

Інтегральний закон регулювання. І-регулятори. Часові характеристики, передаточна функція, недоліки та переваги.
В такому регуляторі швидкість переміщення регулюючого органу в кожен момент часу пропорційне відхиленню вхідної величини.
Uрег=Кінт![]()
W(p)=![]()
Окремо інтегральних регуляторів не існує
Мікропроцесор. Загальна структура та характеристики.
Мікропроце́сор (англ. microprocessor) — інтегральна схема, яка виконує функції центрального процесора (ЦП) або спеціалізованого процесора.
Одним із перспективних напрямів розвитку технічних засобів автоматизації є використання мікропроцесорів (МП), основою побудови яких є програмовані великі інтегральні схеми (ВІС).
Можливість перепрограмування МПповністю змінила підхід до створення електронних пристроїв, бо дозволила на базі уніфікованих апаратних засобів створювати пристрої різного функціонального призначення за рахунок зміни алгоритму обробки даних шляхом перепрограмування. Поряд з цим використання в технічних засобах автоматизації МП дає можливість створювати пристрої з великою швидкодією та підвищеною надійністю при низькій вартості та енергомісткості.
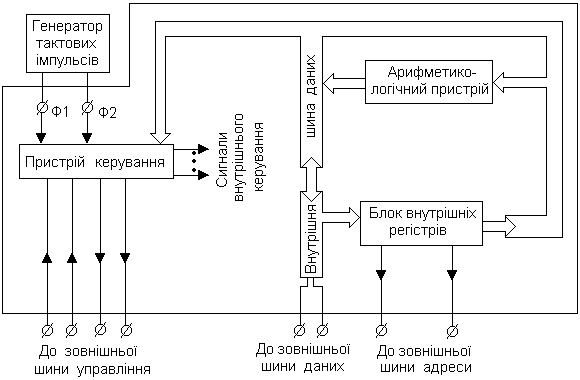 Структурна
схема універсального МП
Структурна
схема універсального МП
Центральною частиною мікропроцесора є арифметико-логічний пристрій, що виконує за командами пристрою керування найпростіші арифметичні і логічні операції над даними: сумування, віднімання, пересилання, зсув, логічне додавання (ИЛИ), логічне множення (И), додавання по |2|.
 Пристрій керування
управляє роботою арифметико-логічного
пристрою та блоком внутрішніх регістрів
(БВР), який є внутрішньою пам’ятю
мікропроцесора, і призначений для
тимчасового зберігання даних та команд,
а також виконує деякі операції обробки
інформації. За сигналами пристрою
керування відбувається вибирання і
виконання кожної нової команди. Окремі
частини мікропроцесора з’єднуються
між собою за допомогою внутрішньої шини
даних. Зовнішній зв’язок
мікропроцесора реалізується за допомогою
зовнішніх шин (управління, адреси і
даних).
Пристрій керування
управляє роботою арифметико-логічного
пристрою та блоком внутрішніх регістрів
(БВР), який є внутрішньою пам’ятю
мікропроцесора, і призначений для
тимчасового зберігання даних та команд,
а також виконує деякі операції обробки
інформації. За сигналами пристрою
керування відбувається вибирання і
виконання кожної нової команди. Окремі
частини мікропроцесора з’єднуються
між собою за допомогою внутрішньої шини
даних. Зовнішній зв’язок
мікропроцесора реалізується за допомогою
зовнішніх шин (управління, адреси і
даних).
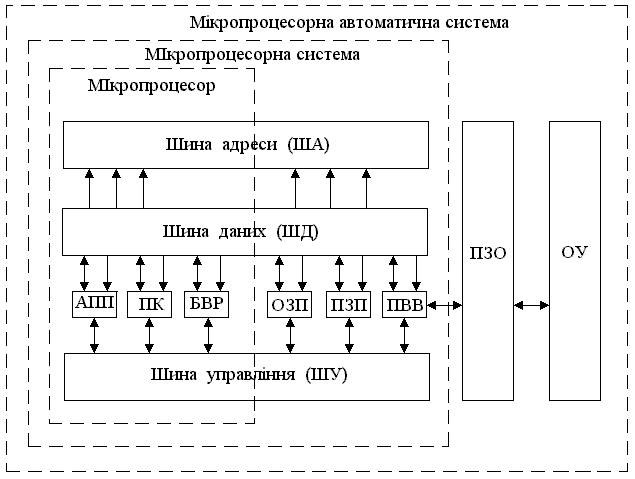
Мікропроцесор, незважаючи на його універсальність, ще не здатний реалізувати конкретне завдання обробки інформації і керування об’єктом. Для виконання цих функцій треба його з’єднати з деякими пристроями, запрограмувати та забезпечити обмін інформації мікропроцесора з цими пристроями, тобто утворити мікропроцесорну систему (МПС).
МПС – це сукупність взаємопов’язаних пристроїв, яка включає один або декілька мікропроцесорних систем, пам’ять (ОЗП і ПЗП), пристрій вводу виводу (ПВВ) та ряд інших пристроїв, які призначені для виконання деяких чітко окреслених функцій з обробки інформації і управління процесом цієї обробки.
Комплекс технічних засобів, який реалізує функцію пам’яті називають запам’ятовуючим пристроєм (ЗП).
Електричні регулюючі пристрої (регулятори серії рт та тм).
Регулятори серії РТ- це одно або багатоканальні вимірювальні регулятори, які працюють з термоперетворювачами, термопарами або з уніфікованими вхідними сигналами. Використовуються для автоматизації технологічних процесів та регулювання різних параметрів. Можлива робота регуляторів сумісно з ПК(RS-232, RS-485).
Можливо створити мережу до 256 точок. Вихідні контакти реле витримують до 10ампер, також використовують малопотужні односимісторні та однотранзитсторні контактию
Ці регулятори мають можливість архівування результатів вимірювання.
Датчики 50М, 100М, 50П, 100П.
Мають цифрову індикацію та модифікації:
2х, 4х та 8-канальних регуляторів
2х-позиційний,3х та ПІД закони.
Мають можливість сигналізації.
Призначені для автоматизації процесів підтримання заданих параметрів в системах вентиляції, опалення та кондеціонування. Дозволяють здійснювати двох або трьохпозиційне ретельно-імпульсне регулювання.
ВАРІАНТ №29