх = 25кОм) - ТСП 50П, 100П, гр.21 ТСМ 50М, 100М, гр.23, ТХК (L), ТХА (K), ТПП (S), ТПР (B), ТВР (A), ТЖК (J), ТХКн (E)
Варіант№9
1.Диференційний закон регулювання. Д- регулятори. Часові характеристики, передаточна функція, недоліки та переваги.
Диференційний закон- в такому регуляторі переміщення регулюючого органу в кожен момент часу пропорційне швидкості відхилення вхідного сигналу.
W(p)= Кд*р. Окремо диференційних регуляторів не існує.
Часова характеристика:
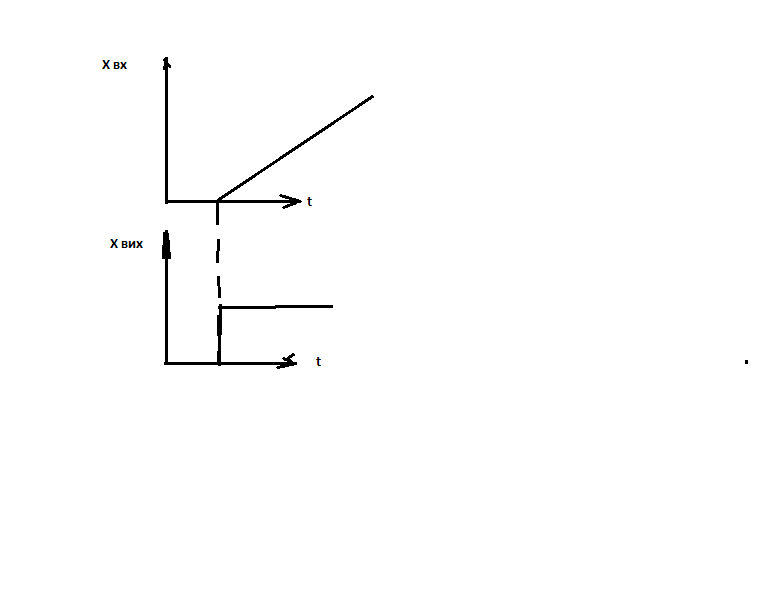
Тд- час диференціювання(час попередження) Тд=Кд.(параметр настройки).
2.Методика вибору регулятора.
Для того, щоб правильно обрати регулятор треба визначити часову характеристику об’єкта регулювання.
Більшість об’єктів керування характеризуються наступними параметрами:
Стала часу То, запізнення t, відношення T/t. Знання цих величин необхідне для вибору закону керування.
Якщо коефіцієнт відношення t/To буде в межах від 0,2до 1- то обирається неперервний закон керування(П,ПІ,ПІД).
Якщо t/To буде менше ніж 0,2,то обираємо релейний регулятор.
Якщо t/To ,більше одиниці, то обираємо імпульсний регулятор.
3.Функціональні та обчислювальні блоки системи «старт».
Застосуванню елементів пневмоавтоматики сприяє насамперед їх пожежо та вибухо-безпечність, простота конструкції та експлуатації, можливість використання в окремих умовах агресивного середовища. Однак низька швидкодія і порівняно невелика дальність застосування(до 300 м.) обмежує зону застосування пневматичних пристроїв. Конструкторами була розроблена уніфікована система пневматичних приладів серії «СТАРТ», які складаються з елементів пневмоавтоматики «УСЕППА».
Ця система містить такі елементи:1) пневмоопори( постійні, змінні керуємі, пневмоємності, пневмопідсилювачі(трьох та п’яти мембранні елементи порівняння), пнемо-реле, задатчіки, кнопки і т.д.Регулятори системи системи «СТАРТ» за допомогою штекерного роз’ємну монтують на вторинних приладах системи «СТАРТ».Технічні характеристики пристроїв комплексу «СТАРТ»:
Пристрій алгебраїчного додавання : ПФ1.1 – алгебраїчне додавання трьох пневматичних сигналів, два з яких зі знаком «+» і один зі знаком «-«.
Пристрій витягання квадратного кореню: ПФ1.17
Пристрій множення на постійний коефіцієнт ПФ 3.9
Регулятор пропорційний ПР1.5
Регулятор позиційний ПР1.6.
Регулятор пропорційний ПР2.5.
Регулятор пропорційний ПР2.8.
Регулятор пропорційно-інтегральний ПР3.21