

Приклад рішення :
Розрахувати привод механізму пересування візка вантажопідйомністю Q = 10т, якщо її вага G = 5,6 т, швидкість пересування υпер = 40 м/хв., діаметр колеса D = 350 мм, діаметр цапфи d = 90 мм, приведений коефіцієнт тертя в буксах ходових коліс μ = 0,01 ( при подшипниках кочення); коефіцієнт тертя ходових колес по рейкам f = 0,1 см ; α = 2,5 ; ККД = 0,9.
Визначаємо момент опору руху візка від статичного навантаження (Н×м):
МСТ = α(Q + G)(μr +f)
МСТ = 2,5( 10000+5600)(0,01×0,045 +0,001)10 = 565,5 Н×м
Визначаємо силу опору пересування візка :
![]()
Статична потужність електродвигуна (кВт) :
![]()
Користуючись додатком IV обираємо електродвигун МТO-12-6 потужністю N = 3,5 кВт з nдв = 905 об/хв., ПВ = 25%.
Кількість обертів ходового колеса (об/хв.):
![]()
Визначимо передаточне число механізма
![]()
Користуючись додатком V вибираємо редуктор ВК-400.
Порядок виконання роботи:
З таблиці варіантів завдання вибрати вихідні дані для розрахунку пересування візка крана.
Розрахувати момент опору руху візка від статичного навантаження.
Розрахувати силу опору пересування візка.
Розрахувати статичну потужність електродвигуна.
Користуючись додатком обрати електродвигун.
Розрахувати передаточне число механізма.
Сформулювати висновок.
ПРАКТИЧНА РОБОТА № 7
«Розрахунок механізму повороту стрілового крана з поворотною колоною »
Мета роботи: набути навички з вибору підшипників та визначення загального статичного моменту опору повороту крана
Завдання.
Визначити загальний статичний момент опору повороту крана, підібрати підшипники для механізму повороту стрілового крана з поворотною колоною за наступними вихідними даними: вантажопідйомність Q = ...т, вага крана G=...т,відстань від осі обертання до центру тяжіння с = ...м, відстань між підшипниками h = 4м, A = ...м.
Таблиця варіантів завдання
Варіант |
Q,т |
G, т |
с, м |
A ,м |
Варіант |
Q,т |
G, т |
с, м |
A ,м |
1 |
12 |
6 |
3,5 |
9 |
11 |
12,5 |
6,4 |
3,8 |
9,2 |
2 |
10 |
5,5 |
3 |
8,5 |
12 |
10,5 |
5,5 |
3,5 |
8 |
3 |
9 |
4,5 |
2,5 |
7,5 |
13 |
9,5 |
5 |
4,5 |
7,5 |
4 |
7,5 |
4 |
2,5 |
7 |
14 |
7,5 |
4,2 |
2,8 |
7,3 |
5 |
6,5 |
3,5 |
2,2 |
6,5 |
15 |
6 |
3,5 |
2 |
6,5 |
6 |
5 |
2,8 |
2 |
6 |
16 |
5 |
2,8 |
2,5 |
6,5 |
7 |
4,5 |
2,5 |
2 |
5,5 |
17 |
5 |
2,5 |
2 |
5,5 |
8 |
3 |
1,7 |
1,8 |
5 |
18 |
3 |
1,5 |
1,2 |
4,5 |
9 |
1,5 |
0,8 |
1,5 |
4,5 |
19 |
1,5 |
0,9 |
1,4 |
4,5 |
10 |
1 |
0,6 |
1,5 |
4 |
20 |
1 |
0,5 |
1,5 |
4 |
ВКАЗІВКИ
Теоретичні відомості.
Механізми служать для повороту стрілових кранів відносно вертикальної осі. Велике передаточне число (200... 1000) необхідне для обмеження лінійної швидкості вантажу з метою запобігання його розгойдуванню.
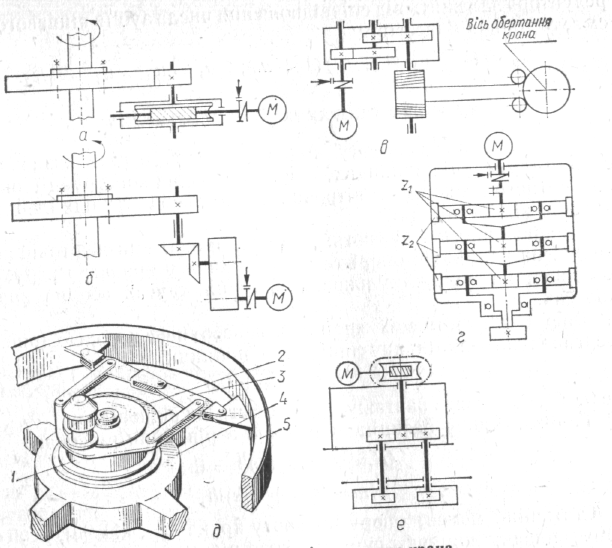
Рисунок 7.1 Кінематичні схеми механізмів повороту крана
Механізми повороту можна класифікувати за такими ознаками: за розміщенням на крані — механізм, який установлений на неповоротній рамі крана і повертає кран за допомогою зубчастою колеса великого діаметра; механізм, який установлений на поворотній частині крана і обертається разом з ним у результаті обкочування приводної шестірні навколо нерухомого зубчастого вінця на рамі; за конструкцією (рис.7.1) — з горизонтальним розміщенням двигуна з черв'ячним (а) або зубчастим (б) редуктором, в тому числі із зачепленням Новикова та з канатним приводом (в); з вертикальним розміщенням двигуна і планетарним (г) або хвильовим (д) редуктором; з гідравлічним приводом; за кількістю двигунів — однодвигунні (а...е) з однією приводною шестірнею або з двома шестірнями, зчепленими із зубчастим вінцем; багатодвигунні різних модифікацій (два двигуни працюють на один загальний редуктор і два-чотири двигуни — на загальний зубчастий вінець).
В основному механізми повороту однодвигунні, але для потужних кранів з великим вильотом застосовують багатодвигунні. [1, с. 61-64].