

4.3.4 Для виконання пункту 4.2.5 програми
Статичні експериментальні характеристики системи будуються на основі даних таблиці 5. При цьому по осі ординат відкладається значення кутової швидкості в рад/с, а по осі абсцис – момент в Нм. Перерахунок об/хв в рад/с здійснюється згідно формули
,
а момент в Нм визначається добутком значення моменту у відсотках на значення номінального моменту двигуна.
Номінальний момент двигуна М2 визначається
 .
.
Розрахунок теоретичних характеристик (при ПІ-регуляторі струму якоря) здійснюється згідно рівняння
.
Всі графіки представити на одному рисунку.
4.3.5 Для виконання пункту 4.2.6 програми
Структурна схема дискретної системи керування в середовищі Simulink відповідно до рис.4.6 зображена на рис. 4.7. Структурні схеми підсистем завдання моменту та зміни швидкості подані на рис 4.8 та 4.9.
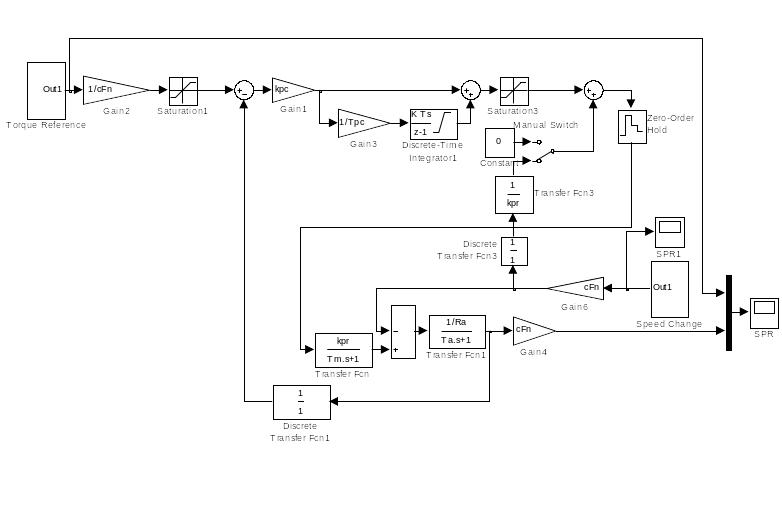
Рисунок 4.7 – Структурна схема дискретної системи керування в середовищі Simulink
Перемикач Manual Switch дозволяє ввести сигнал компенсації ЕРС у коло струму якоря. Імпульсні ключі Т0 (рис. 4.6) на схемі реалізуються дискретними передаточними функціями з одиничним коефіцієнтом підсилення. В усіх дискретних елементах системи, а також в екстраполяторі нульового порядку необхідно задати такт квантування Т0. В дискретному інтеграторі коефіцієнт підсилення обирається одиничним. Усі параметри, що прописані в схемі літерами, повинні бути задані в m-файлі. При моделюванні необхідно задати наступні параметри системи:
Tm=0.01с – мала стала часу Тµ;
To=0.1∙Tm – період квантування Т0;
cFn=1.516 Вс – добуток конструктивної сталої на номінальний потік збудження;
kpc, Tpc – коефіцієнт підсилення та стала часу ПІ-регулятора струму якоря (див. пункт 4.3.1.4.7);
kpr=23 – коефіцієнт передачі перетворювача;
Ra=1.1 Ом – опір якірного кола;
La=0.028 Гн – індуктивність якірного кола;
Ta=La/Ra – стала часу якірного кола;
wn=151,8 рад/с, Mn=30,31 Нм – номінальні швидкість і момент.
В блоці Saturation3 та Discrete-Time integrator1 необхідно задати обмеження вихідних сигналів від -10 до 10. У випадку неправильно заданих обмежень може з’явитися статична похибка. Для усунення недоліку слід збільшити зону обмеження, або зменшити швидкість. Ланка Saturation1 задає обмеження завдання струму якоря на рівні від –Mn/cFn до Mn/cFn.
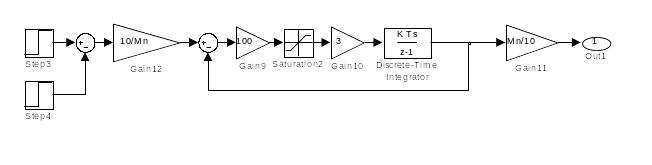
Рисунок 4.8 – Структурна схема підсистеми завдання моменту (Torque Reference) в середовищі Simulink
Схема на рис. 4.8 представляє собою блок завдання моменту. Ланки Step3 та Step4 дозволяють змінювати величину завдання моменту (їх значення задаються в одиницях вимірювання моменту). Фрагмент схеми Gain9, Saturation2, Gain10 та Discrete-Time Integrator реалізують задатчик інтенсивності. У ланці Saturation2 задається обмеження від -10 до 10. Ланка Gain10 визначає кут наростання сигналу на виході інтегратора (величину необхідно обрати такою, щоб кут наростання відповідав експериментальним графікам). Збільшення величини Gain10 призводить до стрімкішого наростання. Ланка Gain12 масштабує сигнал завдання (максимум 10В при номінальному моменті), що дозволило зменшити величину Gain9 та обмеження в Saturation2. Ланка Gain11 є зворотною до ланки Gain12, тобто, дозволяє отримати вихідний сигнал завдання в абсолютних одиницях моменту. Дискретний інтегратор має такт квантування Т0 та одиничний коефіцієнт підсилення. Вихід інтегратора не обмежується. Кількість ланок Step має відповідати кількості змін завдання моменту під час експерименту.
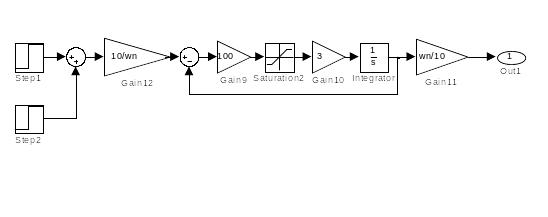
Рисунок 4.9 – Структурна схема підсистеми зміни швидкості (Speed Change) в середовищі Simulink
Структурна схема симулює лінійно-наростаючу (або спадаючу) зміну швидкості, або реверс в залежності від значень Step1 та Step2. Ланки Gain9, Saturation2, Gain10 та Integrator реалізують задатчик інтенсивності швидкості, аналогічний як і у попередній схемі. Обмеження у ланці Saturation2 обираються на рівні від -10 до 10. Значення швидкості задаються в ланках Step у одиницях вимірювання швидкості. Величина Gain10 вибирається такою, щоб наростання (спадання) швидкості відповідало експериментальним графікам.