

Контрольные вопросы и задания
Сформулируйте назначение фюзеляжа и требования к нему.
Как реализуются требования к фюзеляжам в их конструкциях?
Охарактеризуйте конструктивно-силовые схемы фюзеляжа, дайте их характеристику и определите области применения.
Какие нагрузки действуют на фюзеляж? Опишите работу фюзеляжа под нагрузкой.
Определите назначение и опишите конструкцию силовых элементов фюзеляжа.
В чем назначение герметических кабин? Опишите их конструкцию, способы герметизации.
Глава 13 Системы управления
13.1. Элементы системы управления самолетом
Системы управления самолетом разделяются на основные и вспомогательные. К основным принято относить системы управления рулем высоты, рулем направления и элеронами (рулями крена). Вспомогательное управление – управление двигателями, триммерами рулей, средствами механизации крыла, шасси, тормозами и т. д.
Любая из основных систем управления состоит из рычагов управления и проводки, связывающей эти рычаги с рулями. Рычаги управления отклоняются ногами и руками пилотов. С помощью штурвальной колонки или ручки управления, перемещаемых усилием руки, пилот управляет рулем высоты и элеронами. Рулем направления управляют с помощью ножных педалей. Для облегчения пилотирования и повышения безопасности полета при продолжительном полете управление большинства гражданских самолетов дублируется: делают две пары педалей, две штурвальные колонки или ручки, которые связаны между собой так, что отклонение рычага первого пилота вызывает такое же отклонение рычагов у второго пилота.
Уменьшить усилие и даже полностью снять нагрузку с рычагов управления можно с помощью аэродинамической компенсации. Для преодоления больших, превышающих физические возможности пилотов усилий на рычагах управления к системе управления подключают гидравли-ческие или электрические приводы, которые называются усилителями (бустерами). В этом случае пилот управляет усилителями, которые, в свою очередь, отклоняют рули. Система управления (СУ) самолетов, предназна-ченных для длительных полетов, снабжается автопилотом, который обеспечивает пилотирование.
Привод рулевых устройств может быть гидравлическим, электри-ческим и пневматическим.
Рулем высоты и элеронами управляют при помощи ручки управ-ления или штурвальной колонки. Ручка (рис. 13.1) представляет собой вертикальный неравноплечный рычаг с двумя степенями свободы, т. е. поворачивающийся вокруг двух взаимно перпендикулярных осей.
При движении ручки вперед и назад отклоняется руль высоты, при перемещении ручки вперед (вперед и назад), влево и вправо (поворот вокруг оси а–а) отклоняются элероны. Независимость действия руля высоты и элеронов достигается размещением шарнира на оси.
На тяжелых самолетах вследствие большой площади рулей высоты и элеронов увеличиваются нагрузки, потребные для отклонения рулей. В этом случае самолетом удобнее управлять с помощью штурвальной колонки (рис. 13.2). Подобных колонок на самолете две: одной управляет командир корабля, другой – второй пилот. Каждая колонка состоит из дюралюминиевой трубы, головки штурвала и нижнего узла опоры штурвальной колонки, в торцах которого заделаны шарикоподшипники. В нижней части колонки имеется рычаг, к которому присоединены тяги управления рулем высоты. Тяги управления элеронами соединены с качалками, установленными на кронштейнах.
НП
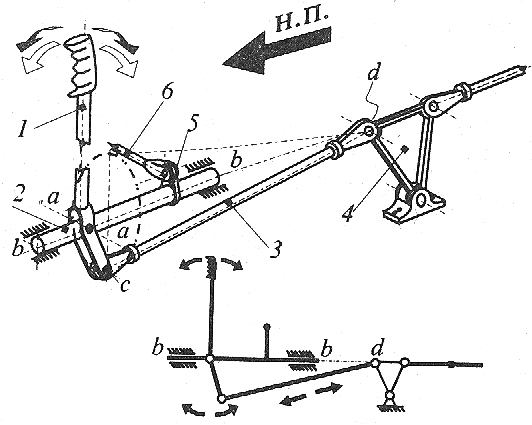
Рис. 13.1. Ручка управления маневренным самолетом [8]:
1 – ручка; 2 – ось-кронштейн; 3 – тяга управления рулем высоты;
4 – поддерживающая качалка; 5 – рычаг; 6 – тяга управления элеронами
Рис. 13.2.
Штурвальная колонка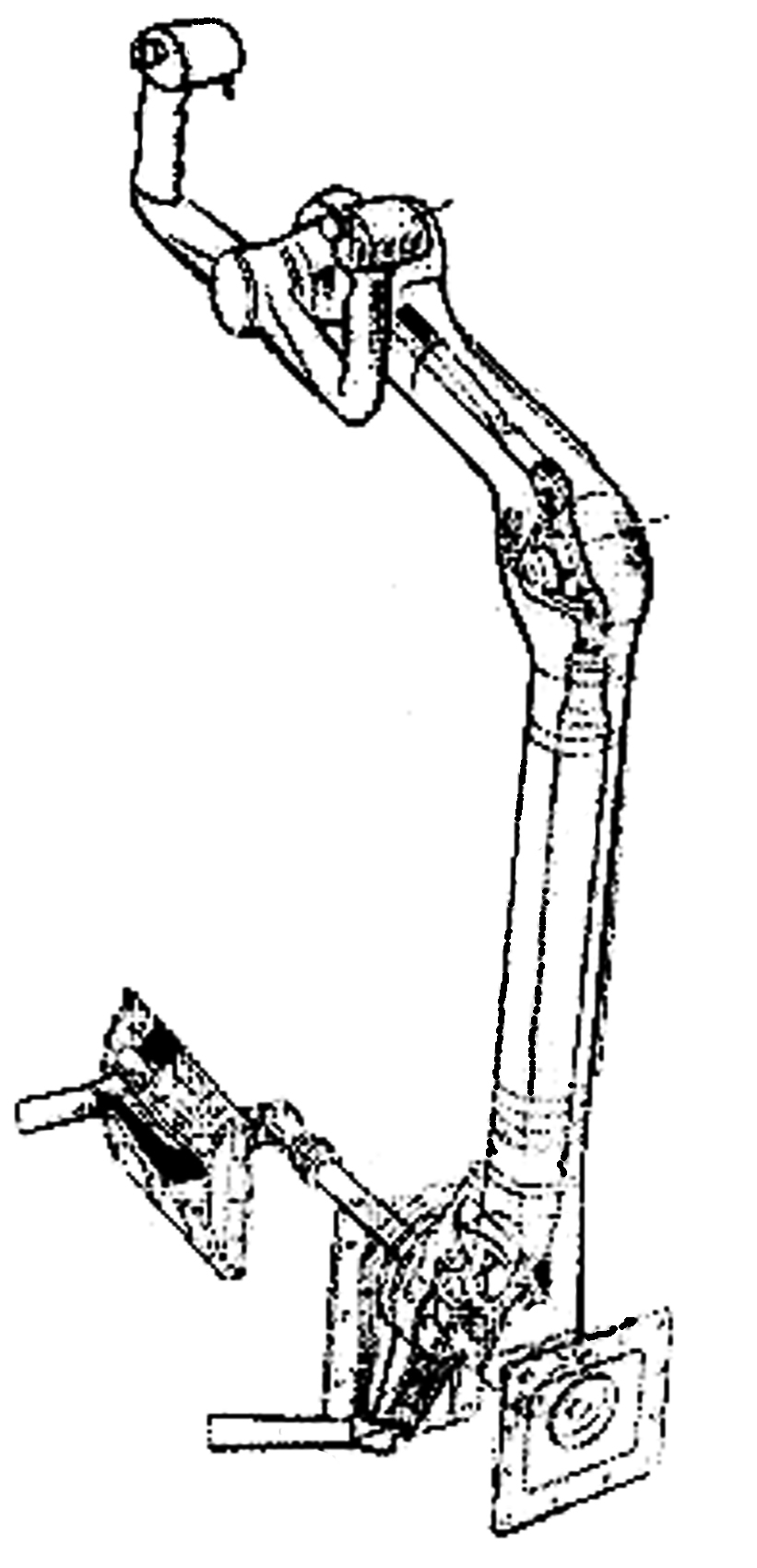
Пульт ножного управления (рис. 13.3) состоит из трех щек 10, между которыми на штангах 11, соединенных с трубой 8, подвешены педали 6.
1
2
4
3
5
6
3
8
6
5
13
7
10
9
11
12
7
Рис. 13.3. Пульт ножного управления:
1, 3, 4 – тяги; 2, 8 – горизонтальные трубы; 5 – секторная качалка; 6 – педаль; 7 – рычаг; 9 – фиксатор; 10 – щеки; 11 – штанги;
12 – защелка; 13 – палец
Каждая педаль пальцем 13, проходящим внутри оси педали, связана с секторной качалкой 5. Верхняя часть секторных качалок тягами 4 и 3 соединена с рычагами горизонтальной трубы 2. На трубе 2 закреплен рычаг 7, к которому присоединена тяга 1, идущая к рулю поворота. При нажатии, например, на левую педаль (от пилота), повернется секторная качалка 5, которая через тягу 3 вызовет поворот трубы 2 против часовой стрелки. Это движение, в свою очередь, через тягу 4 вызовет поворот секторной качалки правой педали в противоположную сторону. Пальцы служат для регулировки педалей по росту пилота. Регулирование выполняется следующим образом: пилот отжимает вбок рычаг защелки 12 и тем самым выводит палец 13 из зацепления с сектором 5. Пружина (на рис. 13.3 не показана) поворачивает педаль в сторону пилота.
Проводка управления (рис. 13.4, 13.5) может быть гибкой, жесткой или смешанной.
1
2
Рис. 13.4. Соединение тросов:
1 – тандер; 2 – коуш
Гибкая проводка управления выполняется из тонких стальных тросов, диаметры которых выбираются в зависимости от действующей нагрузки и не превышают 8 мм. Так как тросы могут работать только на растяжение, то управление рулями в таком случае выполняется по двухпроводной схеме. Отдельные участки тросов соединяются тандерами. Трос к тандерам и секторам крепится коушами (рис. 13.4). Для уменьшения провисания тросов на прямолинейных участках используют текстолитовые направляющие, в местах перегиба троса устанавливают ролики с шариковыми подшипниками (рис. 13.5, а).
а
б
1
8
4
9
5
2
7
3
6
Рис. 13.5. Схема проводок управления:
а – тросовой; б – жесткой;
1 – педаль; 2 – ролик; 3 – трос; 4 – руль поворота; 5 – руль высоты;
6 – качалка; 7 – элерон; 8 – тяги; 9 – штурвал
Жесткая проводка представляет собой систему жестких тяг и качалок (рис. 13.5, б). Качалки служат промежуточными опорами, которые необходимы для деления тяг на сравнительно короткие участки (рис. 13.6). Чем короче тяга, тем меньше вероятность вибрации. Но чем больше разъемов у тяг, тем больше масса проводки.
Тяги 4 имеют трубчатое сечение, изготовляются из дюралюминия, реже из стали. Тяги между собой, а также с качалками соединяются наконечниками 5 (рис. 13.6, б) с одним или двумя ушками, в которые вмонтированы шарикоподшипники, допускающие перекос между осями тяги. Отдельные наконечники имеют резьбу для возможной регулировки длины проводки.
Достоинства жесткой проводки следующие: отсутствие вытяжки проводки при эксплуатации, что исключает возможность образования люфта; малые силы трения; высокая живучесть. Недостатки жесткой проводки по сравнению с гибкой заключаются в большей массе и потребности в значительных объемах для ее размещения.
Гибкую проводку не следует применять при передаче больших усилий, а также в тех случаях, когда от управления требуется большая точность исполнения.
Для поддержания тросов управления и изменения их направления применяют ролики 1, которые прессуют из текстолита-крошки и для уменьшения трения монтируют на шарикоподшипниках (рис. 13.6, а). Кронштейны 2 крепления роликов выполняют обычно литыми из магниевых сплавов.
а
б
1
2
4
3
5
4
Рис. 13.6. Элементы проводки:
а – типовой кронштейн с роликами: 1 – ролики; 2 – кронштейн; б – узел с ролико-
выми направляющими тяг: 3 – направляющие ролики; 4 – тяги; 5 – наконечники
На участках, где тяги совершают прямолинейные движения, устанавливают роликовые направляющие. Больше двух роликовых направляющих на одной тяге ставить нельзя, так как при деформациях самолета это приводит к заеданию проводника. Направляющие имеют фланцы крепления к фюзеляжу. В ушки направляющих, расположенных под углом 120° относительно друг друга, вмонтированы три шарикоподшипника, на наружные кольца которых напрессованы бандажные втулки. Между этими подшипниками и перемещается тяга. Управление механизацией крыла осуществляется или приводом с механической трансмиссией, или силовыми цилиндрами гидросистемы самолета. При механической трансмиссии поверхности управления перемещаются винтовыми механизмами, вращение которых от привода передается через угловые редукторы вращающимися валами. Каждая секция закрылка, интерцептора и другой отклоняющейся поверхности перемещается двумя винтовыми механизмами и силовыми цилиндрами. Приводом пилот управляет дистанционно с помощью механической (тросовой) или электрической проводки.
Расчет на прочность деталей управления. Расчет усилий в элементах основного управления рулем высоты, рулем направления и элеронами производится от расчетных разрушающих нагрузок, действующих на командные рычаги со стороны пилота и определяемых по нормам прочности. Эти силы ограничиваются следующими пределами:
– 1 270–2 350 Н для ручки, штурвальной колонки при управлении рулем высоты;
– 640–1 270 Н для ручки, штурвала при управлении элеронами;
– 1 760–2 450 Н для педалей при управлении рулем направления.
Величина сил Рэ, прикладываемых пилотом к рычагам управления в эксплуатации, определяется величиной шарнирных моментов Мш, углами отклонения рулей р и перемещениями рычагов управления Хру:

Величина
р
/
Хру
определяется при заданной схеме и
размерах элементов проводки управления.
Величина
![]() определяется величиной
определяется величиной
![]() рулей или элеронов, достигаемой в
эксплуатации. Эта величина также
задается нормами прочности. Значение
Рэ
не должно превышать Рэ
/
f.
рулей или элеронов, достигаемой в
эксплуатации. Эта величина также
задается нормами прочности. Значение
Рэ
не должно превышать Рэ
/
f.
Расчет на прочность и вибрации элементов жесткой проводки выполняется в следующей последовательности:
1. Определение нагрузки на командный рычаг по нормам прочности.
2. Определение усилия в тягах по значениям Рр.
Сначала последовательно рассматривается равновесие командного рычага и других узлов. Например, в схеме, представленной на рис. 13.7, рассматривается равновесие ручки.
Из условия равновесия качалки В получается:
S1с
= S2d;
S2
= S1(с/d)
=
![]() .
.

Рис. 13.7. Кинематика управления:
схема для определения передаточного числа
Реакции
в шарнире подвески ручки А
находятся как

Реакции
в шарнире подвески качалки В
находятся как
 и т. д.
и т. д.
Затем на величины этих реакций рассчитываются оси шарниров, проушины кронштейнов узлов подвески А, В и болты их крепления к элементам каркаса планера.
Напряжения в тяге при растяжении находится как

i kВ,
где k – коэффициент ослабления тяг отверстиями под болты и заклепки.
Эти же тяги проверяются на продольный изгиб при сжатии:
кр
=

Усилия в тягах определяются при различных положениях командных рычагов (например, в двух крайних и в нейтральном).
Зная силы, действующие на ручку управления или штурвальную колонку, определяются действующие в их сечениях поперечные силы Q и изгибающие моменты М, при действующих напряжениях в них
 ;
;
![]()
где W – момент сопротивления сечения ручки управления.
3. Подбор сечений или проверки прочности тяг на продольный изгиб и растяжение.
4. Расчет на прочность остальных элементов проводки (шарниров, качалок, рычагов и т. д.). Усилия в рычагах и качалках определяются по нагрузкам от примыкающих к ним тяг.
Болты шарниров подбираются по расчету на срез и смятие, а к болту по каталогу подбирается соответствующий по диаметру подшипник.
5. Проверка тяг на вибрацию. Причиной вибрации тяг являются периодические возбуждающие силы, создаваемые силовой установкой. Наиболее значительны вибрации, вызываемые неуравновешенностью поршневого двигателя и винта. Поэтому для винтовых самолетов размеры тяг подбираются не только из условия их работы на продольный изгиб и растяжение, но и из условия отсутствия резонансных колебаний на основных эксплуатационных режимах работы двигателя.
Колебания тяг относятся к типу поперечных (изгибных) колебаний и поэтому могут происходить без значительного смещения концов тяг (незаметно для пилота).
Вредными последствиями вибрации тяг являются:
– появление трещин и разрушение тяг вследствие усталости металла;
– образование люфтов в шарнирах;
– образование выбоин в тягах управления от ударов о роликовые направляющие при наличии больших зазоров между тягами и направляющими.
Для достаточного удаления от резонанса, вызванного неуравновешенностью двигателя, собственные частоты колебаний тяг не должны лежать в диапазонах
пэ ± 300 кол./мин, 2пэ = ± 400 кол./мин,
где пэ – число оборотов двигателя или винта на основном эксплуатационном режиме работы.
Собственная частота колебаний тяги определяется так же, как для балки на шарнирных опорах:

где
l
– длина тяги, см; Е
– модуль упругости, кг/см2;
I
– момент инерции сечения тяги, см4;
 – масса единицы длины тяги, кг · с2/см2;
F
– площадь
сечения тяги, см2.
– масса единицы длины тяги, кг · с2/см2;
F
– площадь
сечения тяги, см2.
Следует отметить,
что так как (Е/)стали
(Е/)дюраля
2,6 · 109
см, то значения
труб из этих материалов при равных
размерах мало различаются. Учитывая,
что для тонкостенных труб
![]() ;
;
 ,
то
для дюралевых и стальных труб можно
оценить как
,
то
для дюралевых и стальных труб можно
оценить как

где Dср измеряется в миллиметрах, а l – в метрах.
Продольная сила, сжимающая или растягивающая тягу, изменяет частоту собственных колебаний, однако это влияние невелико и учитывается широтой диапазонов ± 300 и ± 400 кол./мин.
Влияние продольной силы на выражает формула

где
Р
– усилие, действующее в тяге; Рэ
=
![]() – критическая сила,
= 1; при сжатии тяги применяется знак
«–», при растяжении – знак «+».
– критическая сила,
= 1; при сжатии тяги применяется знак
«–», при растяжении – знак «+».
Для того чтобы не снижалась из-за упругих смещений опор, качалки и опорные узлы должны иметь значительную жесткость.
Последовательность расчета на прочность элементов тросовой проводки такая же, как и жесткой. Отличие состоит в необходимости учета усилия от предварительной затяжки.