

4.4.5 Пневматические преобразователи с дифференциальной схемой измерений
Другим способом уменьшения погрешности измерения в пневматических преобразователях является применение дифференциальной схемы измерения.
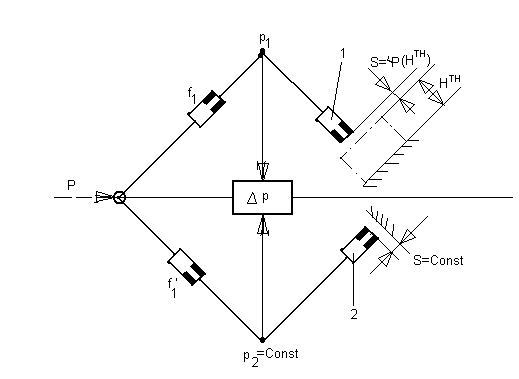
Рис. 4.25 Схема пневматического моста в дифференциальных пневматических преобразователях
Пневматические дифференциальные преобразователи строятся по мостовой схеме (рисунок 4.25). Пневматический мост состоит из двух ветвей. Одна ветвь имеет входное сопло f1 и измерительное сопло 1. Эта ветвь переменного давления “p1”, которое зависит от зазора S и, следовательно, от контролируемого параметра ТН. Другая ветвь образована входным соплом f1´ и соплом 2 с постоянным зазором S = Const. Эта ветвь постоянного давления р2 = Const, которая называется противодавлением.
К одной диагонали моста подводится воздух постоянного давления Р = Const, а с другой – снимается переменный параметр ∆р=р1–р2. Погрешность измерения дифференциального преобразователя составляет
![]() (4.7)
(4.7)
Поскольку обычно ∆р < p и изменяется во много раз больше, чем давление р, то согласно формулам (4.6) и (4.7) дифференциальные преобразователи имеют меньше погрешность и выше точность измерения по сравнению с простыми пневматическими преобразователями. На точность измерения дифференциальных преобразователей оказывают меньше влияние колебания давления воздуха ∆Р.
В качестве измерителя параметра “∆р” используются сильфонные и диафрагменные (мембранные) преобразователи.

Рис. 4.26 Схема дифференциального преобразователя с мембранной компенсационной системой
На рисунке 4.26 показана схема дифференциального преобразователя с компенсационной пневматической системой.
Сжатый воздух через входные сопла 1 и 2 передается в измерительную и компенсационную камеры 3 и 4, которые разделены мембраной 5. На мембране закреплена игла 6, которая во время перемещения изменяет площадь проходного сечения компенсационного сопла 7. Измерительное сопло 8 связано с измерительной камерой. В зависимости от зазора S мембрана занимает такое положение при котором расход воздуха через сопла 8 и 7 будет одинаковым, т.е. р1=р2.
Чувствительность (передаточное отношение К) при заданных диаметрах сопел зависит только от угла конуса иглы и не зависит от зазора S. Это расширяет пределы измерения и позволяет легко регулировать чувствительность прибора путем изменения иглы. В простых датчиках для этого необходимо менять сопла.
Точность до 0,1 мкм, производительность до 3000 шт/чел.
На рисунке 4.27 показана схема дифференциального пневматического преобразователя, у которого в качестве элемента сравнения используются сильфонные измерители, реагирующие на разницу давлений “∆р” в двух ветвях пневмомоста. Схема применяется для активного контроля при шлифовании вала. В качестве воспринимающего элемента используется трехконтактная скоба фирмы “Marposs”. На корпусе скобы 3 устанавливаются две “губки” c износостойкими контактами. Одна “губка” 1 – неподвижная, другая 2 – подвижная. Два диаметрально расположенных контакта выполняют измерительные функции, третий упорный контакт необходим для базирования скобы относительно заготовки. Внутри корпуса с помощью микровинта 5 размещается измерительная камера 4. Измерительное усилие создается пружиной 11.
Сжатый воздух под рабочим давлением Р истекает через входные сопла f1 и f1´, поступает в сильфоны 6 и 7.
Сильфоном называют измерительный элемент, который реагирует на изменение давления изменением своего объема. Сильфон 6 через ветвь f1 – f2 связан с измерительной камерой 4 и измерительным соплом 8. В этом сильфоне в процессе измерения создается давление “∆р1” , величина которого зависит от зазора S и, следовательно, от размера “d”. Сильфон 7 через другую ветвь f1´ – f2´ связан с соплом 9, через который ??????????????? 12 устанавливается постоянный расход воздуха. В результате в сильфоне 7 создается постоянное противодавление р =Const.
Свободные торцы сильфонов жестко связаны рамкой 10 с подвижными электроконтактами. В процессе шлифования вала р1≠р2 и за счет изменения объемов сильфонов рамка смещается до положения, при котором ∆р = 0. При этом, если размер вала d достигает предельных значений, то перемещение рамки вызывает включение электрической цепи В или Н (верхний предел или нижний предел).
Пневматические преобразователи обладают следующими достоинствами:
- достаточно высокая точность измерения ( ≈ 1мкм);
- непрерывность и дистанционность измерений;
- малогабаритная измерительная оснастка позволяет проводить измерения в труднодоступных местах;
- возможность контролировать практически любые линейные параметры;
- возможность комбинировать для образования измерительных систем, контролирующих сумму или разность размеров;
- бесконтактный способ измерения позволяет контролировать легкодеформируемые поверхности, исключить износ и повреждения контролируемой поверхности, что повышает надежность и точность контроля;
- сравнительно легко автоматизируются, просты в эксплуатации, требует менее квалифицированного обслуживания, чем индуктивные преобразователи;
- нечувствительность к вибрации и другим внешним условиям.
К факторам, ограничивающим применение пневматических преобразователей можно отнести:
- значительная инерционность измерений, что снижает производительность этих преобразователей;
- для надежной работы необходимость в сжатом, сухом, чистом воздухе постоянного давления (Р = 0,15 МПа), что связано с применением компрессорных станций, воздушных фильтров и ресиверов;
- ограниченный диапазон измерений из-за нелинейности характеристики преобразователя.