

3.3.5 Для виконання пункту 3.2.4 програми з п-регулятором та без компенсації ерс
3.3.5.1 У вікні Parameter Browser змінити значення параметра 43.05 Сontrol Mode Select зі значення Standard на значення NoFeedFwd.
3.3.5.2 Зняти динамічні характеристики за методикою, аналогічною, як і для П- регулятора (пункт 3.3.4), згідно варіантів таблиці 3.
3.3.5.3 Повернути значення параметра 43.05 на значення Standard.
3.3.6 Для виконання пункту 3.2.4 програми з пі-регулятором з компенсацією ерс
3.3.6.1 Відкрити майстер налаштувань Wizard.
3.3.6.2 Вибрати пункт 6 Autotuning speed controller.
3.3.6.3 Для реалізації ПІ- регулятора змінити значення параметру 2409 на значення, записане при виконанні пункту 3.3.1.3.8, та зберегти зміни натиснувши кнопку Apply.
3.3.6.4 Натиснути кнопку Finish та вийти з майстра налаштувань Wizard (кнопка Close).
3.3.6.5 Зняти динамічні характеристики за методикою аналогічною, як і для П- регулятора (пункт 3.3.4), згідно варіантів таблиці 3.
3.3.7 Для виконання пункту 3.2.4 програми з пі-регулятором та без компенсації ерс.
3.3.7.1 У вікні Parameter Browser змінити значення параметра 43.05 Сontrol Mode Select зі значення Standard на значення NoFeedFwd.
3.3.7.2 Зняти динамічні характеристики за методикою, аналогічною, як і для П- регулятора (пункт 3.3.4), згідно варіантів таблиці 3.
3.3.7.3 Повернути значення параметра 43.05 на значення Standard.
3.3.8 Для виконання пункту 3.2.5 програми
3.3.8.1 Для настроювання перетворювача №3 для роботи з датчиком швидкості необхідно відкрити майстер налаштувань Wizard та провести процедури налаштування 5 Speed feedback assistant та 6 Autotuning speed controller.
3.3.8.2 В процедурі налаштування зворотного зв’язку за швидкістю Speed feedback assistant (рис. 3.11) необхідно вибрати джерело сигналу зворотного зв’язку (параметр 5003), в даному випадку - значення Encoder.
Далі необхідно ввести параметри енкодера – кількість імпульсів на оберт (параметр 5004), в даному випадку 2500, та обрати режим вимірювання енкодеру (параметр 5002) , в даному випадку А+-/В+-. Натиснути кнопку Start. Після чого відбудеться процес налаштування зворотного зв’язку за швидкістю.
УВАГА! Під час виконання процедури налаштування зворотного зв’язку за швидкістю двигун почне обертатись. Переконайтеся в тому, що в зоні знаходження двигуна немає людей та зайвих предметів.
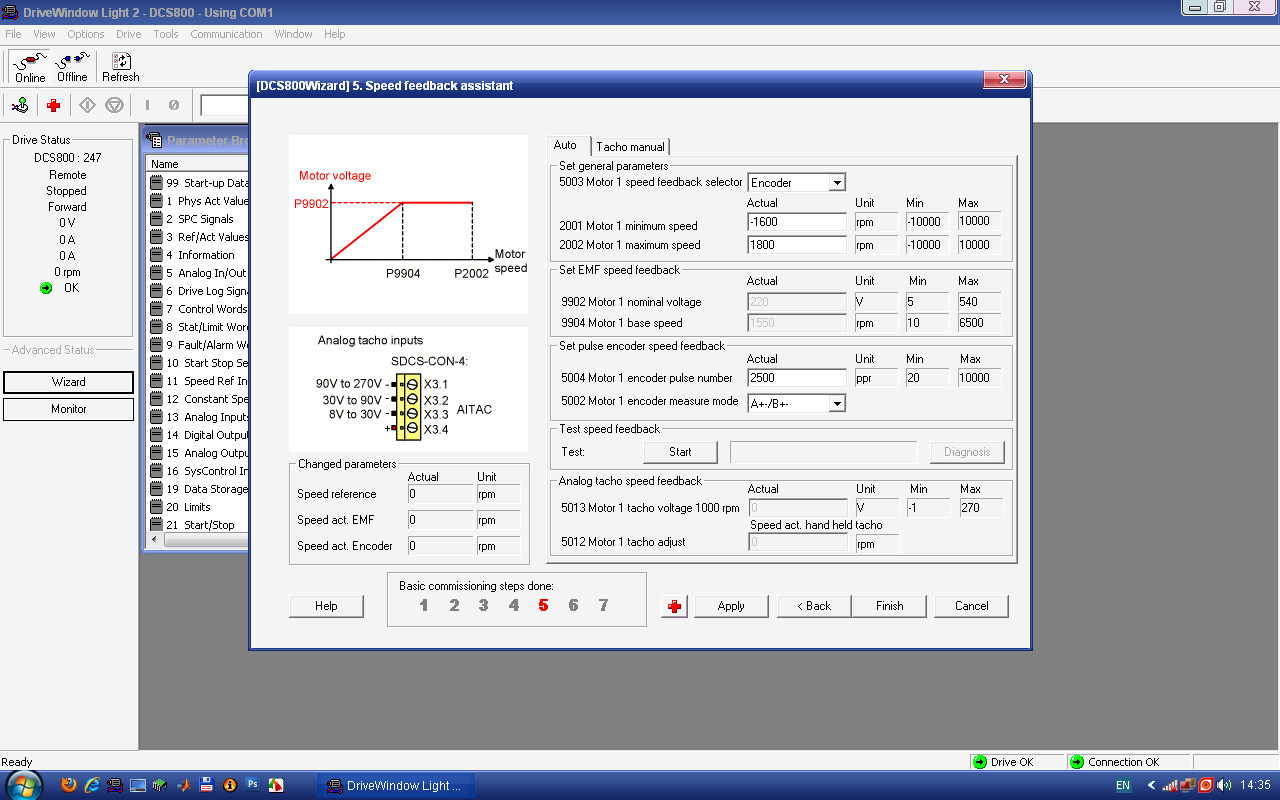
Рисунок 3.11 ― Процедура настроювання зворотного зв’язку за швидкістю з енкодером
3.3.8.3 Після налаштування зворотного зв’язку за швидкістю необхідно провести процедуру налаштування регулятора швидкості (рис. 3.12). Настроювання регулятора швидкості нічим не відрізняється від подібної процедури, описаної в пункті 3.3.1.3.8. Записати параметри регулятора швидкості (параметри 2403 та 2409).
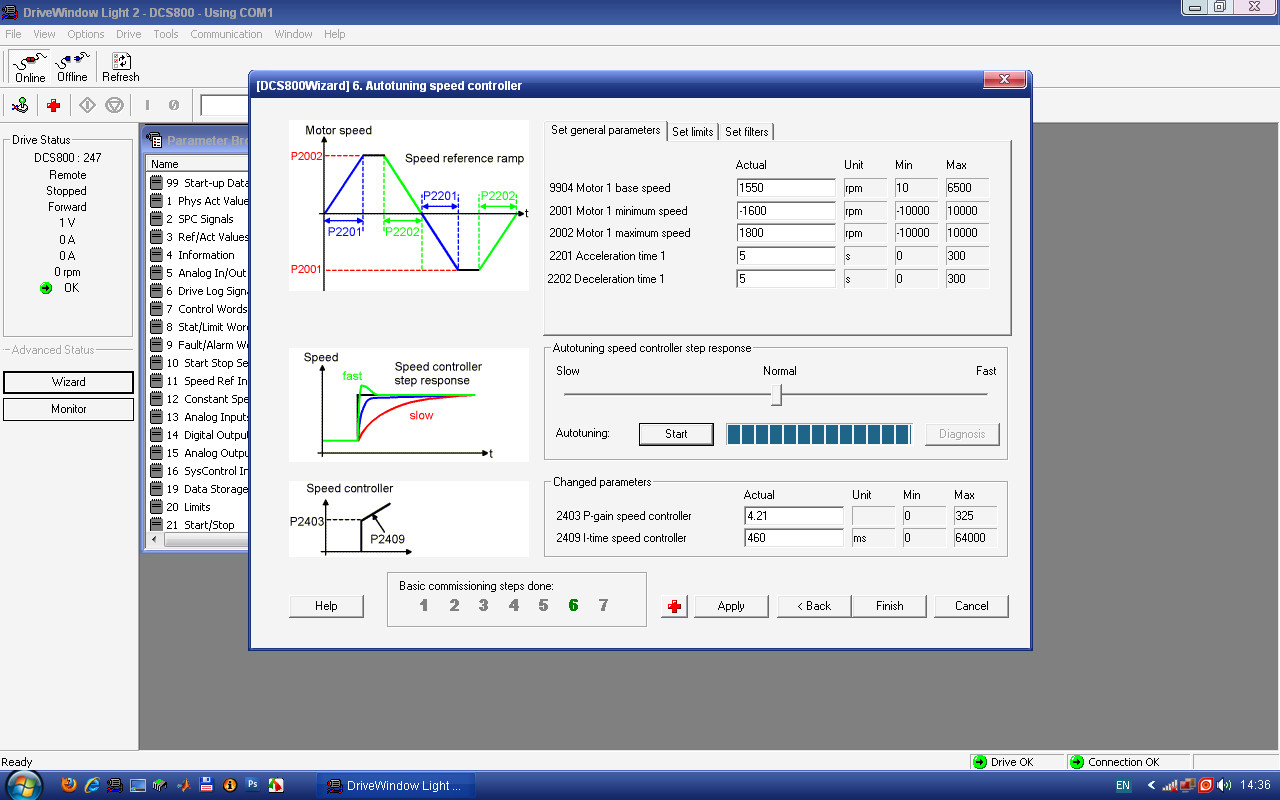
Рисунок 3.12 – Вікно процедури налаштування регулятора швидкості
3.3.9 Для виконання пункту 3.2.6 програми з пі-регулятором
3.3.9.1 Зняти механічні характеристики за методикою, аналогічною, як і для системи з ПІ- регулятором зі зворотним зв’язком за швидкістю на основі ЕРС (пункт 3.3.2), згідно варіантів таблиці 1.