

Показники якості
Основними прямими показниками якості регулювання є наступні:
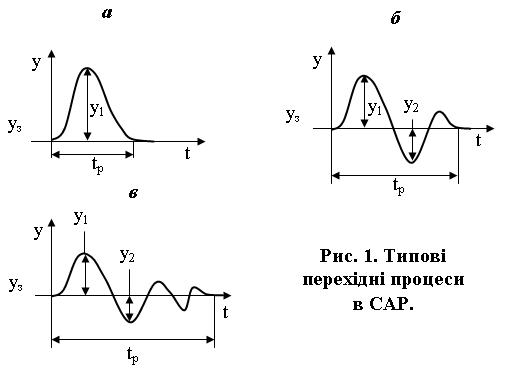
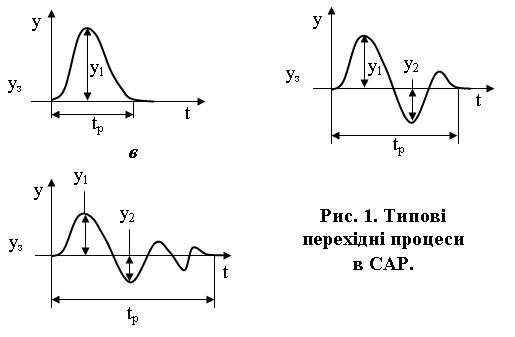
Максимальне динамічне відхилення. Це найважливіший показник якості перехідного процесу, являє собою максимальну амплітуду відхилення вихідного параметра (y1, рис. 1). Найбільшим відхиленням у збіжному перехідному процесі буде перше відхилення, яке безпосередньо іде за збуренням.
Залишкове відхилення. Цей показник називають ще залишковою нерівномірністю. Характеризує величину відхилення регульованої величини від заданого значення по закінченні перехідного процесу. Залишкове відхилення характерне при застосуванні П-регулятора. Залежить від навантаження на об'єкт, його динамічних властивостей і настроювальних параметрів регулятора. (Див. Пропорційний закон регулювання).
Час регулювання. Це проміжок часу tр (рис. 1) від моменту надходження на вхід ступінчастого впливу (завдання, збурення) до моменту, коли відхилення регульованої величини від заданого значення стає меншим деякого відносно малого числа δ (зона нечутливості регулятора). Прийнято вважати, що перехідний процес закінчиться в той момент часу, починаючи з якого, відхилення регульованої вели¬чини відрізняється від сталого значення не більш ніж на 5%.
Перерегулювання – максимальне відхилення у2 керованої величини від нового заданого значення в бік, протилежний від початкового значення. У тих випадках, коли керована величина наближається до нового значення тільки з одного боку пере регулювання відсутнє (рис. а).
Квадратичний інтегральний критерій якості характеризує сумарну площу, обмежену кривою перехідного процес.
3) Краткое описание особенностей работы прибора.
Регулятор универсальный микропроцессорный "Контур" предназначен для решения разнообразных задач технического регулирования.
"Контур" – это гибко программируемый одно- или двухконтурный регулятор для стабилизации или отслеживания различных технологических параметров. "Контур" может использоваться, как позиционный, так и ПИД-регулятор с релейным или аналоговым (токовым) выходом.
"Контур" может осуществлять регулирование на разнообразных объектах управления по
ПИД - закону. Качество регулирования достигается первичной настройкой на объект и возможностью коррекции настроек.
Первичная настройка регулятора производится в полуавтоматическом режиме по введенным параметрам объекта управления с использованием внутренней библиотеки коэффициентов настроек.
В регуляторе имеется возможность оперативно перейти на резервные настройки при изменении параметров объекта управления, например при увеличении массы материала в печи.
Для объектов управления, имеющих очень большое транспортное запаздывание, "Контур" дает возможность применения регулирования с предсказанием.
При использовании ПИД- закона, регулятор имеет возможность ограничить управляющие воздействие – нижнее и верхнее ограничение на управляющее воздействие, определяемое инерционностью (например, минимальная длительность импульса управляющего воздействия) и ходом исполнительного механизма (например, время перемещения исполнительного механизма)
Регулятор осуществляет измерение сигналов от стандартных датчиков, программа линеаризации для которых хранится в памяти регулятора и осуществляется автоматически.
В регуляторе имеется функция программной линеаризации, сущность которой заключается в возможности установки необходимых соотношений между входным сигналом и преобразованным значением по кусочно-линейной зависимости. На вход модуля линеаризации может быть подключен любой измерительный канал, а выход подключен к входу одного из контуров регулирования или к аналоговому каналу вывода.
Эта функция может быть использована для линеаризации передаточной характеристики нестандартных датчиков или измеряемых параметров с сильной нелинейностью, при условии, что известны (или определены расчетно-опытным путем) все необходимые соотношения.
В регуляторе имеется возможность использования до восьми предельных компараторов, с индивидуальной настройкой каждого. Настройки компараторов – выбор рабочего входа, выхода, функция сигнализации (больше или меньше), уставка сигнализации и зона возврата.
Основные особенности "Контура":
возможность использования в многоконтурных системах регулирования;
возможность применения для малоинерционных объектов, для которых To/Ko ≤ 20,
где Тo, Кo – постоянная времени и коэффициент активности объекта управления.
Для оперативного управления процессом регулирования "Контур" имеет два цифровых входа, которые используются для оперативного переключения режимов управления (например, для запоминания регулирующего воздействия и выдачи его на объект управления до окончания замены датчика, вышедшего из строя).
Для возможности интегрирования в информационную сеть АСУ в регуляторе имеется интерфейс RS485 с поддержкой высокой скорости обмена.
Конфигурирование и настройку регуляторов, подключенных в сеть, можно осуществлять не только с клавиатуры по месту установки устройств, но и с удалённого персонального компьютера при помощи сервисной программы, входящей в комплект поставки регулятора. Программа функционирует под управлением ОС Windows 95/98/2000/XP.
Сервисная программа позволяет считать текущую конфигурацию и настройки любого регулятора в сети, зная которые можно осуществить любые коррективы настроек регулятора, даже не имея аппаратного доступа к устройству. Считанные настройки можно сохранить в виде файла (проекта), после чего в сохраненном проекте можно внести необходимые изменения, а затем в удобный момент времени оперативно загрузить настройки по сети в выбранный регулятор.
Регулятор обеспечивает сбор и архивирование данных во внутренней энергонезависимой памяти, с возможностью последующей передачи этих данных в персональный компьютер. Таким образом, появляется возможность использовать прибор не только по своему прямому назначению (как регулятор), но и как четырехканальный показывающий и регистрирующий прибор.
Особенностью настройки программного регулирования является возможность ввода значений задания на каждом участке, как в процентах, так и в единицах измерения регулируемого параметра. При этом временная продолжительность участков определяется временами начала и окончания участков.
В память технологических программ регулятора (группа из 4-х программ) в любой момент времени могут быть загружены новые программы, созданные при помощи сервисного программного обеспечения. При этом, возможно создание целой библиотеки технологических программ при помощи графического редактора программ, входящего в сервисное ПО, с возможностью их сохранения в виде архивных файлов технологических программ на ПК.
При использовании барьеров искрозащиты, "Контур" может работать с датчиками, установленными во взрывоопасной зоне.
Варіант 25
1. ПД-регулятор - это параллельно соединенные пропорциональное и идеальное дифференцирующее звенья. Выходной сигнал ПД-регулятора ( u(t) ) зависит от ошибки регулирования ( e(t) ) и от производной от этой ошибки (от скорости изменения ошибки).
![]()
K1 - коэффициент усиления пропорциональной части,
K2 - коэффициент усиления дифференцирующей части
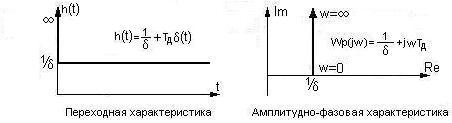
Передаточная функция ПД-регулятора: Wр(S)=K1+K2*S
Переходная характеристика: h(t)=K1+K2*t), t0 , где t) - дельта-функция
Усилительные свойства ПД-регулятора характеризуют два параметра:
1) предел пропорциональности =1/K1 - величина, обратная K1 (см. П-регулятор)
2) постоянная времени дифференцирования (время предварения) Тд=K2
Динамические характеристики ПД-регулятора
В системе регулирования с ПД-регулятором дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки.
Прямые показатели качества - это показатели, которые можно определить непосредственно по переходной кривой процесса. К ним относятся:
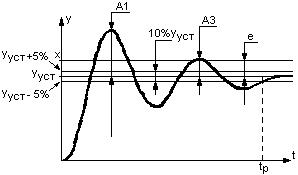
1) Степень затухания () - показывает, насколько сильно затухают колебания.
=1-A3/A1 , где
A1,A3-амплитуды первого и третьего пиков переходной кривой соответственно.
Чем больше степень затухания - тем меньше будет колебаний переходной кривой до достижения установившегося значения. Чем меньше степень затухания - тем больше будет колебанийпереходной кривой до достижения установившегося значения. Для незатухающих колебаний с постоянной амплитудой =0. Для апериодического процесса =1.
2) Перерегулирование () - показывает, насколько сильно регулируемая величина в процессе регулирования отклоняется от установившегося значения.
=A1/yуст , где
A1-амплитуда первого пика переходной кривой,
yуст-установившееся значение регулируемой величины.
Во избежание возникновения аварийных ситуаций значение перерегулирования должно быть таким, чтобы не допустить выхода значений регулируемого параметра за рамки нормального технологического режима.
3) Статическая ошибка (e) - показывает, на сколько отличается задание и установившееся в результате регулирования значение.
e=x-yуст, где
x-задание, yуст-установившееся значение регулируемой величины.
4) Время регулирования (tр) - время, через которое отклонение регулируемого параметра от установившегося значения не превышает 5%. Оно определяется следующим образом: проводится прямая y=yуст, проводятся линии y=yуст-5% и y=yуст+5% (границы области 5%-ого отклонения). Последняя точка пересечения переходной кривой и этих границ определяет время регулирования (tр).
«РЕМИКОНТ» это регулирующие микропроцессорные контроллеры. Они представлены тремя сериями: Р-110, Р-120, Р-130.
Контроллеры «РЕМИКОНТ» серии Р-110, Р-120 представляют собой микропроцессорные устройства управления, архитектура которых оптимизирована для решения задач автоматического регулирования технологических процессов в энергетической, металлургической, химической и др. отраслях промышленности.Основные функции контроллеров Р-110, Р-120: локальное, каскадное, программное, многосвязное регулирование, управление с переменной структурой; формирование ПИД-законов регулирования; выполнение разнообразных статических и динамических преобразований аналоговых сигналов, обработка и формирование дискретных сигналов; выполнение всех алгоритмических задач, которые решаются с помощью традиционных аналоговых приборов автоматического регулирования; формирование программно-изменяющихся во времени сигналов; выполнение операций управляющей логики.
В состав серии Р-110 входят две модели контроллеров: модель Р-110-одиночный «РЕМИКОНТ» и дублированный «РЕМИКОНТ» - модель Р-112, каждый из которых рассчитан на большое (40-200) число входных-выходных сигналов.
В состав серии Р-120 также входят две модели контроллеров: одиночный «Ремиконт» Р-120 и дублированный - модель Р-122 на среднее (15-90) число входных-выходных сигналов.
Технические характеристики контроллеров Р-110 и Р-120:
- Количество сигналов ввода: аналоговых-64, дискретных-126;
- Количество сигналов вывода: аналоговых-64, дискретных-126, импульсных-64;
- Количество выполняемых функций (алгоритмов) -45;
- Входные сигналы: аналоговые постоянного тока 0 - 5, 0 -20, 4 -20 мА, напряжения постоянного тока -10 - 0 + 10 В, дискретные напряжением 24 В;
- Выходные сигналы: аналогичные входным, дискретные рассчитаны на максимальное напряжение 48 В и максимальный ток нагрузки 0,2 А;
- Питание от сети переменного тока напряжением 220, 240 В при частоте 50, 60 Гц;
- Потребляемая мощность - 120 ВА;
- Время сохранения информации при отключении питания -360 часов;
- Точность установки сигнала задания - 0,1%.
Контроллер «РЕМИКОНТ» Р-130 малоканальный многофункциональный регулирующий.
«Ремиконт» серии Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логико-программное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий. Контроллер Р-130 применяется для управления сложными технологическими процессами с большим числом контролируемых параметров и управляющих сигналов. Он имеет проектную компановку, которая позволяет пользователю выбрать нужный набор модулей и блоков согласно числа и вида входных-выходных сигналов. Входные сигналы от термопар ТХК, ТХА, ТПР, ТВР, ТИП, сигналы от термометров сопротивления ТСМ, ТСП; унифицированные аналоговые сигналы постоянного тока 0 - 5, 0 -20, 4 -20 мА, 0 - 10 В дискретные сигналы. Выходные сигналы: постоянного тока, аналогичные входным, дискретные. Напряжение питания от сети переменного тока 220 или 240 В, постоянного тока 24 В. Время сохранение информации при отключении питания -168 часов. Потребляемая мощность-15 ВА.
ВАріант 26
ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, даное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно. Это все стоит учитывать при выборе закона регулирования.
В случаи если вход регулятора зашумлен, имеют место существенные скачки регулируемой величины или процесс имеет стохастический характер — дифференциальная составляющая в миг приведет вашу систему к расходящемуся процессу. Выбор время дифференцирования – очень сложное и ответственное решение для инженера.
Рассмотрим же математическое описание «идеального» ПИД-регулятора.
Формула выходного сигнала:

где:
U(t) – выходной сигнал регулятора
P – пропорциональная часть
I – интегральная часть
D- дифференциальная часть
K – коэффициент усиления
Tи – постоянная интегрирования
Тд – время дифференцирования
ε(t) – ошибка (входной сигнал регулятора).
Как видно из формулы, дифференциальная часть – производная от ошибки, да ещё и с коэффициентом Тд – временем дифференцирования. Эта часть может существенно уменьшить время регулирования и улучшить динамическое качество регулирования.
ПИД-регулятор можно просто собрать используя схуму, полученную типовым соединением звеньев – параллельным.
ПИД-регулятор - это параллельно соединенные П-, И- и Д- звенья. Выходной сигнал ПИД-регулятора ( u(t) ) зависит от ошибки регулирования ( e(t) ), от интеграла от этой ошибки и от производной от этой ошибки.

K1 - коэффициент усиления пропорциональной части,
K0 - коэффициент усиления интегральной части
К2 - коэффициент усиления дифференциальной части
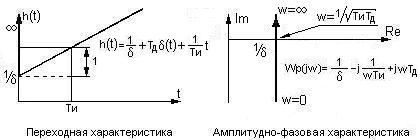
Передаточная функция ПИД-регулятора: Wр(S)=K1+K0/S+K2*S
Переходная характеристика: h(t)=K1+K0*t+K2*d(t), где d(t) - дельта-функция, t?0
Усилительные свойства ПИД-регулятора характеризуют три параметра:
1) предел пропорциональности d=1/K1 - величина, обратная K1 (см. П-регулятор)
2) время изодрома Ти=1/K0 - величина, обратная K0 (см. И-регулятор)
3) постоянная времени дифференцирования (время предварения) Тд=K2 (см. ПД-регулятор)
Динамические характеристики ПИД-регулятора
Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П-, И-, и ПД-регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием.
Пневматичний мембранний виконавчий механізм (ПМІМ) - виконавчий механізм, в якому переміщення вихідного органу (штока) досягається зміною тиску повітря на мембрані.
Завдяки простоті пристрою, швидкодії і надійності ці виконавчі механізми одержали широке поширення в промисловості головним чином для переміщення регулюючих органів в системах автоматичного регулювання та дистанційного управління запірними пристроями, а також для приведення в дію реле різних захисних пристроїв (реле спрацьовує, коли тиск, що діє на мембрану ПМІМ, досягає заданого значення). Основні параметри, що характеризують ПМІМ: діапазон зміни командного тиску повітря, що діє на мембрану, ефективна площа мембрани і хід штока.
Пружним елементом ПМІМ зазвичай служить еластична гумовотканинна мембрана. При визначенні развиваемого мембраною зусилля необхідно враховувати її жорсткість, збільшення якої зменшує чутливість ПМІМ.
Якість роботи ПМІМ залежить від їх статичних і динамічних характеристик.
Статична характеристика визначає залежність ходу штока ПМІМ від зміни тиску, що діє на мембрану; динамічна характеристика - час і характер спрацьовування при зміні вхідного командного тиску.
Динамічні параметри ПМІМ залежать головним чином від часу наповнення і спорожнення мембранної камери і задаються зазвичай спільно з характеристиками підвідних трубопроводів.
Пневматичний поршневий виконавчий механізм (ППІМ) - виконавчий механізм, в якому переміщення вихідного органу (штока) досягається подачею стисненого повітря в циліндр, забезпечений поршнем.
ППІМ широко застосовуються в якості приводів у системах пневмоавтоматики, верстатобудуванні для приведення в дію затискних пристроїв і механізмів подачі для гальмування та ін По конструкції ППІМ аналогічні силовим гидроцилиндрам.
Пневмопривід поршневий автоматизований (ППА) - автоматичний керований пневматичний поршневий механізм. ППА широко поширені в металургійній промисловості, машинобудуванні та інших галузях виробництва. Необхідна умова автоматизації пневмоприводів - оснащення їх розподільниками стисненого повітря з дистанційним управлінням.
У металургійних машинах зазвичай застосовують розподільники з електропневматичним управлінням.
У релейних схемах автоматики котушки розподільників перемикаються контактами, в безконтактних схемах, як правило, силовими напівпровідниковими тріодами.
При автоматизації верстатів і верстатних ліній застосовують розподільники з пневматичним управлінням, команди на перемикання яких подаються, наприклад від пневматичних шляхових вимикачів. ППА підрозділяються на Короткоходовая і довгоходові.
У Короткоходовая ППА повітря подається в расширяющуюся порожнину протягом усього часу їх ходу з одного крайнього положення в інше. Швидкість в процесі руху зазвичай не регулюють.
Плавність ходу при необхідності досягається застосуванням пневматичного дроселя. Схеми автоматики Короткоходовая пневмоприводів порівняно прості і складаються з урахуванням графіка роботи механізмів в технологічному потоці. Командні імпульси в схеми подаються від датчиків автоматики, шляхових вимикачів і т. п.
Довгоходові ППА (з довгою ходу до 10 ... 12 м) широко застосовуються в трубопрокатному виробництві та розвивають швидкість руху до 6 м / с при масі переміщаються частин до 1000 кг і більше.
Для запобігання удару в процесі руху необхідно з високою точністю подавати команди на початок і кінець гальмування протитиском. Такі пневмоприводи автоматизуються за допомогою спеціальних електронних обчислювальних пристроїв, які обчислюють для кожного ходу шлях гальмування залежно від швидкості руху поршня і тиску повітря в магістралі.
Магні́тний пуска́ч (рос. пускатель магнитный, англ. magnetic starter, solenoid starter) — електромеханічнийкомутаційний пристрій, призначений для керування живленням електродвигунів: їх пуску, розгону, забезпечення неперервної роботи, відключення живлення та захисту електродвигунів від перенавантажень. Пускач являє собоюконтактор, комплектований додатковими приладами: тепловим реле, плавкими запобігачами та додатковою контактною групою чи автоматом для пуску електродвигуна.
У процесі поточного ремонту проводять очищення від бруду та пилу, перевіряють стан магнітної системи: зазори, заїдання рухомих частин, справність і регулювання механічної та електричної блокування, кріплення та справність котушок. Перевіряють систему: стан контактів та їх ремонт, справність дугогасильних камер та ін Далі перевіряють внутрішню комутацію апарату, її фізичний стан, міцність з'єднань і кріплень. У самому корпусі виправляють дефекти поверхні, вм'ятини, перевіряють справність заземлення. Розбирання пускачів виконують в необхідному обсязі в залежності від виду несправності.
Усилитель — элемент системы управления (или регистрации и контроля), предназначенный для усиления входного сигнала до уровня, достаточного для срабатывания исполнительного механизма (или регистрирующих элементов), за счёт энергии вспомогательного источника, или за счёт уменьшения других характеристик входного сигнала (под термином «сигнал» здесь и далее понимается любое явление (или процесс), характеристики которого необходимо увеличить).[источник не указан 622 дня]
Термин усилитель в своём первичном (основном) значении относится к преобразованию (увеличению, усилению) одной из характеристик исходного входного сигнала (будь то механическое движение, колебания звуковых частот, давление жидкости или поток света), при этом вид сигнала остаётся неизменным (остаётся механическим движением и т. д.; из одного вида в другой сигнал преобразуют датчики и устройства управления).
В то же время, термин «усилитель» не вполне корректно, но традиционно употребляется для устройств управления мощными электрическими нагрузками, например, «релейный усилитель» и «магнитный усилитель».
Типы усилителей
Активный усилитель — усиление сигнала осуществляется за счёт энергии внешнего источника: в сервоприводах (как то: гидро-, электро-, пневмоусилители) усиливается исходное механическое движение (как правило, оператора), за счёт внешней энергии. В электрических усилителях увеличивается амплитуда исходного сигнала (по напряжению и силе тока), в фотоумножителях — усиливается интенсивность исходного светового потока. В активных усилителях часто используется обратная связь: положительная — для повышения чувствительности, иотрицательная — для улучшения точности/стабильности.
Пассивный усилитель — усиление одной (необходимой) характеристики сигнала осуществляется за счёт уменьшения других характеристик: например, домкрат (а также тисы, ручная таль, рычаг) является усилителем — движения (силы) руки — за счёт скорости (эта характеристика сигнала уменьшается). Мухобойка, теннисная ракетка — для сравнения — являются усилителями скорости (за счёт уменьшения силы и/или времени воздействия).
Резонаторы и экраны — виды пассивных усилителей, применяемых для усиления периодических (гармонических) колебаний в приёмниках и передатчиках звуковых и радиоволн (происходит усиление рабочей полосы в выбранном направлении за счёт уменьшения общей полосы и других направлений приёма/излучения).
Зеркала и линзы — аналогично предыдущему, для оптики, происходит усиление для выбранного участка (угла) наблюдения/освещения, в ущерб остальным (участкам, углам). Сюда относятся все оптические системы от лупы до телескопа.
Системы с накоплением энергии — виды пассивных усилителей, в которых большую часть времени происходит только накопление энергии сигнала (подаваемой относительно равномерно), и меньшую часть времени (чаще — импульсивно) — отдачу накопленного и усиленного сигнала на выходе: молоток, преодоление крутой горки автомобилем «с разгона», система зажигания (катушка зажигания) бензиновых двигателей, рубиновые лазеры, гидротаранный насос.
Смежные понятия
Увеличитель — практически полный синоним слова «усилитель», однако чаще употребляется для устройств, увеличивающих линейные размеры сигнала, что характерно для оптики (фотоувеличитель, увеличительное стекло). Устоявшиеся термины: «увеличитель сцепного веса», «увеличитель крутящего момента».
Ускоритель — устройство, увеличивающее скорость совершения процесса или движения частиц.
Умножитель — вид усилителя, в котором увеличение характеристики сигнала происходит в кратное число раз (соответственно числу ступеней). Примеры: умножитель напряжения, умножитель частоты, фотоэлектронный умножитель.
Электронный усилитель
Основная статья: Электронный усилитель
Электронный усилитель — усилитель электрических сигналов, в усилительных элементах которого используется явление электрической проводимости в газах, вакууме и полупроводниках. Электронный усилитель может представлять собой как самостоятельное устройство, так и блок (функциональный узел) в составе какой-либо аппаратуры — радиоприёмника, магнитофона, измерительного прибора и т. д.
Усилитель звуковых частот
Основная статья: Усилитель звуковых частот
Усилитель звуковых частот (УЗЧ), усилитель низких частот (УНЧ), усилитель мощности звуковой частоты (УМЗЧ) — прибор (электронный усилитель) для усиления электрических колебаний, соответствующих слышимому человеком звуковому диапазону частот (обычно от 16 до 20 000 Гц, в специальных случаях — до 200 кГц). Может быть выполнен в виде самостоятельного устройства, или использоваться в составе более сложных устройств — телевизоров, музыкальных центров, радиоприёмников, радиопередатчиков, радиотрансляционной сети и т. д.
Операционный усилитель
Основная статья: Операционный усилитель
Операционный усилитель — (ОУ, OpAmp) — усилитель постоянного тока с дифференциальным входом и, как правило, единственным выходом, имеющий высокий коэффициент усиления. ОУ почти всегда используются в схемах с глубокой отрицательной обратной связью, которая, благодаря высокому коэффициенту усиления ОУ, полностью определяет коэффициент передачи полученной схемы.
В настоящее время ОУ получили широкое применение как в виде отдельных чипов, так и в виде функциональных блоков в составе более сложныхинтегральных схем. Такая популярность обусловлена тем, что ОУ является универсальным блоком с характеристиками, близкими к идеальным, на основе которого можно построить множество различных электронных узлов.
Измерительный усилитель (средство измерений)
Основная статья: Измерительный усилитель (средство измерений)
Измерительный усилитель (средство измерений) — электронный усилитель, применяемый в процессе измерений и обеспечивающий точную передачу электрического сигнала в заданном масштабе.
Измерительный усилитель
Основная статья: Измерительный усилитель
Измерительный усилитель (иначе инструментальный усилитель, электрометрический вычитатель[1]) — это тип дифференциального усилителя с характеристиками, подходящими для использования в измерениях и тестирующем оборудовании. Такие характеристики включают: очень малое смещение постоянного тока, малый дрейф, малый шум, очень высокий коэффициент усиления при разомкнутой обратной связи, очень высокийкоэффициент ослабления синфазного сигнала, и очень высокие входные сопротивления. Такие усилители применяются, когда требуются большаяточность и высокая стабильность схемы, как кратковременно, так и долговременно.
Гидравлический усилитель
Основная статья: Следящий гидропривод
Следящий гидропривод — это регулируемый гидропривод, в котором закон движения выходного звена (вала гидромотора или штока (в некоторых случаях корпуса) гидроцилиндра) изменяется в зависимости от управляющего воздействия. Как правило к функциям слежения в следящем гидроприводе добавляются функции усиления управляющего сигнала по мощности. Поэтому синонимом термина следящий гидропривод считается термин гидравлический усилитель.
Магнитный усилитель
Основная статья: Магнитный усилитель
Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока. Основное назначение — управление силовым электроприводом (распространены в строительной технике), также применялись в бытовых стабилизаторах переменного тока, в регуляторах освещения киноконцертных залов, в двоичной ЭВМ ЛЭМ-1 Л. И. Гутенмахера и в троичных ЭВМ «Сетунь» и «Сетунь-70» Н. П. Брусенцов а также в цепях управления тепловоза[2][3][4]. По-прежнему магнитные усилители используются в системах, измеряющих постоянные токи от тензодатчиков. Гибридные схемы, сочетающие в себе миниатюрный магнитный усилитель с полупроводниковым, легко решают проблему дрейфа нуля и обладают высокой точностью.
Релейный усилитель
Реле исторически появилось как усилитель сигнала (напряжения) в телеграфной связи, где на протяжённых линиях связи сигнал ослабевал и промежуточные реле восстанавливали (усиливали) сигнал (напряжение) для следующего участка линии. Сигнал был дискретным (включено-выключено), соответственно, и реле использовалось в качестве дискретного усилителя.
В настоящее время непосредственно для усиления сигналов реле практически не используется, а применяется для разгрузки контактов, многоконтактного переключения и гальванической развязки электроцепей, то есть, как устройство управления и защиты.
Вероятно, по аналогии с реле, устройства управления (силовой) нагрузкой, которые ничего не усиливают, также традиционно называют усилителями, к примеру, магнитный усилитель.[источник не указан 622 дня]
Варіант 27
Варіант 7
1. Пропорційний закон регулювання П- закон
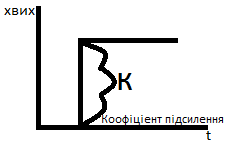
Такий закон відпрацьовуе пропорційний регулятор
, тобто переміщення регулюючого органу в кожен
момент часу пропорційне відхиленню вхідної велечини .
Диференційне рівняння
Uрег=К*∆Х де ∆Х=Хзадане-Хдійсне
W(p)= Uрег/∆Х=К
К- коофіціент пропорційності
Часова характеристика
Приклади регуляторів ПР 2.5 ПР 2.8
2. Вибір типу регулятора здійснюеться за допомогою перехідної кривої
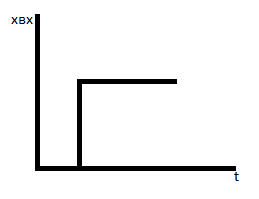
Для того щоб правильно обрати закон керування треба визначити часову характеристику обьекта регулювання
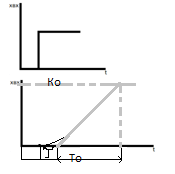
Більшість обьектів керування характерезуються наступними параметрами
Стала
часу То ; Тау запізнення
![]()
![]() відношення
значення цих велечин необхідне для
вибору закону керування .
відношення
значення цих велечин необхідне для
вибору закону керування .
Якщо коофіцієнт відношення буде в межах 0.2-1 то обираемо неперервний закон керування ( П ПІ ПІД )
Якщо коофіцієнт відношення буде менше 0.2 то обираемо релейний регулятор .
Якщо коофіцієнт відношення буде більше 1 то обираемо імпульсний регулятор
Основними прямими показниками якості регулювання є наступні:
Максимальне динамічне відхилення. Це найважливіший показник якості перехідного процесу, являє собою максимальну амплітуду відхилення вихідного параметра (y1, рис. 1). Найбільшим відхиленням у збіжному перехідному процесі буде перше відхилення, яке безпосередньо іде за збуренням.
Залишкове відхилення. Цей показник називають ще залишковою нерівномірністю. Характеризує величину відхилення регульованої величини від заданого значення по закінченні перехідного процесу. Залишкове відхилення характерне при застосуванні П-регулятора. Залежить від навантаження на об'єкт, його динамічних властивостей і настроювальних параметрів регулятора. (Див. Пропорційний закон регулювання).
Час регулювання. Це проміжок часу tр (рис. 1) від моменту надходження на вхід ступінчастого впливу (завдання, збурення) до моменту, коли відхилення регульованої величини від заданого значення стає меншим деякого відносно малого числа δ (зона нечутливості регулятора). Прийнято вважати, що перехідний процес закінчиться в той момент часу, починаючи з якого, відхилення регульованої вели¬чини відрізняється від сталого значення не більш ніж на 5%.
Перерегулювання – максимальне відхилення у2 керованої величини від нового заданого значення в бік, протилежний від початкового значення. У тих випадках, коли керована величина наближається до нового значення тільки з одного боку пере регулювання відсутнє (рис. а).
Квадратичний інтегральний критерій якості характеризує сумарну площу, обмежену кривою перехідного процес.
ВАРІАНТ № 28