

1.4. Статический расчет замкнутой системы оппн I
Среди задач, которые требуется решить при проектировании преобразователя постоянного напряжения, есть задача выполнения статического расчета замкнутой системы проектируемого преобразователя.
Статический расчет проводится после того, как выполнен расчет силовой схемы преобразователя и выбраны все его элементы.
Цель статического расчета – определение коэффициента усиления предварительного усилителя, который обеспечит требуемую точность поддержания напряжения нагрузки. Как известно, требуемая точность поддержания напряжения нагрузки приводится в техническом задании на проектирование преобразователя.
Схема проектируемого ОППН I, работающего в режиме стабилизатора, представлена на рис. 14.
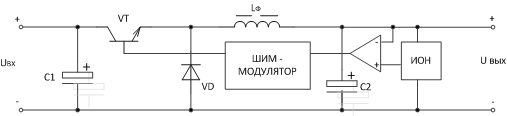
Рис. 14. Схема ОППН I с обратной связью по напряжению нагрузки
Выходное напряжение сравнивается с напряжением источника опорного напряжения ИОН, полученная разность усиливается усилителем и возбуждает ШИМ, который в свою очередь управляет транзистором. Энергия, запасенная в дросселе, зависит от соотношения времени, когда ключ открыт, и времени, когда он закрыт. При непрерывном характере тока нагрузки ток через дроссель протекает как на интервале импульса (через транзистор VT), так и на интервале паузы (через диод VD).
Для выполнения статического расчета замкнутой системы необходимы следующие исходные данные:
номинальное напряжение нагрузки, Uнг N=… В;
номинальный ток нагрузки, I нг N=… А;
эквивалентное сопротивление схемы, Rсх=… Ом;
отклонение напряжения источника питания ±ΔUвх%=…%;
допустимое отклонение напряжения нагрузки ±ΔUнг%= …. %;
регулировочная характеристика схемы управления γ = f(Ūу) (рис. 15);
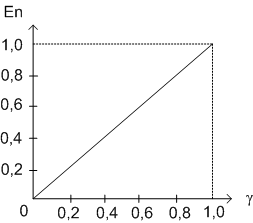
регулировочная характеристика силовой схемы преобразователя
Ēпр= f(γ) (рис. 16).
|
|
Рис.15. Регулировочная характеристика схемы управления ОППН I |
Рис. 16. Регулировочная характеристика силовой схемы ОППН I |
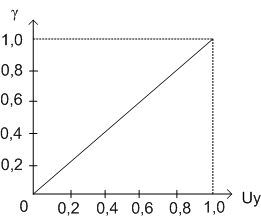
γ = tи/T – коэффициент скважности;
tи – длительность импульса;
T = 1/fp – период следования импульсов управления;
Ūу = Uу/Uоп max – относительное значение напряжения управления на входе системы управления;
Uоп max – максимальное значение опорного сигнала системы управления;
Ēпр= Епр/Епр0 – относительное значение ЭДС на выходе преобразователя;
Епр0 – ЭДС холостого хода на выходе преобразователя.
Временные диаграммы, поясняющие работу схемы управления
преобразователя (рис. 17, а), приведены на рис.17, б, в.
Определим требуемую величину ЭДС преобразователя с учетом отклонения напряжения источника питания. Примем значение тока нагрузки равным номинальному значению:
Епр = Uвх minγmax = Uнг N + Iнг N Rcx + ΔUкэ.нас, (16)
где Uвх min = Uвх N- ΔUвх = Uвх N [1-( ΔUвх%)/100];
γmax – максимальное значение коэффициента скважности;
Rcx = RLф – эквивалентное сопротивление схемы;
ΔUкэ.нас – падение напряжения на открытом транзисторе.
Максимальное значение коэффициента скважности
γmax = (Uнг N + Iнг N Rcx + ΔUкэ.нас)/ (Uвх min). (17)
Епр0 – это ЭДС холостого хода при номинальном значении входного напряжения (Uвх N) и коэффициенте скважности, равном единице, т.е. γ = 1.
Следовательно: Епр0 =Uвх N, а Ēпр= Епр/Uвх N.
Из рис. 15 следует, что Ūу= γ, а Ūу max = γmax, следовательно:
Uу max = Ūу max Uоп max.
Величина Uоп max выбирается при разработке системы управления. Наиболее приемлемые значения Uоп max = 5 В или Uоп max =10 В.
Если принято Uоп max = 5 В, то Uу max = 5Ūу max = 5γmax В.
Определив величину Uу max и величину Епр, можно определить коэффициент усиления преобразователя, kпр:
kпр= Епр/ Uу max . (18)
Далее определяем общий коэффициент усиления системы K при реализации обратной связи по напряжению нагрузки.
Структурная схема этой системы приведена на рис. 18.
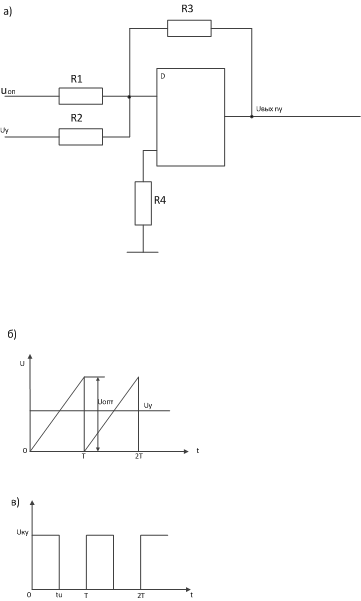
Рис. 17. Формирователь импульсов управления (Uи.у):
а – схема компаратора; б, в – временные диаграммы, поясняющие его работу.
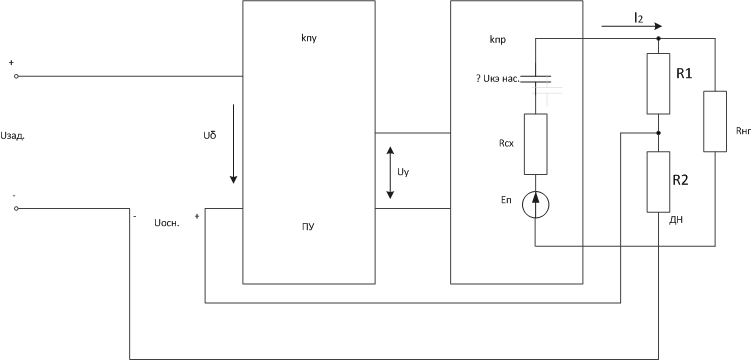
Рис.18. Структурная схема замкнутой системы ОППН:
ПУ –предварительный усилитель;
ПР – преобразователь вместе с системой управления;
ДН – датчик напряжения;
Uδ = Uз- Uосн – напряжение рассогласования;
Uз – напряжение задания;
Uосн – напряжение обратной связи;
Uу – напряжение управления на входе преобразователя;
kп.у – коэффициент усилия предварительного усилителя;
kпр – коэффициент усиления преобразователя;
kд.н – коэффициент передачи датчика напряжения;
Епр – ЭДС на выходе преобразователя;
Rсх – активное сопротивление элементов схемы, по которым протекает ток нагрузки;
Соотношения между параметрами схемы:
Uδ=Uз–Uосн ; (19) Uосн=kд.нUнг; (20)
Uу=kп.уUδ; (21) Епр=kпрUу ; (22) Епр=Uнг N+Iнг NRcx+ΔUкэ.нас= Uнг N + ΔUнг.р , (23)
где ΔUнг.р = Iнг NRcx+ΔUкэ.нас – падение напряжения на элементах схемы при разомкнутой системе.
Решая уравнения (19) – (23), получим:
(Uз - kд.н Uнг.N)kп.уkпр = Uнг N+ ΔUнг.р
Uнг N (1 + kп.уkд.нkпр) = kп.уkпрUз + ΔUнг.р
Uнг N = ((kп.уkпр)Uз /(1 + К)) - ΔUнг.р/(1 + K), (24)
где ((kп.уkпр)Uз/(1+К)) = Uпр0 – напряжение холостого хода преобразователя при замкнутой системе.
ΔUнг.р/(1 + К) = ΔUнг.з – отклонение напряжения нагрузки при замкнутой системе.
Величина К определяется из соотношения:
ΔUнг.р/ ΔUнг.з = К + 1. (25) К = (ΔUнг.р/ ΔUнг.з) – 1 = kп.уkд.н kпр. ххх (26)
Далее необходимо определить значение коэффициентов kпу и kдн. Поскольку неизвестны значения двух коэффициентов, необходимо еще одно уравнение в дополнение к уравнению:
kп.у kд.нkпр = К. ххх
Это уравнение можно вывести из вышеприведенных уравнений:
kп.у = Uy/Uδ = Uу max/( Uз - kд.нUнг N) . (27)
Приняв Uз = 5 В и зная значения Uу max и Uнг N, можно рассчитать kп.у и kд.н. Для проверки правильности выполненных расчетов необходимо рассчитать значение Uнг N по формуле (24).