

1 Варіант
1.Пропорційний закон регулювання. П – регулятори. Часові характеристики, передаточна функція, недоліки та переваги.
Підсилююча ланка – це така ланка АСР в якій в кожен момент часу вихідна величина повторює вхідну з заданим коефіцієнтом пропорційності.
Дифрівняння:
Хвих(t)= К * Хвх(t)
Передаточна функція: W(p)=Хвих(t)/Хвх (t)= К К- коефіцієнт підсилення Часова характеристика:
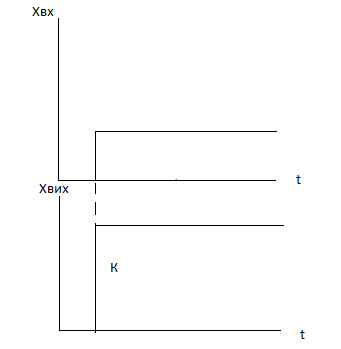
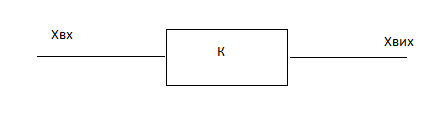
Структурна схема:
Пневматичні П-регулятори: ПР2.5;ПР2.8
Електричні: Любий ПІД-регулятор, відключивши І та Д складову
2. Оцінка якості регулювання
Регулювання – цу керування ,яке має задачу підтримувати зміни фізичної величини в установлених межах або за заданим законом , який харкактерезує технічний процес.

Основні показники якості:
Динамічна похибка(А1)-це найбільше відхилення регульованої координати від заданого значення
Статична похибка(Хст)-відхилення значення після перехідного процесу від заданого
Час перехідного процесу(tпер)-це проміжок часу за який перехідний процес закінчится
Перерегулювання а=А2/А1*100% - характеризує відхилення регульованої координати з різним знаком, що не допустимо для деяких об ‘єктів.Для реальних систем а=20-50%
Оцінка коливальності(ступінь затухання)
 =
А1-А3/А1
=
А1-А3/А1
Якщо =1, то в системі аперіодичний процес
Якщо > 0, то в системі незгасаючі коливання
Якщо <0, то в системі коливання з наростаючою амплітудою і система нестійка
3.Електронні регулюючі пристрої серії контур2 .Типи, призначення, характеристики.
До цього комплексу входять регулюючі пристрої серії РС29М , з імпульсним виходом різних модифікацій
Ці пристрої забезпечують:
1.формування і введення сигналу завдання.
2.підсилення сигналу розбалансу.
3.формування командного сигналу для впливу на об’єкт управління
4.індикація положення виконавчого механізма
РС29М складаєтся з трьох субблоків:
Регулюючий субблок РС29
Вимірювальний субблок ИУ012 , ИТ012
Джерело живлення ИПС011
Соживає потужність 18 Вт
Живлення 220В, 50 Гц
1)РС29.0:
-РС29.0.11 і РС29.0.12 вх.синал: 0…5мА; 0-10; 0-1; 0-0,1В Сигнал від індуктивного та реостатного датчика положення ВМ
- РС29.0.42 і РС19.0.43 вх.синал: 0…5;0(4)…20мА; 0-10; 0-1В
2)РС29.1:
-РС29.1.11 і РС29.1.12 вх.синал: 0…5мА; 0-10; 0-1; 0-0,1В Сигнал від індуктивного та реостатного датчика положення ВМ та сигнал взаємоіндуктивності -10 – 10мГн
- РС29.1.42 і РС19.1.43 вх.синал: 0…5;0(4)…20мА; 0-10; 0-1В та сигнал взаємоіндуктивності -10 – 10мГн
3) РС29.2:
- РС29.2.22 ;РС29.2.23; РС29.2.32; РС29.2.33 працюють з термометрам опору різних градуювань,можно підключити два датчики
4) РС29.3:
-РС29.3.42 і РС29.3.43 працюють з термопарами певних градуювань в межах сигналу 0-50 мВ
2 Варіант
1.Інетгральний закон регулювання .І-регулятори . Часові характеристики, передаточна функція, недоліки та переваги.
Інтегруюча ланка- це ланка, в якій вихідна величина дорівнює інтегралу за часом від вхідної величини
Дифрівняння:
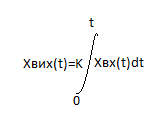
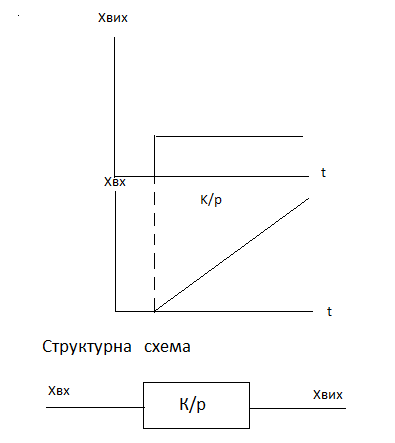
Передаточна функція:W(p)=K/p
Часова характеристика:
Пневматичних немає
Електричні: Любий ПІД-регулятор ,відключивши П та Д складові,але цей закон використовуєтся тільки в парі з П та Д законами