

3.Регулятори системи «старт». Типи, призначення, характеристики.
Система «СТАРТ» склаается з певматичнах елементів «УСЕППА» Регулятори системи «СТАРТ» за допомогою штекрного роз’єму монтуются на вторинні прилади системи «СТАРТ» .Регулятор може бути налаштований як на прямий так і на зворотній напрямок дії.
Пристрої:
Регулятор позиційний ПР1.5 –двохпозиційне регулюванняпараметру від заданого значення. Зона нечутливості+- 1%
Регулятор позиційний зі змінною зоною нечутливості ПР1.6 – двохпозиційне регулювання,діапазон зони нечутливості = 10-80%
Регулятор пропорційний ПР2.5 – П-закон регулювання ,немає вбудованого задатчика
Регулятор пропорційний ПР2.8 – П- закон регулювання ,має вбудований задатчик
Регулятор пропорційно-інтегральний ПР3.21- ПІ-закон, без задатчика
Регулятор пропорційно-інтегральний ПР3.31 – ПІ-закон,має вбудований задатчик
Регулятор ПР3.33 – ПІ-регулятор співвідношеннядвоз параметрів
Регулятор ПР3.34 – ПІ-регулятор співвідношення двох параметрів з корекцією по третьому параметру
Регулятор ПР3.35 – ПІД-регулятор
4 Вариант
1.
Пропорціонально-інтегральній
(ПІ)
закон
регулювання.
Регулятори,
які
Працюють
за
данім
законом,
виконують
переміщення
регулюючого
органу
пропорціонально
сумі
відхілення
та
інтеграла
від
відхілення
регульованої
величини,
тобто
здійснюють
П-та
І-Вплив:![]() ,
Реалізовується
ізодромнім
або
ПІ-регулятором
з
параметрами
налаштування
К1
та
,
Реалізовується
ізодромнім
або
ПІ-регулятором
з
параметрами
налаштування
К1
та![]()
ПИ-регулятор. Передаточная функция :
W(p)= K(1+1/Tи*s) или W(p)= K+1/Tи*s;
Где - Tи – постоянная интегрирования (время изодрома).
K – коэффициент пропорциональности
У дінамічному відношенні ПІ-регулятор подібній сістемі з двох паралельно включених регуляторів: пропорційного з коефіцієнтом передачі К1 та інтегрального з коефіцієнтом передачі К2.
Реалізовується ПІ-закон за допомог Гнучкий зворотньому зв'язку.
Наявність
Гнучкий зворотньому зв'язку віключає
залішкову нерівномірність у перехідному
процесі (рис. 1 б). У залежності від
дінамічніх властівостей об'єкта
регулювання и настроювальніх параметрів
регулятора перехідній процес Може буті
аперіодічнім (крива 1) або затухаючім
колівальнім (крива 2). У Першому випадка
зростає амплітуда перерегулювання,
альо скорочується трівалість перехідного
процесу, у іншому - картина Зворотна.
2) Основные показатели качества регулирования
До автоматичним системам регулювання пред'являються вимоги не тільки стійкості процесів регулювання у всьому діапазоні навантажень на об'єкт. Для працездатності системи не менш необхідно, щоб процес автоматичного регулювання здійснювався при забезпеченні певних якісних показників. Такими показниками є:
1). Помилка регулювання (статистична або середньоквадратна складові).
2). Час регулювання.
3). Перерегулювання.
4). Показник тієї, що коливає.(колебательности)
5). Динамічний коефіцієнт регулювання, який визначається з формули
де сенс величин Y1 і Y0 ясний з рис. 2.5.
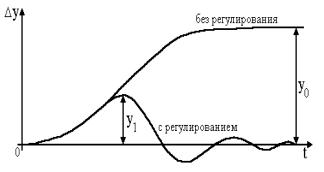
Рис. 2.5. До поняття динамічного коефіцієнта регулювання.
Величина
![]() характеризує
ступінь впливу регулятора на процес,
тобто ступінь пониження динамічного
відхилення в системі з регулятором і
без нього.
характеризує
ступінь впливу регулятора на процес,
тобто ступінь пониження динамічного
відхилення в системі з регулятором і
без нього.
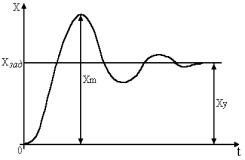
Рис. 2.6. Графік відпрацювання ступінчастого сигналу завдання.
Величина перерегулювання залежить від виду відпрацьовується сигналу. При відпрацюванні ступінчастого впливу за сигналом завдання величина перерегулювання визначається за формулою
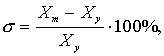
де
значення величин
![]() і
і![]() показані на рис.2.6.
показані на рис.2.6.
При відпрацюванні збурюючої дії, величина перерегулювання визначається зі співвідношення
де
значення величин
і
![]() показані
на рис. 2.7.
показані
на рис. 2.7.
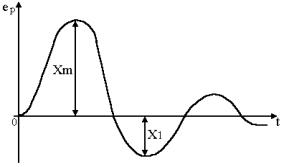
Рис. 2.7. Графік перехідного процесу при відробітку обурення.
Час
регулювання - це час, за який регульована
величина в перехідному процесі починає
відрізнятися від сталого значення
менше, ніж на заздалегідь задане значення
- точність регулювання. Звичайно
приймається, що
![]() від величини стрибка по сигналу завдання.
Настройки регулятора необхідно вибирати
так, щоб забезпечити мінімально можливе
значення загального часу регулювання,
або мінімальне значення першої напівхвилі
перехідного процесу. У безперервних
системах з типовими регуляторами цей
час буває мінімальним при так званих
оптимальних аперіодичних перехідних
процесах. Подальшого зменшення часу
регулювання до абсолютного мінімуму
можна досягти при використанні спеціальних
оптимальних по швидкодії систем
регулювання.
від величини стрибка по сигналу завдання.
Настройки регулятора необхідно вибирати
так, щоб забезпечити мінімально можливе
значення загального часу регулювання,
або мінімальне значення першої напівхвилі
перехідного процесу. У безперервних
системах з типовими регуляторами цей
час буває мінімальним при так званих
оптимальних аперіодичних перехідних
процесах. Подальшого зменшення часу
регулювання до абсолютного мінімуму
можна досягти при використанні спеціальних
оптимальних по швидкодії систем
регулювання.
У деяких САР | спостерігається помилка, яка не зникає навіть після закінчення тривалого інтервалу часу - це статична помилка регулювання. Дана помилка не повинна перевищувати деякої наперед заданої величини.
У регуляторів з інтегральної помилки в сталому стані теоретично рівні нулю, але практично незначні помилки можуть існувати із-за наявності зон нечутливості в елементах системи.
Показник тієї, що коливає M характеризує величину максимуму модуля частотної передавальної функції замкнутої системи (на частоті резонансу) і, тим самим, характеризує коливальні властивості системи. Показник тієї, що коливає наочно ілюструється на графіку рис. 2.8.
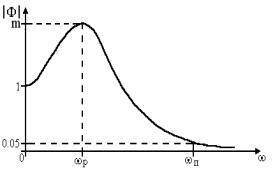
Рис.2.8. Графік модуля частотної передавальної функції замкнутої системи.
Умовно вважається, що значення є оптимальним для промислових САР, тому що в цьому випадку забезпечується в районі від 20% до 40%. При збільшенні M коливає в системі зростає.
У деяких випадках нормується смуга пропускання системи, яка відповідає рівню посилення в замкнутій системі 0,05. Чим більше смуга пропускання, тим більше швидкодія замкнутої системі. Однак при цьому підвищується чутливість системи до шумів в каналі вимірювання і зростає дисперсія помилки регулювання.