

Принцип построения асни
При разработке АСНИ необходимо решать следующие задачи:
1. Автоматизация сбора измерительной информации.
Для автоматизации сбора информации необходимо обеспечить унификацию выходных сигналов датчиков, программно-управляемую коммутацию этих сигналов на общий канал связи.
Обеспечить типовой набор операций, выполняемых в измерительном канале: предварительное усиление сигналов, фильтрацию, аналого-цифровое преобразование.
В процессе функционирования системы должны отсутствовать ручные операции регулировки и настройки.
2. Автоматизация передачи информации из измерительного канала
в цифровое вычислительное устройство (ЭВМ).
Для решения этой задачи необходимо обеспечить согласование измерительного канала с информационной магистралью вычислительного устройства.
Технические средства согласования и протокол их работы называют интерфейсом. Интерфейс определяет формат передаваемой и принимаемой информации, уровни сигналов, организацию управляющих сигналов и временные соотношения для них.
3. Автоматизация обработки измерительной информации.
Эта задача решается путем подключения к измерительному каналу вычислительной техники. ЭВМ управляет по отлаженному алгоритму ходом выполнения экспериментов и обработки его результатов.
4. Автоматизация документальной регистрации.
Автоматизация этого процесса обеспечивается путем оснащения системы устройствами вывода текстовой и графической информации.
Решение указанных выше задач необходимо производить в рамках единого системного подхода, который должен обеспечить согласованную работу всех программируемых компонентов автоматизированной системы.
АСНИ можно рассматривать с двух позиций: ее функциональных возможностей и ее функционирования.
Функциональная структура АСНИ
С функциональной точки зрения АСНИ ОР представляет сложную систему, в которой выполняются два класса функций: целевые, предписанные целью исследований при обработке, и собственные - функции организации и управления АСНИ.
Выполнение этих функций возлагается на ряд подсистем. Обобщенная функциональная структура АСНИ с выделением задач, решаемых каждой из
подсистем, представлена на рис. 7.1.
 063
063
К особенностям функционирования АСНИ относится, во-первых, то, что АСНИ всегда будет ≪человеко-машинной≫ системой, так как независимо от степени развития автоматизации проведения эксперимента последнее решение остается за исследователем.
Он должен иметь возможность планировать ход измерений и анализа результатов, при необходимости проводить их корректировку и др.
Информативно-управленческое взаимодействие подсистем и исследователя в рамках АСНИ ОР показано на рис. 7.2.
 064
064
Во-вторых, АСНИ это развивающаяся система, допускающая совершенствование методов и средств проведения исследований и решение новых задач.
Структура обеспечивающей части АСНИ
Структура обеспечивающей части включает присущий автоматизированным системам набор основных компонентов, к которым относятся: техническое обеспечение, математическое, программное, информационное и методическое обеспечение.
Содержательный состав основных компонент отражает специфику задач, решаемых в исследованиях.
Обобщенная структура и состав обеспечивающей части АСНИ ОР показан на рис. 7.3.
 065
065
Ядром обеспечивающей части является техническое обеспечение, от состава и технических возможностей которого зависит реализация решаемых задач.
В качестве устройства обработки информации применяют персональный компьютер. Совокупность устройств обработки информации и программно-математического обеспечения носит название вычислительной среды, посредством которой достигается автоматизация приема и обработки информации, поступающей с исследовательского стенда.
В свою очередь, исследовательский стенд АСНИ представляет собой программно-управляемое технологическое оборудование, осуществляющее процесс обработки с заданными технологическими параметрами.
Физические значения, сопутствующие текущему состоянию процесса резания, отслеживаются датчиками, которыми оснащен исследовательский стенд.
По измерительным каналам информация передается в вычислительную среду по
спроектированным для этих целей алгоритмам.
Таким образом, все обеспечивающие части АСНИ находятся в тесном взаимодействии, которое подчиняется общей методике достижения поставленных целей.
Общая методика (методическое обеспечение) включает ряд частных методик, присущих функциональным подсистемам.
Как происходит передача информации?
Для получения ЭВМ количественных характеристик, соответствующих каким-либо процессам, происходящим в зоне резания, требуется следующее.
1.Наличие чувствительного элемента, способного изменять свои выходные параметры в зависимости от воздействующего на него физического явления.
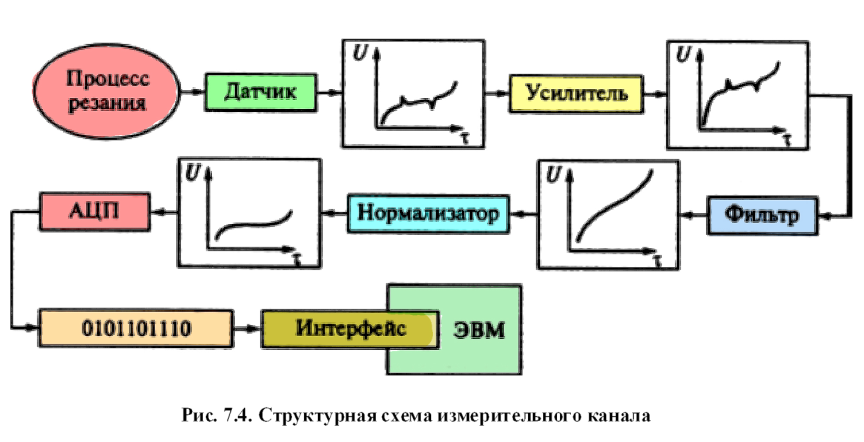
Таким элементом является первичный преобразователь информации — датчик. На выходе датчик имеет изменяющийся параметр, как правило, в виде напряжения или силы тока.
Количественная информация о процессах, происходящих в зоне резания, таким образом, будет заключена в аналоговой величине сигнала, вырабатываемого датчиком.
2. Величина этого сигнала может быть недостаточной для транспортирования по линиям связи до стороны, принимающей информацию.
Следовательно, на следующем этапе передачи необходимо усилить сигнал, вырабатываемый датчиком, до уровня, приемлемого для передачи на заданное расстояние, которое будет определяться взаимным расположением обрабатывающего оборудования и принимающей ЭВМ и обусловливать активно-емкостное сопротивление линии передачи.
Естественно, чем длиннее линия связи, тем большим активным сопротивлением она обладает, и, как следствие, возникает необходимость увеличения усиления сигнала.
Емкостное сопротивление влияет на быстродействие ≪перезарядки≫ линии передачи
последующим сигналом.
3.Сигнал, приходящий по линиям передачи, расположенным вблизи мощных энергопотребителей, например металлорежущих станков, может быть загрязнен так называемыми синфазными наводками.
Так, например, отрезок силового кабеля длиной 1 м создает наводки порядка 1мВ/1кВт передаваемой мощности переменного тока на расположенную параллельно на расстоянии 1 м часть линии передачи такой же длины. Кроме того, включение (выключение) мощных энергопотребителей также может приводить к появлению пиковых напряжений и проникновению их в линии передачи.
Следовательно, усиленный сигнал необходимо отфильтровать от нежелательных помех.
4. Аналоговый сигнал, пришедший с датчиков через вышеназванные устройства, должен быть соответствующим образом подготовлен для преобразования в цифровой вид.
Такого рода подготовка включает в себя удаление из сигнала шумов усилителей, т. е. выделение сигнала в его собственном диапазоне изменения (динамическом диапазоне) и доведение значения этого диапазона до амплитудно-частотной характеристики преобразователя сигнала в цифровую форму. Это достигается введением в измерительный канал электронного устройства типа нормализатора.
5. Нормализованный сигнал должен быть представлен в цифровом виде, что выполняется специфическим электронным устройством — аналого-цифровым преобразователем (АЦП), на выходе которого получается цифровой эквивалент поданной на вход аналоговой величины.
6. Заключительным этапом передачи информации из зоны резания в ЭВМ является собственно ввод цифровой информации после аналого-цифрового преобразования в ЭВМ.
В ЭВМ информация поступает через порт ввода и может быть занесена как в оперативную память, так и на внешнее запоминающее устройство. При этом размещение информации в ЭВМ, управление работой АЦП, подключение того или иного датчика к измерительному каналу и прочие функции выполняет ЭВМ по соответствующим алгоритмам.
Управление внешними по отношению к ЭВМ устройствами (АЦП, коммутатор и т. п.) осуществляется через специальный комплекс электронных средств — интерфейс.
Пример механизма передачи информации из зоны резания по силоизмерительному каналу с графической иллюстрацией выполняемых процедур в обобщенном виде показан на рис. 7.4.
Для выявления связи между рядом физических явлений, сопровождающих процесс резания, и состоянием объекта используют набор датчиков, реагирующих на эти явления.
Измерительная часть технического обеспечения АСНИ ОР должна включать в себя наборизмерительных каналов передачи информации, соответствующих применяемым датчикам. Механизм передачи информации по каждому каналу аналогичен вышеописанному
 066
066
Техническая реализация
При комплексных исследованиях процесса резания, последний должен быть подвергнут всестороннему анализу с помощью информации, полученной от ряда датчиков, каждый из которых в отдельности передает информацию о какой-либо стороне поведения изучаемого объекта.
Реализация такого подхода в рамках АСНИ ОР предусматривает эксплуатацию специального устройства технического обеспечения, в функции которого входят процедуры, способствующие автоматизации измерений:
- выработка сигналов отсутствия и наличия резания;
- выработка сигналов об аварийных ситуациях при резании;
- выбор канала для подачи в тракт усиления—нормализации—
аналого-цифрового преобразования;
- согласование по АЧХ выхода подключенных датчиков с быстродействием,
принятым АЦП и его динамическим диапазоном;
- передача цифровой информации в ЭВМ и другие процедуры.
Выполнение всех процедур производит устройство сопряжения с объектом (УСО).
Под объектом в АСНИ ОР принят комплекс аналоговых величин, характеризующих состояние процесса резания в текущий момент времени.
Комплекс аналоговых величин получают на выходе датчиков, которыми оснащен исследовательский стенд.
В АСНИ ОР может быть принят следующий набор датчиков:
- силоизмерительные по ортогональным осям;
- измеритель крутящего момента;
- вибрационный;
- датчик ЭДС резания;
- датчики тока в цепях приводов по соответствующим координатам металлорежущего оборудования.
Для решения поставленных задач набор датчиков может быть расширен, а УСО в АСНИ ОР должно отвечать требованиям, изложенным в техническом задании.
Основными исходными данными для разработки УСО являются характеристики источников аналоговойинформации, т. е. сигналов:
а) высокочастотного вибродатчика — диапазон частот от 3 Гц до 20 кГц, переменное напряжение сигнала в диапазоне от 1 до 10 мВ;
б) датчиков, встраиваемых в силовые цепи станков, — диапазон частот от 0 до 100 Гц, внутреннее сопротивление 0,1 Ом, постоянный ток в диапазоне от 1 до 75 мА;
в) ЭДС резания — диапазон частот от 0 до 50 кГц, внутреннее сопротивление 50 Ом, постоянное напряжение в диапазоне от 1 до 100 мВ;
г) силомоментных датчиков — диапазон частот от 0 до 1000 Гц, внутреннее сопротивление 50—100 Ом, переменный ток в диапазоне от 1 мкА до 1 мА.
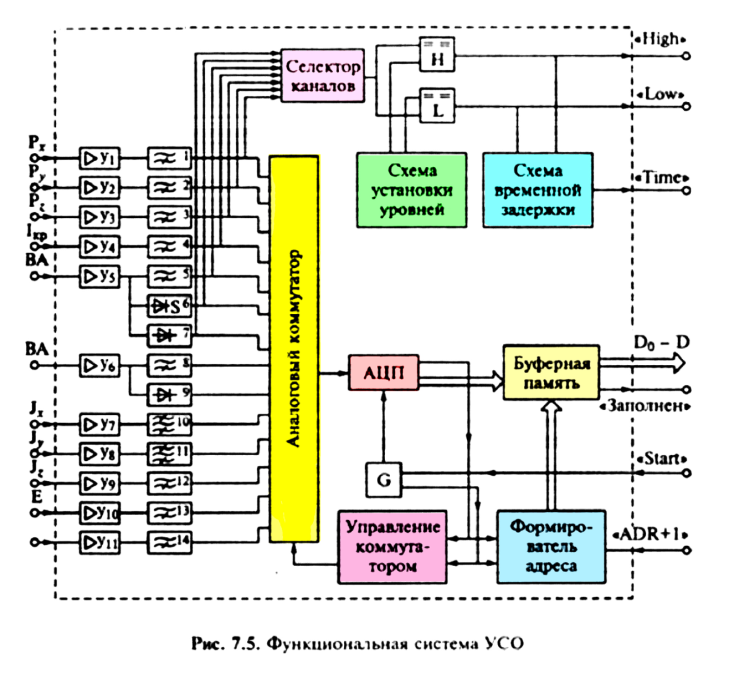
Устройство сопряжения с объектом (УСО) выполняется в виде блочно-модульной структуры вариантного исполнения.
В состав УСО входят:
- модуль обработки сигналов вибрационных датчиков;
- модуль обработки сигналов силомоментных датчиков;
- модуль обработки сигналов датчиков, устанавливаемых в силовых цепях станков;
- модуль аналого-цифрового преобразователя с коммутатором каналов;
- модуль обработки сигналов ЭДС резания;
- модуль определения наличия резания.
Функциональная схема УСО показана на рис. 7.5.
УСО имеет разъемы для подключения источников аналоговой информации от датчиков и унифицированные разъемы для подключенияаналоговой регистрирующей аппаратуры (осциллографы, вольтметры и др.) к любому усилительному тракту. Кроме того, предусмотрены органы ручной регулировки и управления:
- регулятор напряжения низкого уровня контрольного сигнала -≪L≫;
- регулятор напряжения высокого уровня контрольного сигнала -≪Н≫;
- дискретный переключатель выбора номера канала;
- дискретный переключатель коэффициента ослабления сигнала, поступающего по вибрационным каналам, и др.
 067
067
УСО обеспечивает предварительное преобразование принятого аналогового сигнала по каждому из каналов, необходимое для последующего 12-разрядного аналого-цифрового преобразования.