

5.2 Програма роботи
5.2.1 Вивчити лабораторну установку та призначення її елементів.
5.2.2 Налаштувати перетворювач DCS800 №3 за допомогою програми Drive Windows LIGHT для роботи в режимі двозонної СПР та перетворювач №4 на режим джерела моменту.
5.2.3 Зняти механічні та електромеханічні характеристики електроприводу при П- та ПІ- регуляторах швидкості.
5.2.4 Зняти графіки перехідних процесів в електроприводі для режимів пуску без навантаження в першу та другу зони при П- та ПІ- регуляторах швидкості, а також накидання та скидання навантаження.
5.2.5 Розрахувати статичні теоретичні характеристики та побудувати їх в одній системі координат з експериментально знятими.
5.2.6 Розробити розрахункову структурну схему дискретної системи керування в середовищі Simulink та дослідити перехідні процеси аналогічні пунктам 5.2.4.
5.2.7 Оформити звіт по роботі. Зробити висновки по роботі.
5.3 Методичні вказівки
5.3.1 Для виконання пункту 5.2.2 програми
5.3.1.1 Підключити лабораторний стенд до напруги живлення: ввімкнути рубильник SQ1 та автоматичні вимикачі QF7-QF10.
5.3.1.2 Підключити інтерфейсні кабелі від перетворювачів DCS800 №3 та №4 до ПК та запустити програму Drive Window LIGHT.
5.3.1.3 Налаштувати перетворювач №3, який живить двигун М1, для реалізації двозонної системи керування швидкістю ДПС з НЗ.
5.3.1.3.1 Запустити майстер налаштувань Wizard.
5.3.1.3.2 Натиснути кнопку Start.
5.3.1.3.3 На закладці Name plate data ввести наступні паспортні дані:
9902- 220 В
9903- 35 А
9904- 1550 об/хв
2001- -1600 об/хв.
2002- 1600 об/хв.
9911 – 0.75А
3009 – 200%
3016 – 2400 об/хв
9910 - 400 В
та натиснути кнопку NEXT.
5.3.1.3.4 В вікні Macro assistant вибрати у випадаючому меню значення NotUsed та натиснути кнопку NEXT .
5.3.1.3.5 У вікні Autotuning field current controller вибрати значення для параметра 9912 – OnBoard та для параметра 4401 – EMF, та натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора струму збудження 4402, 4403 та натиснути кнопку NEXT .
5.3.1.3.6 У вікні Autotuning armature current controller натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора струму якоря 4306, 4307, ідентифіковані параметри якірного кола 4309 та 4310 та натиснути кнопку NEXT .
5.3.1.3.7 У вікні Speed feedback assistant змінити значення параметра 5003 на Encoder та натиснути кнопку Start. Далі необхідно ввести параметри енкодера – кількість імпульсів на оберт (параметр 5004), в даному випадку 2500, та обрати режим вимірювання енкодеру (параметр 5002), в даному випадку А+-/В+-. Та натиснути кнопку Start.
УВАГА! Під час виконання процедури налаштування зворотного зв’язку за швидкістю двигун почне обертатись. Переконайтеся в тому що в зоні знаходження двигуна немає людей та зайвих предметів.
Після закінчення процедури налаштування натиснути кнопку NEXT.
5.3.1.3.8 У вікні Autotuning speed controller обрати повзунком значення Normal для типу перехідного процесу та натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора швидкості 2403, 2409 та натиснути кнопку NEXT.
5.3.1.3.9 У вікні Field weakening assistant (рис. 5.10) вибрати значення для параметра 4401 - EMF. Та натиснути кнопку Start. Записати параметри 4409 та 4410, що відповідають за П та І складову регулятора ЕРС.
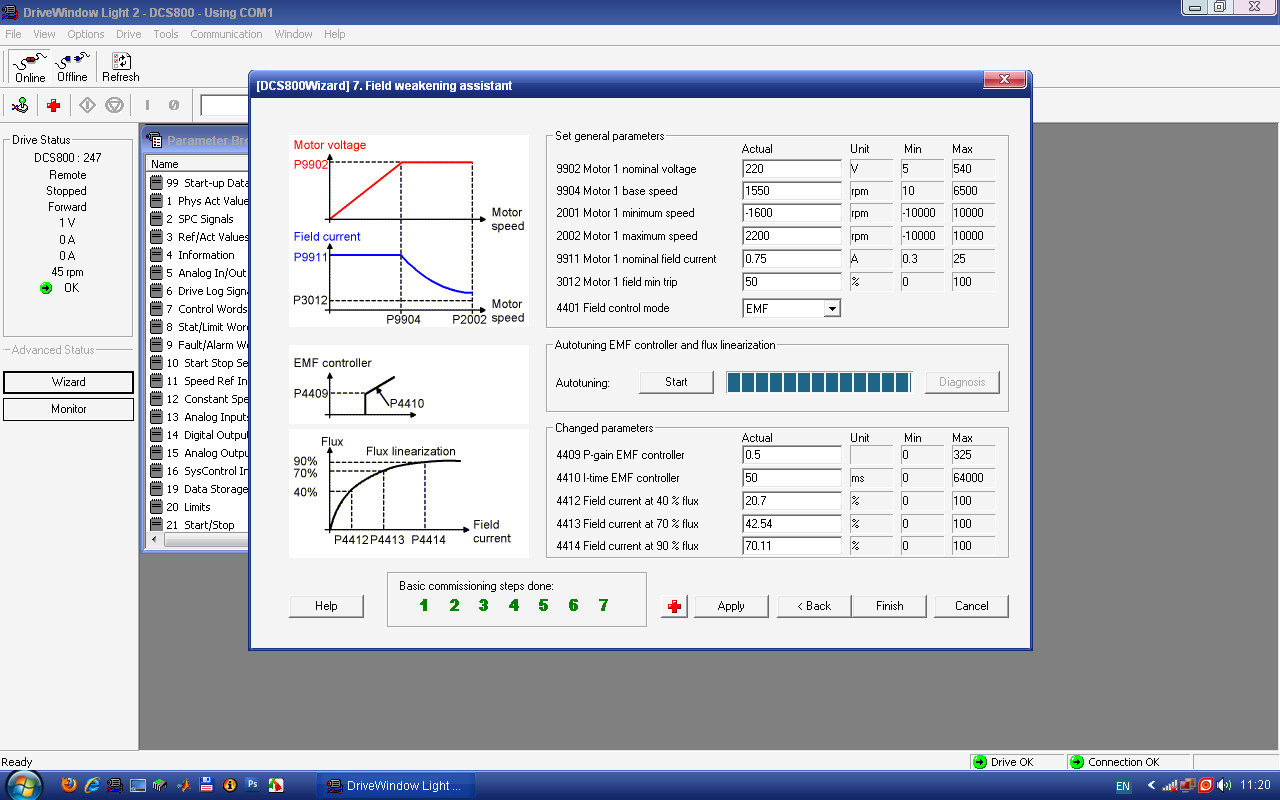
Рисунок 5.10 ― Вікно налаштування регулятора ЕРС для двозонної системи керування
5.3.1.3.10 Натиснути Finish.
5.3.1.3.11 Натиснути Сlose.
5.3.1.4 Налаштувати перетворювач №4, який живить двигун М2, для реалізації одноконтурної системи керування струмом якоря ДПС з НЗ.
5.3.1.4.1 Перейти до Parameter Browser та змінити параметр 2601 на значення Speed.
5.3.1.4.2 Запустити майстер налаштувань Wizard.
5.3.1.4.3 Натиснути кнопку Start.
5.3.1.4.4 На закладці Name plate data ввести наступні паспортні дані:
9902- 220 В
9903- 20 А
9904- 1450 об/хв
2001- -1600 об/хв.
2002- 1600 об/хв.
9911 – 0.84 А
3009 – 200%
3016 – 2400 об/хв
9910 - 400 В
та натиснути кнопку NEXT.
5.3.1.4.5 В вікні Macro assistant вибрати у випадаючому меню значення NotUsed та натиснути кнопку NEXT.
5.3.1.4.6 У вікні Autotuning field current controller вибрати значення для параметра 9912 – OnBoard та для параметра 4401 – Fix, та натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора струму збудження 4402, 4403 та натиснути кнопку NEXT.
5.3.1.4.7 У вікні Autotuning armature current controller натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора струму якоря 4306, 4307, ідентифіковані параметри якірного кола 4309 та 4310 та натиснути кнопку NEXT.
5.3.1.4.8 У вікні Speed feedback assistant змінити значення параметра 5003 на EMF та натиснути кнопку Start.
УВАГА! Під час виконання процедури налаштування зворотного зв’язку за швидкістю двигун почне обертатись. Переконайтеся в тому що в зоні знаходження двигуна немає людей та зайвих предметів.
Після закінчення процедури налаштування натиснути кнопку NEXT.
ЗАУВАЖЕННЯ Хоча в одно контурній системі керування струмом якоря (моментом) використовується лише зворотний зв'язок за струмом якоря, все ж необхідно налаштувати зворотний зв'язок за швидкістю та регулятор швидкості, а згодом розімкнути коло зворотного зв’язку за швидкістю та подавати завдання в контур струму (п. 5.3.1.4.12).
5.3.1.4.9 У вікні Autotuning speed controller обрати повзунком значення Normal для типу перехідного процесу та натиснути клавішу Start. Після завершення процедури автоналаштування записати отримані параметри регулятора швидкості 2403, 2409 та натиснути кнопку NEXT.
5.3.1.4.10 У вікні Field weakening assistant натиснути клавішу Finish.
5.3.1.4.11 Натиснути Close.
5.3.1.4.12 Перейти до Parameter Browser та змінити параметр 2601 на значення Torque, а параметр 2604 на значення TorqSel2601.