

2.Методика вибору регулятора.
Для того, щоб правильно обрати регулятор треба визначити часову характеристику об’єкта регулювання.
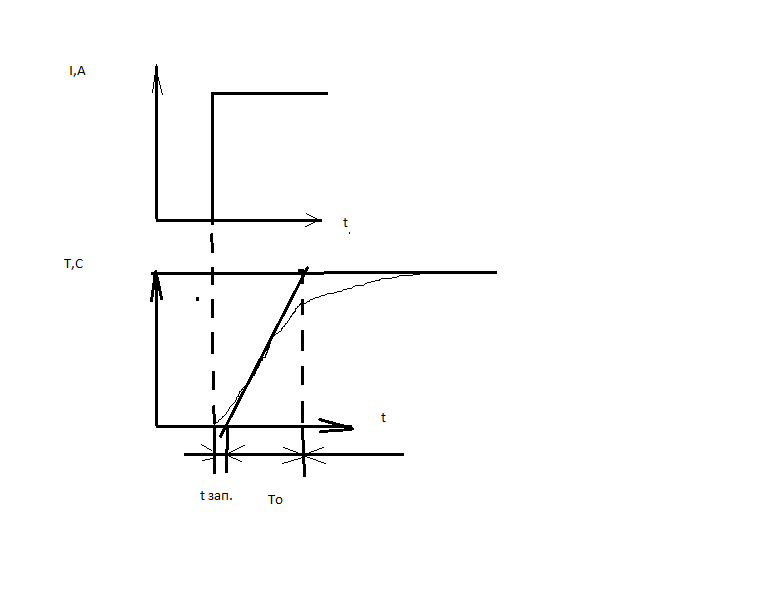
Більшість об’єктів керування характеризуються наступними параметрами:
Стала часу То, запізнення t, відношення T/t. Знання цих величин необхідне для вибору закону керування.
Якщо коефіцієнт відношення t/To буде в межах від 0,2до 1- то обирається неперервний закон керування(П,ПІ,ПІД).
Якщо t/To буде менше ніж 0,2,то обираємо релейний регулятор.
Якщо t/To ,більше одиниці, то обираємо імпульсний регулятор.
3.Мікропроцесорні регулюючі пристрої. Загальна характеристика.
Реміконт Р-130 – це малоканальний, багатофункціональний мікропроцесорний контролер, який призначений для автоматичного регулювання і логічного керування технологічними процесами в різних галузях. Існує 3 моделі Р-130:1)регулююча2)логічна3)безперервно-дискретна.Регулююча модель призначена для вирішення завдань автоматичного регулювання, дає змогу виконувати локальне , каскадне, багатозвязане та програмне керування. За допомогою цієї моделі можна реалізувати до 4-х контурів незалежного керування. В моделі вміщується 76 алгоритмів, які зашиті в ПЗП. До них входять ПІД-регулювання, математичні,динамічні, нелінійні, аналогово-дискретні та логічні перетворення. Крім того є 99 алгоблоків з можливістю вільного ї заповнення різними алгоритмами з бібліотеки.
Логічна модель призначена для реалізації логічних програм покрокового керування, дає змогу формувати програми з аналізом умов виконання кожного кроку та здійснювати умовний або безумовний перехід. За допомогою цієї моделі можна реалізувати чотири незалежних логічних програм покрокового керування, кожна з яких мможе бути лінійною або розгалуженою з безумовним переходом.
Безперервно дискретна модель призначена для вирішення завдань регулювання та логічних завдань і дає змогу виконувати різноманітні перетворення як аналогових так і дискретних сигналів. За допомогою цієї моделі можна реалізувати одну логічну програму крокового керування( 9 кроків), а також має 4 контура аналогового керування або 8 контурів імпульсного.
Варіант №8
Інтегральний закон регулювання. І-регулятори. Часові характеристики, передаточна функція, недоліки та переваги.
Інтегральний закон – в такому регуляторі швидкість переміщення регулюючого органу в кожен момент часу прямо пропорційне відхиленню вхідної величини. W(p)=Кінт/р.
Часова характеристика:
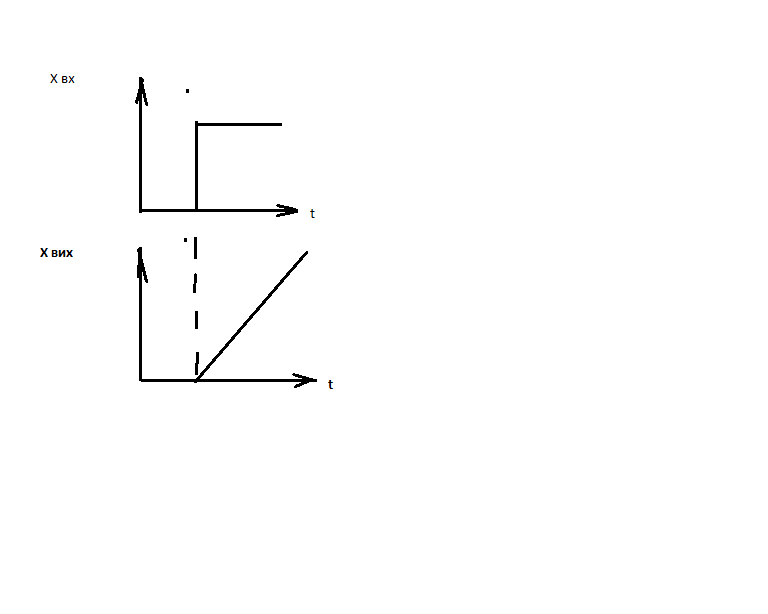
Ті=1/Кінт. Ті – час інтегрування, або час ізодрому. Окремо І-регуляторів не існує.
2.Оптимальні системи автоматичного керування. Загальні положення.
Оптимізація – це цілеспрямована дія, яка направлена на досягнення найкращого результату за існуючих умов, вимог або обмежень. В автоматизованих системах оптимальне керування можна отримати у вигляді: 1) оптимальної програми заданої в певному проміжку часу. Така система буде розімкненою, тому реальний стан параметрів буде відрізнятися від розрахункових в зв’язку з наявністю неконтрольованих збурень та неточностями математичних моделей. Оптимальної стратегії, коли оптимальне керування задається як функція фазових координат та вхідного сигналу, а система є замкненою. В цьому випадку зберігаються всі переваги системи, які побудовані за принципом зворотнього зв’язку.Тау класична постановка задач оптимального керування формується наступним чином: існує нескінчення множина допустимих керувань, які переводять об’єкт з початкового стану в кінцевий при введених або об’єктивно існуючих обмеженнях, але в той же час серед допустимих керувань є лише одне оптимальне, яке приводить до найкращого результату.