

3)Вторинні прилади системи старт
ВВП призначенні для контролю та запису різних технологічних параметрів,величини яких перетворені в стандартний діапазон вимірювання пневматичного сигналу
Для вимірювання системи ВВП запропоновано компенсаційний принцип вимірювання ,при якому зусилля на прийомному елементі (що виникає від вхідного тиску зрівноважується зусиллям елемента 3.3
Самописуючі пневматичні прилади обладнанні електричним(Є0або пневматичним (п)приводами діаграмою стрічки. Типи:Пв3.2 ;2.2;4.4э;4.2э;4.3э; ППВ1.1 Пкр-1 ПКР-2 ПК1.3 ПВ1.3 РПВ4.2э РПВ4.3э ПВ10.2э
Вариант 5
1)ПД закон
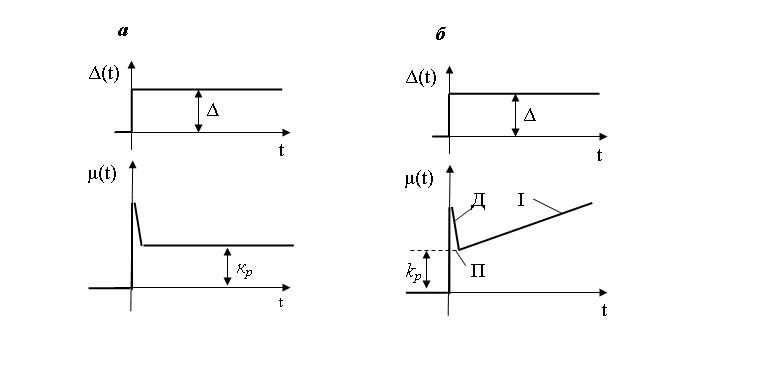
Пропорціонально-диференціальний (ПД) закон регулювання. Регулятор, що реалізує даний закон регулювання, можна зобразити у вигляді системи, що містить два паралельно працюючих типових ланки: пропорційної та ідеальної диференціюючої.
Позитивною особливістю даного закону є те, що регулювання ведеться з урахуванням як величини відхилення регульованого параметра, так і швидкості його зміни. Чим крутіший фронт відхилення вихідної величини, тим на більшу величину переміщається робочий орган (рис. 1 а). Як тільки припиняється зміна регульованої величини, регулятор починає відпрацьовувати пропорційну частину. Ефект передування значно підвищує якість перехідного процесу.
Підкреслимо, що регулятор, який враховує тільки першу похідну величини відхилення регульованого параметра, неприйнятний, оскільки при швидкості зміни параметра, що дорівнює нулю, він може мати будь-яке стале значення, значно відмінне від заданого. Тому Д-регулятор "в чистому вигляді" не існує.
Uрег=К*дельтаХ+Кд*(d*daeltaX/dt)
2. Для того щоб одержати часову хар-ку (крива розгону) необхідно на систему нанести збурення і з виходу ціеї ланки зняти значення вихідної величини в часі. Цей процес називають ідентифікаціею об’екта. Після отримання кривої розгону є можливість отримати параметри об`кта керування.
1) Для цьго проводять дотичну до графіку.
2) З точки встановленого значення проводять лінію яка паралельна осі абцис.
3) Зточки перетину дотичної та ціеї лінії проводимо перпендикуляр на вісь Х.
Проміжок часу 1, 2 називають часом запізнення (Тау запізнення)
Тау це проміжок часу між початком досліду та зміною вихідної величини. Проміжок часу 2,3 називають стала часу обекта (То) – проміжок часу від початку зміни віхідного сигналу до моменту закінчення експерименту (Хвих= соnst). Коефіціент підсилення обекта Ко – це величина, яка показуе у скільки разів дана ланка підсилює вхідний сигнал. Ко= Хвих/Хвх
3)РелЕйні системи
в управлінні, автоматична система управління, в якій є хоча б одна ланка, що володіє релейного характеристикою (Див. Релейний характеристика). Р. з. є одним з видів нелінійних дискретних автоматичних систем управління. Розрізняють двопозиційні (див. Двопозиційний регулятор) і багатопозиційні Р. с. Принципова особливість двохпозиційних Р. с. - Наявність у них автоколивань вихідного (регульованого) параметра в сталому режимі (тобто після закінчення перехідних процесів (Див. Перехідні процеси)); амплітуда і період автоколивань визначаються релейного характеристикою застосовуваного релейного елемента (Див. Релейний елемент), а також динамічними характеристиками об'єкта управління, виконавчих механізмів, вимірювальних і перетворюючих пристроїв, що входять в автоматичну систему управління. Р. з. відносно прості у виготовленні і експлуатації, мають низьку вартість; використання безконтактних релейних елементів підвищує надійність системи. Р. з. широко застосовують при управлінні різними технологічними процесами.
Варіант 6
1.Пропорційно – інтегрально – диференційний закон – це комбінований закон, який складається з 3 аналогових законів керування. Відповідно це: пропорційний, інтегральний і диференціальний закон. В цьому законі спочатку відпрацьовується Д складова, потім П, а потім І складова! ПІД закон:
В такому регуляторі переміщення регулюючого органу в кожен момент часу пропорційне швидкості відхилення вхідного сигналу, пропорційне відхиленню вхідної величини та швидкість переміщення регулюючого органу в кожен момент часу прямо пропорційне відхиленню вхідної величини.
Диф.
р-ння:

Часова характеристика:

2. В залежності від динамічних властивостей обекти керування можна поділити:
1) За числом ємностей – на одно- або багатоємнісні обекти, тому що кожна з них вимагає створення контурів вимірювання або регулювання.
2) за розподілом параметрів у просторі поділяють на обекти з розподіленими та зосередженими параметрами. В статичних режимах ці значення чітко розподіляються вздовж просторової кординати.
3) За зміною характеристик в часі. Поділяють на стаціонарні та нестаціонарні обекти. Реальні обекти являються нестаціонарними, тобто змінюютьсвої хар-ки з часом в процесі експлуатації.
3. ІЗОДРОМ 1 та ІЗОДРОМ 2 це сучасні аналоги Р25.1 та Р25.2
Р25.1 працює датчикми, що мають вихідний сигнал взаемоіндуктивності, диференційно трансформаторної передачі -10;0;10 мГн . Можна підєднати до трьох датчиків. До виходу підеднуеться лише один виконавчий механізм. Р25.1.1 та Р25.1.2 відрізняються лише наявністю вбудованого індикатора положення виконавчого механізму.
Р25.2 прцюе з датчиками температури – термометрами опору, є можливість підєднання до двох термометрів опору різних градуювань. Р25.2.1, Р25.2.2 відрізяються наявністю вбудованого індикатора положення виконавчого механізму.
Р 25.3 працюе з термоелектричним перетворювачем, підєднуеться лише один датчик.
Варіант №7
1.Пропорційний закон регулювання. П-регулятори. Часові характеристики, передаточна функція, недоліки та переваги.
П-закон, такий П-закон відпрацьовує пропорційний регулятор, тобто переміщення регулюючого органу в кожен момент часу пропорційне відхиленню вхідної величини. Диф.рівняння: Uрег.=kΔX, де ΔХ=Хзд-Хдат.
Передаточна функція:W(p)=Uрег./ ΔХ=K, де k- коеф.підсилення.
Часова характеристика:
К – параметр настройки регулятора. Приклад регуляторів: ПР 2.5; ПР2.8.