

2. Пример решения задачи №1 «Изучение колебаний динамической
Системы»
Свободные колебания
Исходная схема для анализа колебаний материальной точки М показана на рисунке 2.1.
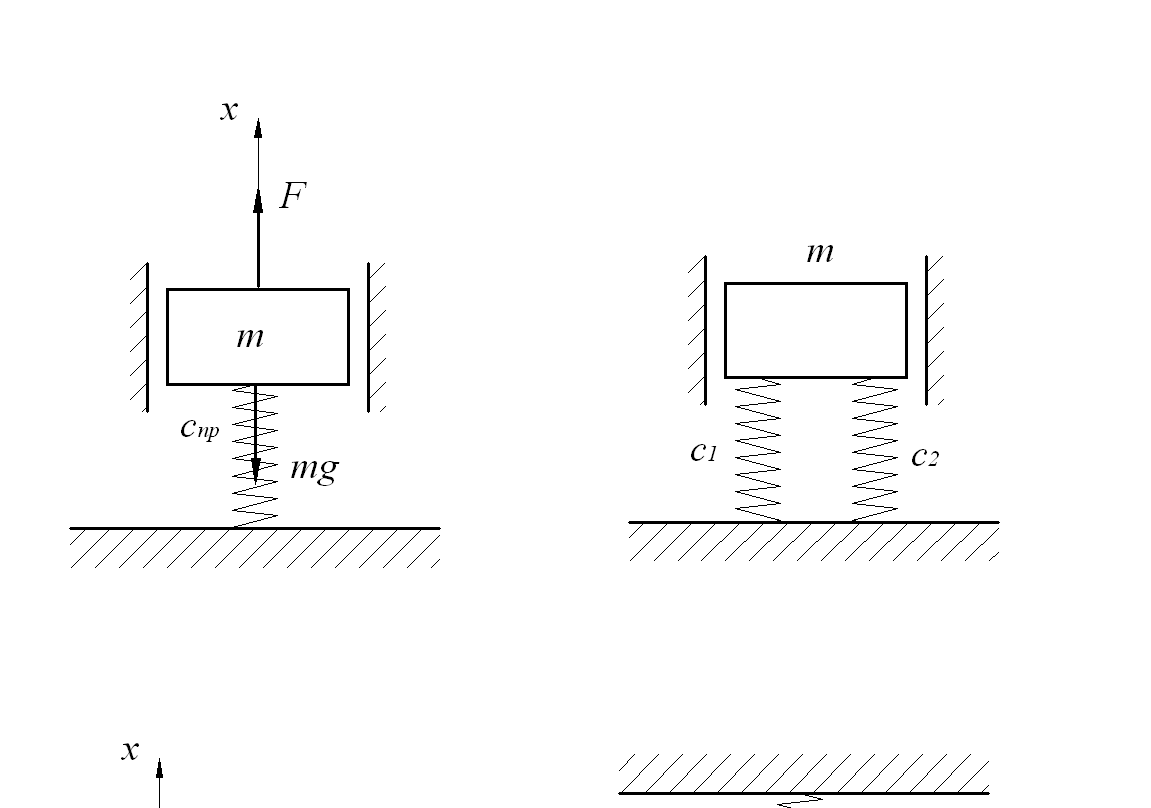
Рисунок 2.1 – Исходная схема динамической системы
Исходными данными для расчета являются:
масса материальной точки: m = 15 кг;
жесткость упругих элементов: с1 = 0,55 Н/м, с2 = 0,65 Н/м;
начальное перемещение (t=0): x0 = 0,09 м;
начальная скорость (t=0): v0 = 0,3 м/с.
Заменим два упругих элемента одним, имеющим приведенную жесткость спр. Для упругих элементов, соединенных параллельно, приведенная жесткость определяется по формуле:
![]() (2.1)
(2.1)
![]() Н/м
Н/м
Динамическая модель системы после проведенных преобразований будет иметь вид, показанный на рисунке 2.2, а. Предположим, что материальная точка М выведена из положения равновесия некоторой внешней нагрузкой F, направленной вниз. Изобразим материальную точку в текущем положении с приложенными к ней силами (рисунок 1.2). После снятия нагрузки F, имеющей импульсный характер, на массу m действуют сила тяжести G, направленная вниз, и сила упругости P, направленная противоположно деформации пружины (рисунок 2.2, б).
|
|
а) |
б) |
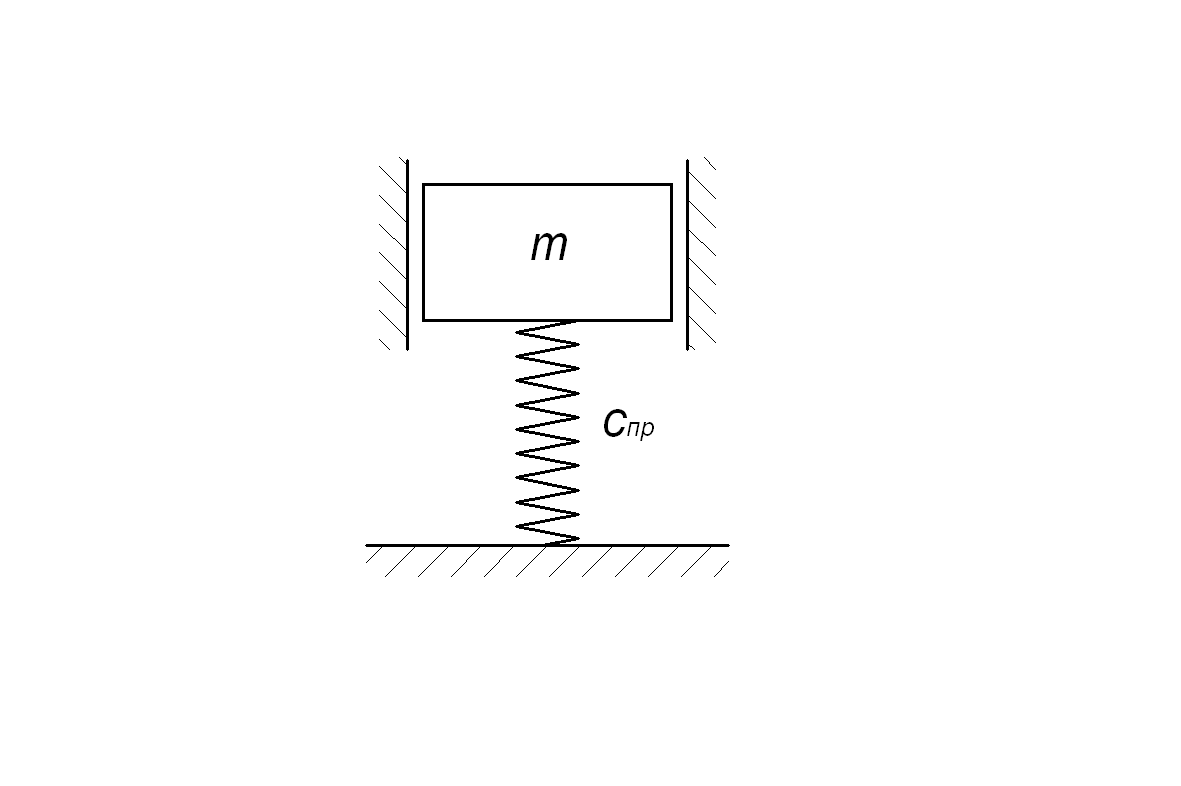
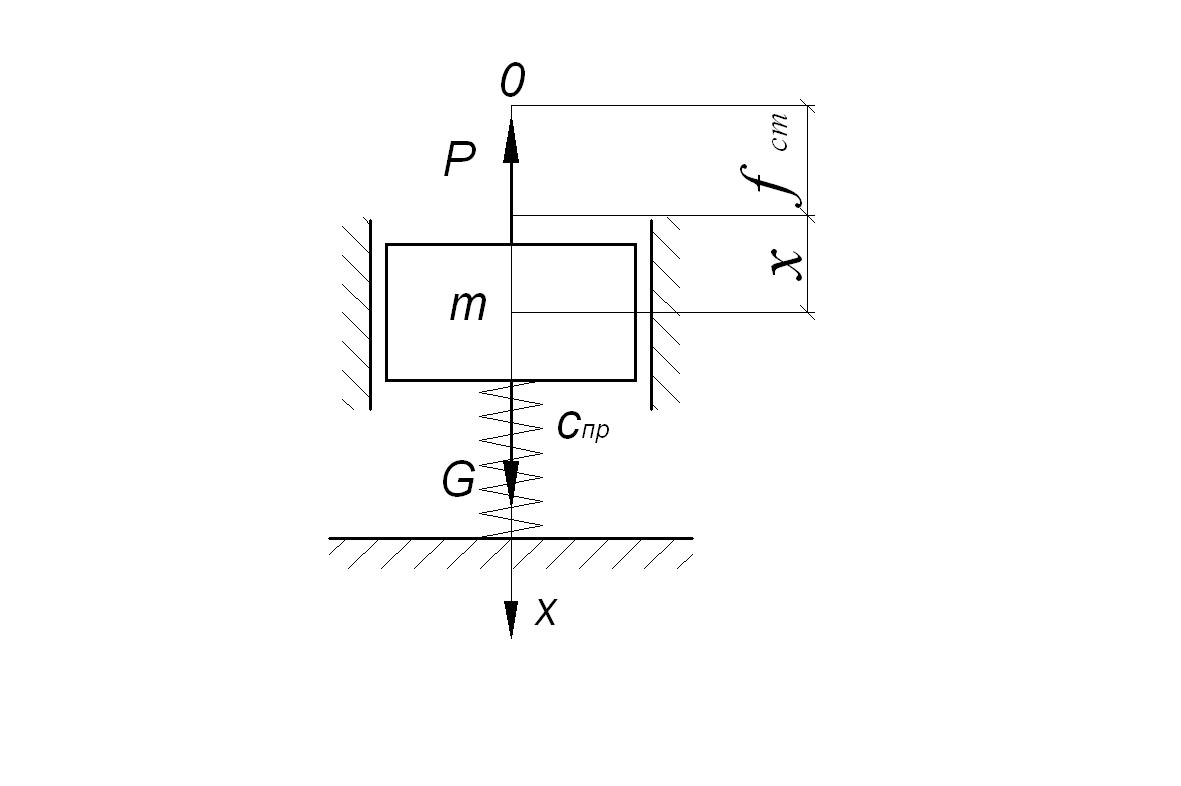
Рисунок 2.2 – Расчетная схема динамической системы
Запишем основное уравнение динамики в проекции на ось х, направленную вертикально вниз:
![]() (2.2)
(2.2)
где Рх – сила упругости пружины в проекции на ось х, равная
![]() (2.3)
(2.3)
Здесь
![]() - статическая деформация пружины; х
– текущая координата.
- статическая деформация пружины; х
– текущая координата.
Подставим в дифференциальное уравнение движения (2.2) значение силы упругости:
![]()
Получаем уравнение движения в виде:
![]()
Введем обозначение:
![]() (2.4)
(2.4)
Величина к называется циклической частотой свободных колебаний.
Тогда уравнение движения примет вид:
![]() (2.5)
(2.5)
Для
интегрирования однородного линейного
уравнения с постоянными коэффициентами
(2.5) воспользуемся подстановкой Эйлера.
Решение уравнения будем искать в виде:
![]() ,
тогда
,
тогда
![]() ,
,
![]() .
.
Подставив полученные выражения в уравнение (2.5), получим характеристическое уравнение:
![]()
Корни характеристического уравнения равны:
![]() ,
,
![]()
Поскольку корни – комплексные числа, то решение уравнения (2.5) будем искать в виде:
![]() (2.6)
(2.6)
Для определения констант интегрирования С1 и С2 продифференцируем уравнение (2.6) по времени:
![]() (2.7)
(2.7)
Согласно
исходным данным, в начальный момент
времени (t
=
0) точка имеет координату x0
и скорость
![]() .
Тогда, подставив эти начальные условия
(t
=
0: x
= x0,
.
Тогда, подставив эти начальные условия
(t
=
0: x
= x0,
![]() )
в уравнения (2.6) и (2.7), найдем:
)
в уравнения (2.6) и (2.7), найдем:
![]() ,
,
![]()
Откуда
![]() ,
, ![]()
Подставив найденные значения констант интегрирования С1 и С2 в уравнение (2.6), окончательно получим уравнение движения материальной точки М в виде:
![]() (2.8)
(2.8)
Для исходных данных имеем:
![]() ;
к=0,283
рад/с.
;
к=0,283
рад/с.
![]() (2.9)
(2.9)
Придадим уравнению (2.6) другой вид, введя вместо констант С1 и С2 другие постоянные А и β, положив:
![]()
Подставив эти значения С1 и С2 в уравнение (2.6), будем иметь:
![]()
Последнее уравнение можно привести к виду:
![]() (2.10)
(2.10)
Уравнение (2.10) является уравнением гармонического колебательного движения точки, в котором величина А называется амплитудой, а β – начальной фазой колебаний.
Амплитуда А и начальная фаза β свободных колебаний материальной точки как постоянные интегрирования, введенные вместо С1 и С2, определяются по начальным условиям движения. Продифференцировав уравнение (2.10) по времени, получим выражение, определяющее скорость точки М:
![]() (2.11)
(2.11)
Подставив в уравнения (2.10) и (2.11) начальные условия, получим:
![]()
откуда найдем значения констант интегрирования А и β:
 (2.12)
(2.12)
![]() (2.13)
(2.13)
Для исходных данных получим:
![]() м;
м;
![]() .
.
Тогда уравнение движения (2.10) запишется в виде:
![]() (2.14)
(2.14)
Период свободных колебаний определяется по формуле:
![]() (2.15)
(2.15)
![]() с
с
По уравнению (2.9) или (2.14) строим график свободных колебаний. На рисунке 2.3 показан график свободных колебаний материальной точки М, построенный в программном пакете Mathsoft Mathcad 11.
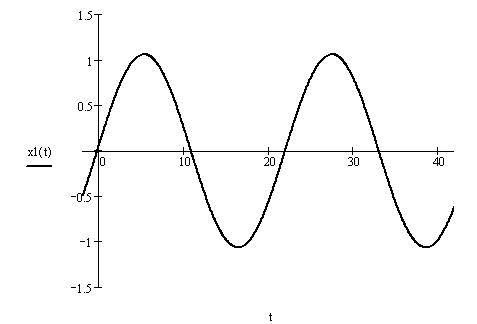
Рисунок 2.3 – График свободных колебаний материальной точки