

3. Циклограмма работы кулачкового механизма
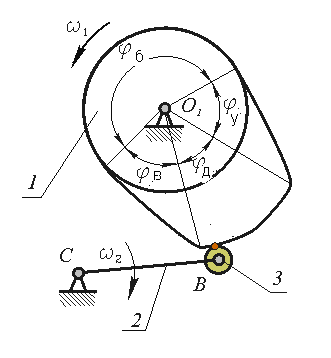
Рис. 2
Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2. В цикле движения толкателя в общем случае можно выделить четыре фазы (рис. 2): удаления из самого близкого (по отношению к центру вращения кулачка) в самое дальнее положение, дальнего стояния (или выстоя в самом дальнем положении), возвращения из самого дальнего положения в самое близкое и ближнего стояния (выстоя в самом ближнем положении). В соответствии с этим, углы поворота кулачка или фазовые углы делятся на:
угол удаления y
угол дальнего стояния д
угол возвращения в
угол ближнего стояния б.
Сумму φу + φд + φв называют рабочим углом и обозначают φр. Следовательно,
φу + φд + φв = φр.
4. Угол давления и угол передачи движения
Угол
давления ϑ
определяет
положение нормали п-п
в высшей КП относительно вектора скорости
и контактной точки ведомого звена (рис.
3, а, б).
Его величина определяется размерами
механизма, передаточной функцией
![]() и перемещения толкателя S.
и перемещения толкателя S.
Угол передачи движения γ - угол между векторами υ2 и υотн абсолютной и относительной (по отношению к кулачку) скоростей той точки толкателя, которая находится в точке контакта А (рис. 3, а, б):
![]() .
.
Если пренебречь силой трения между кулачком и толкателем, то силой, приводящей в движение толкатель (движущей силой), является давление Q кулачка, приложенное к толкателю в точке А и направленное по общей нормали п-п к профилям кулачка и толкателя. Разложим силу Q на взаимно перпендикулярные составляющие Q1 и Q2, из которых первая направлена по направлению скорости υ2. Сила Q1 перемещает толкатель, преодолевая при этом все полезные (связанные с выполнением технологических задач) и вредные (силы трения) сопротивления, приложенные к толкателю. Сила Q2 увеличивает силы трения в кинематической паре, образованной толкателем и стойкой.
Очевидно, что с уменьшением угла γ сила Q1 уменьшается, а сила Q2 увеличивается. При некотором значении угла γ может оказаться, что сила Q1 не сможет преодолеть все сопротивления, приложенные к толкателю, и механизм не будет работать. Такое явление называют заклиниванием механизма, а угол γ, при котором оно имеет место, называют углом заклинивания γзакл .
При проектировании кулачкового механизма задают допускаемое значение угла давления ϑдоп , обеспечивающее выполнения условия γ ≥ γ min > γ закл , т. е. текущий угол γ ни в одном положении кулачкового механизма не должен быть меньше минимального угла передачи γ min и значительно превосходить угол заклинивания γзакл .
Для кулачковых механизмов с поступательно движущимся толкателем рекомендуется γ min = 60° (рис. 3, а) и γmin = 45° - механизмов с вращающимся толкателем (рис. 3, б).
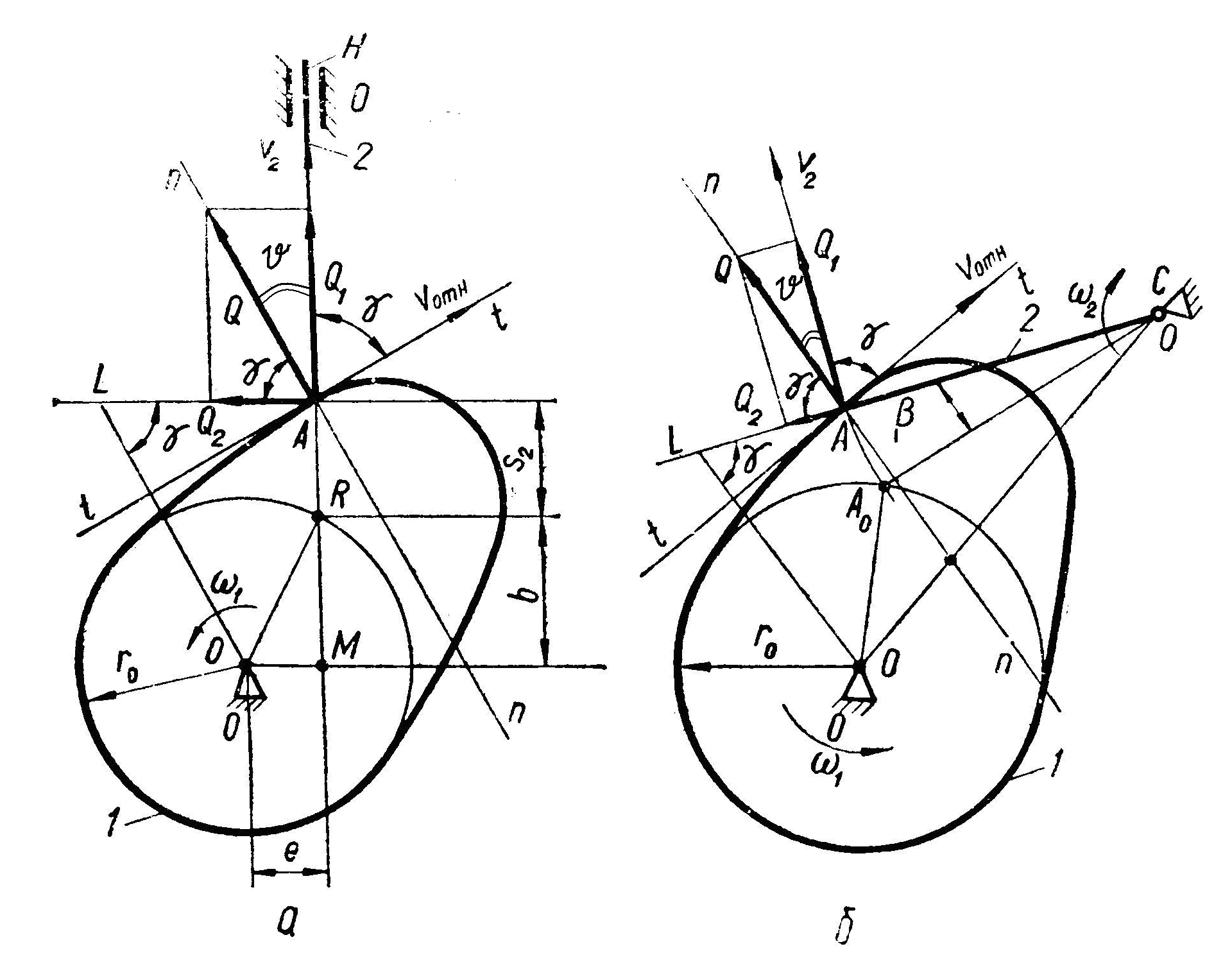
Рис. 3