

Министерство сельского хозяйства и продовольствия
Российской Федерации
Департамент кадровой политики и образования
Волгоградская государственная сельскохозяйственная академия
Кафедра «Электрический привод и электрические машины»
Механические и электромеханические характеристики
двигателя постоянного тока независимого возбуждения
в двигательном и тормозном режимах
Волгоград 2008
СПИСОК АББРЕВИАТУР
Основные сокращения
АД - асинхронный двигатель
ДР - двигательный режим
ДПТ НВ - двигатель постоянного тока независимого возбуждения
ДТ - динамическое торможение
ЕХ - естественная характеристика ДПТ
ИД - испытуемый двигатель
ЛР - лабораторная работа
РТ - рекуперативное торможение
ТПВ - торможение противовключением
XX - холостой ход
ЧВ - частота вращения
ЧВ ИХХ - частота вращения идеального холостого хода
ЭД - электрический двигатель
ЗГТ - электрический привод
Основные обозначения
I - ток в якорной цепи ДПТ
1н - номинальный ток в якорной цепи ДПТ
с - коэффициент ДПТ НВ
к - конструктивный коэффициент ДПТ
М - вращающий момент ДПТ
Мн - номинальный вращающий момент ДПТ
n - скорость вращения ДПТ, об/мин
nн - номинальная скорость вращения ДПТ
Рн - номинальная мощность ДПТ
R - полное (суммарное) сопротивление якорной цепи ДПТ
Rh - номинальное сопротивление
Rя - внутреннее сопротивление якоря ДПТ
U - напряжение источника питания
Uh - номинальное напряжение источника питания
Ф - магнитный поток ДПТ
Фн - номинальный магнитный поток ДПТ
ω - ЧВ якоря ДПТ, рад/с
ωн - номинальная ЧВ якоря ДПТ
ωо - ЧВ ИХХ ДПТ
Лабораторная работа № 1
Механические и электромеханические характеристики
двигателя постоянного тока независимого возбуждения
в двигательном и тормозном режимах
Цель работы - снятие электромеханических характеристик и последующий расчет механических характеристик ДПТ НВ в двигательном и тормозном режимах.
Предмет изучения (исследования): ДПТ НВ типа П-22.
Основные технические данные П-22: Рн=1кВт; Uh =220B; IH = 5,9 А; nн = 1500 об/мин; Rя = 4,17 Ом; Rш = 712 Ом.
Более полные данные П-22 приведены в [4].
Задание для домашней подготовки
Ознакомиться с содержанием методических указаний.
Изучить основные теоретические положения.
Ответить на контрольные вопросы раздела.
Рассчитать и построить ЕХ М = f(ω) ДПТ НВ в двигательном и тормозном режимах по двум характерным точкам.
Подготовить бланк отчета.
Программа работы
Ознакомиться со стендом лабораторной установки. Записать паспортные данные ИД.
Провести подготовку лабораторной установки.
Снять и построить ЕХ ИД ω = f(Iя) в режимах рекуперативного торможения и двигательном (при U = Uh = const, Iв = Iвн =const, Rя = 0).
Снять и построить РХ ИД ω = f(Iя) в режимах рекуперативного торможения, двигательном и противовключения при U = Uh - const, Iв = Iвн =const, Rя = 0,5 RH.
Снять и построить ЕХ, РХ ИД ω = f(Iя) в режиме динамического торможения при Iв = Iвн = const, Rя = 0; 0,5 Rh
Пересчитать ω = f(Iя) на ω = f(M) по (16) с учетом (12).
Построить ω = f(M) в двигательном и тормозных режимах.
Основные теоретические положения
Электромеханическая (скоростная) характеристика ЭД выражается зависимостью:
ω = f(I).
Механическая характеристика ЭД представляет зависимость
ω = f(M).
Терминология вышеназванных понятий представлена в рекомендуемой литературе [1, с. 125, 239, 300].
ЭД может работать как в двигательном, так и в тормозных режимах. Различают три способа электрического торможения ЭД: рекуперативное [1, с.223], динамическое [1, с. 54]; противовключением [1, с. 260].
Уравнения ω = f(I) и ω = f(M) ДПТ НВ в двигательном режиме имеют вид:
![]() (1)
(1)
![]() (2)
(2)
В режимах торможения
рекуперативного:
![]() (3)
(3)
![]() (4)
(4)
динамического:
![]() (5)
(5)
![]() (6)
(6)
противовключением:
![]() (7)
(7)
![]() (8)
(8)
Уравнения (1) - (8) представляют собой уравнения прямой линии, в которых значение UH/c определяет ωо - ЧВ ИХХ ЭП [1, с. 240]:
![]() (9)
(9)
С учетом (9) уравнения (1) - (8) могут быть записаны в следующей форме, например, для «двигательного режима»
ω = ω –Δω, (10)
где Δω — перепад скорости относительного ЧВ ИХХ,
![]()
Уравнения (1) - (8) позволяют сделать вывод, что ω = f(I) и М = f(ω) зависят от U, R и Ф.
При условии, что U = UH, Ф = Фн и R = Rя, ω = f(I) и М = f(ω) называются естественными характеристиками (ЕХ) [2, с. 51-52].
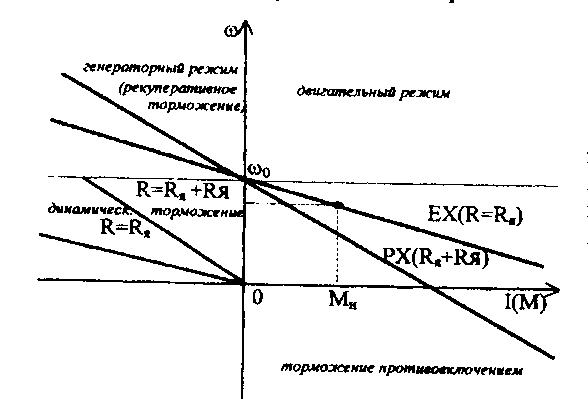
При U ≠ UH или Ф ≠Фн или R > Rя, ω = f(I) и М = f(ω) называются искусственными характеристиками (ИХ) [2, с.51-52]. ИХ при R>Rя и U = UH, Ф = Фн носит название реостатной характеристики (РХ). На рис. 1 показаны электромеханическая и механическая ЕХ и РХ ДПТ, причем, поскольку с = const, то М = I и характеристики представлены совмещенным линиями [3, с. 61].
Так как уравнения механической характеристики в двигательном и тормозных режимах представляют собой прямые линии, то для расчета и построения ЕХ и ИХ достаточно определить координаты двух точек. Таковыми могут быть характерные точки ДПТ, которые определяются по каталожным данным ЭД: номинального момента и ЧВ ИХХ.
Точка ЧВ ИХХ имеет координаты: ω = ωо, М = 0 (см. рис. 1.)
![]()
![]()
где:
![]() (12)
(12)
![]() (13)
(13)
Краткое описание лабораторного стенда
Механические характеристики ИД в двигательном и тормозных режимах снимаются наиболее современным и точным методом - через зависимость частоты вращения ДПТ от тока его якоря ω= f(Iя), так как М = IЯ [2, с. 49-50].
Причем в качестве нагрузочного устройства ИД используется машина постоянного тока (МПТ), включенная по схеме генератор - двигатель (Г-Д).
Принципиальная электрическая схема лабораторной установки приведена на рис. 2.
В схеме на рис. 2 ИД Ml механически связан с нагрузочной машиной МПТ М2 типа П-22.
МПТ М2, имеющая независимое возбуждение, включается по схеме Г-Д с МПТ МЗ. МПТ МЗ приводится во вращение практически с постоянной частотой вращения АД М4.
Напряжение сети постоянного тока контролируется сигнальной лампой HL1 и вольтметром PV1. Второй вольтметр PV2 предназначен для контроля величины и полярности ЭДС МПТ М2 и МЗ.
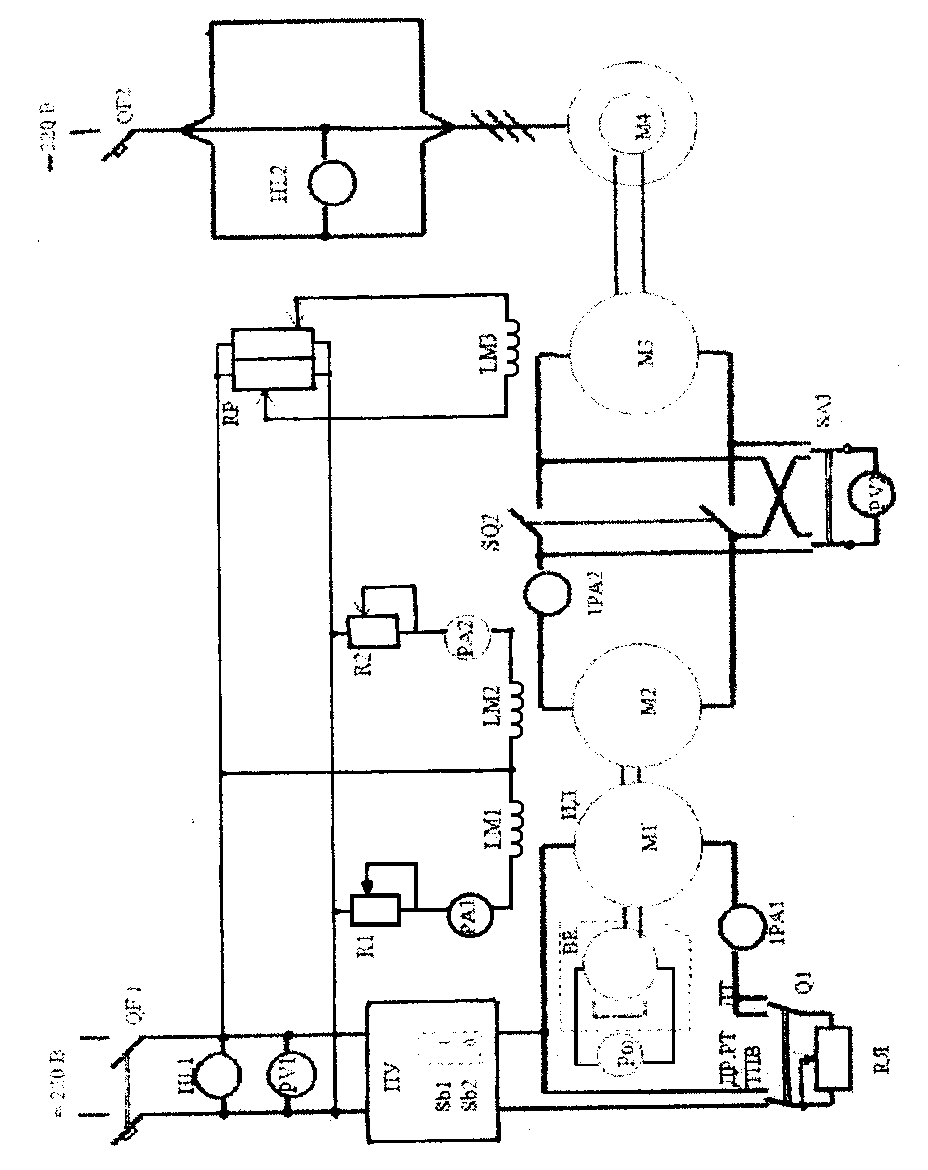
Рис. 2. Принципиальная электросхема лабораторной установки
Для измерения тока в цепи якоря и возбуждения МПТ Ml и М2 установлены амперметры 1РА1-1РА2 и РА1-РА2. Измерение частоты вращения ИД Ml осуществляется прибором Рω. Прибор Рω питается от тахогенератора BR механически связанного с валом ИД Ml. Потенциометр RP предназначен для регулирования ЭДС МПТ МЗ, а резистор Rя для увеличения сопротивления якорной цепи ИД Ml.
Устройство ПУ (тип ПП1 125, UH = 220 В, IН = 25 А) предназначено для пуска и остановки ИД Ml, сигнальная лампа HL2 для контроля включения АД.