

Параметры механических лопат и технология разработки в забое
Основными технологическими параметрами механических лопат (рис.2) являются:
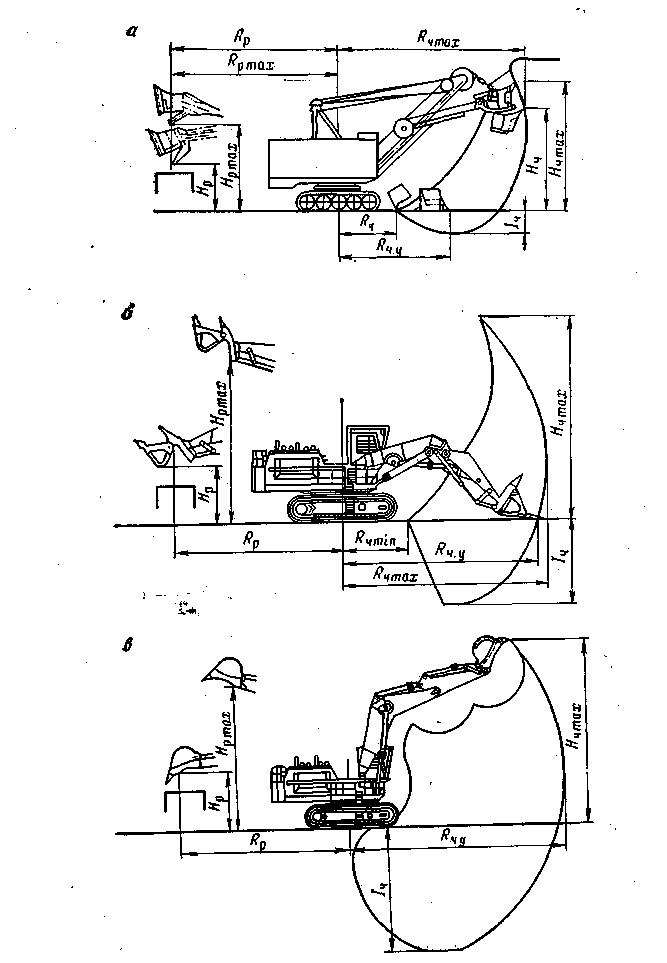
Рисунок 2 – Схемы и технологические параметры экскаваторов механических лопат:
а — канатного экскаватора; б — гидравлического экскаватора;
в — гидравлического экскаватора, оборудованного обратной лопатой
радиус черпания Rч — горизонтальное расстояние от оси вращения экскаватора до режущей кромки ковша;
максимальный радиус черпания Rч max — соответствует максимально выдвинутой рукояти;
минимальный радиус черпания Rч min — соответствует подтянутой к гусеницам рукояти на горизонте установки экскаватора;
радиус черпания на горизонте установки экскаватора Rч. у — максимальный радиус черпания на уровне установки экскаватора;
высота черпания Нч — вертикальное расстояние от горизонта установки экскаватора до режущей кромки ковша;
высота черпания максимальная Нч max — соответствует максимально поднятой рукояти;
глубина черпания Iч — расстояние от горизонтали установки экскаватора до режущей кромки зубьев ковша при нижнем черпании;
радиус разгрузки RР — горизонтальное расстояние от оси вращения экскаватора до середины ковша в момент разгрузки;
Rp max — максимальный радиус разгрузки;
высота разгрузки Hр — вертикальное расстояние от горизонта установки экскаватора до нижней кромки откинутого днища ковша;
максимальная высота разгрузки Нp max — соответствует максимально поднятому ковшу.
Для канатных механических лопат радиусы и высоты черпания и разгрузки изменяются с изменением угла наклона стрелы, которая, как правило, устанавливается под углом 45°. Габариты определяются по максимально выступающим частям экскаватора.
Рабочие параметры экскаватора определяют параметры забоя и технологическую схему его работы. При установлении ширины забоя механической лопаты определяющим является радиус черпания на уровне стояния. Максимальная производительность экскаватора достигается при минимуме передвижек в забое и возможно меньшем среднем угле поворота экскаватора от места черпания к пункту разгрузки.
Ширина торцевого забоя обеспечивается при 1,5Rч. у (рис.3, а).
Ширина заходки экскаватора в породах, разрабатываемых без предварительного рыхления, соответствует ширине забоя.
В крепких породах с буровзрывным рыхлением ширина заходки В по целику определяется параметрами буровзрывных работ (рис.3, б).
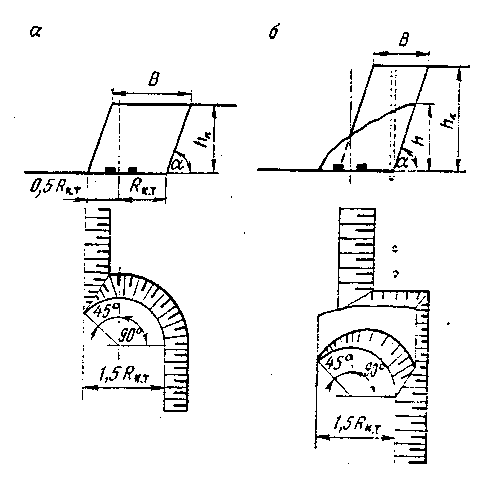
Рисунок 3 – Схемы и параметры забоев механической лопаты
При разработке горных пород вскрышными мехлопатами с перевалкой в выработанное пространство (рис.4) ширина заходки определяется емкостью внутренних отвалов, максимальная ширина заходки составляет 1,75Rч.у. При небольшой емкости внутренних отвалов ширина заходки может быть уменьшена:
![]() (1)
(1)
где сх – ширина хода экскаватора, м
Минимальная ширина тупиковой заходки при проведении траншеи без учета транспортного обслуживания определяется радиусом вращения кабины Rк и расстоянием безопасности до откоса с:
![]() .
(2)
.
(2)
Она может быть обеспечена при применении экскаваторов с удлиненным рабочим оборудованием с верхней погрузкой в средства транспорта или расположением отвалов на бортах траншеи.
Максимальная ширина заходки
![]() .
(3)
.
(3)
При погрузке горной массы в средства транспорта на уровне стояния экскаватора ширина тупиковой заходки определяется с учетом размещения транспортных коммуникаций 'и схемы подачи транспортных средств под погрузку. Высота забоя ограничивается высотой черпания экскаватора. Минимальная высота забоя механической лопаты принимается из условия наполнения ковша за одно черпание.
Высота уступа в массиве, разрабатываемом без буровзрывного дробления, соответствует высоте забоя. В крепких породах высота уступа допускается равной 1,5 Нч max при условии, что высота развала будет равна максимальной высоте черпания экскаватора.
Минимальная ширина тупиковой заходки при проведении траншеи без учета транспортного обслуживания определяется радиусом вращения кабины Rк и расстоянием безопасности до откоса с:
. (4)
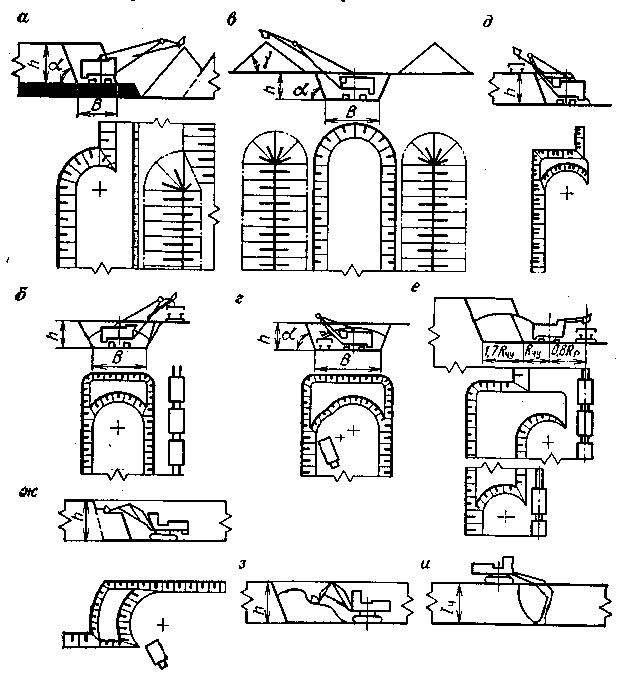
Рисунок 4 – Технологические схемы работы механической лопаты:
а — с перевалкой вскрыши в выработанное пространство; б — проведение траншей с верхней погрузкой в средства транспорта; в — проведение траншей с расположением отвалов на их бортах; г — проведение траншей с расположением отвалов на их бортах; г — проведение траншей с погрузкой в средства транспорта на уровне стояния экскаватора; и — разработка торцевого забоя с верхней погрузкой в средства транспорта; е — разработка торцевого забоя с погрузкой в средства транспорта на уровне стояния экскаватора; ж — разработка торцевого забоя в породах гидравлическим экскаватором; з — разработка торцевого забоя в скальных породах гидравлическим экскаватором; и — разработка торцевого забоя гидравлическим экскаватором с нижним черпанием
Минимальная ширина тупиковой заходки при проведении траншеи без учета транспортного обслуживания определяется радиусом вращения кабины Rк и расстоянием безопасности до откоса с:
. (5)
Она может быть обеспечена при применении экскаваторов с удлиненным рабочим оборудованием с верхней погрузкой в средства транспорта или расположением отвалов на бортах траншеи.
Максимальная ширина заходки
. (6)
При погрузке горной массы в средства транспорта на уровне стояния экскаватора ширина тупиковой заходки определяется с учетом размещения транспортных коммуникаций 'и схемы подачи транспортных средств под погрузку. Высота забоя ограничивается высотой черпания экскаватора. Минимальная высота забоя механической лопаты принимается из условия наполнения ковша за одно черпание.
Высота уступа в массиве, разрабатываемом без буровзрывного дробления, соответствует высоте забоя. В крепких породах высота уступа допускается равной 1,5 Нч max при условии, что высота развала будет равна максимальной высоте черпания экскаватора.
Большая высота уступа в массиве допускается при разработке горизонтальных пластов полезного ископаемого по разрешению Госгортехнадзора.
Высота уступа h (м) при верхней разгрузке механической лопатой с удлиненным рабочим оборудованием устанавливается из условия высоты транспортного сосуда hт и необходимого зазора с между ним и ковшом:
![]() .
(7)
.
(7)
Угол откоса поверхности забоя зависит от свойств разрабатываемого массива и составляет, как правило, 70—80°.
При разработке забоя с погрузкой горной массы в средства железнодорожного транспорта ось пути располагают на расстоянии 0,8 Rp max от оси экскаватора.
При разработке трудновзрываемых горных пород, когда развал горной массы имеет большую ширину, его убирают в несколько заходок с передвижкой путей. В этом случае для уменьшения времени простоев экскаватора из-за передвижки пути возможно увеличение ширины заходки до 1,7Rч.у. При автомобильном транспорте автосамосвалы могут располагаться сбоку (рис.5, а и б) или позади (рис.5, в и г) экскаватора в зоне разгрузки ковша с минимальным углом разворота от места черпания, по условию безопасности ковш не должен перемещаться над кабиной водителя. При конвейерном транспорте горная масса загружается экскаватором в бункер-питатель, который располагается сбоку экскаватора или внутри заходки позади экскаватора.
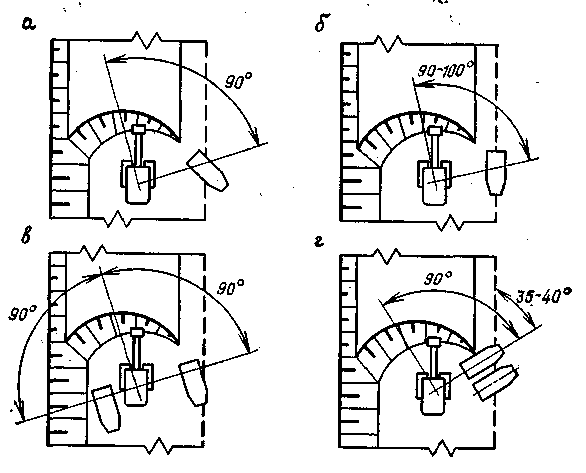
Рисунок 5 - Схемы установки автосамосвала в забое механической лопаты
Литература: 1 осн. 104-114; 2 осн. 94-114; 3 осн. 151-190
Контрольные вопросы:
1. Опишите область применения, достоинства и недостатки механических лопат;
2. Перечислите рабочие параметры механических лопат;
3. Опишите виды забоев механических лопат и последовательность выемки породы.
Лекция 5. Технология выемки и погрузки одноковшовыми экскаваторами
Разработка горных пород драглайнами
Драглайн является экскаватором цикличного действия, следовательно, производительность его на тонну конструкции меньше, чем у экскаваторов непрерывного действия, однако область его применения гораздо шире. Продолжительность сезона его работы намного превышает продолжительность сезона работы машин непрерывного действия и во многих климатических зонах страны эффективна круглогодичная работа его.
Драглайном можно разрабатывать полускальные породы с предварительным буровзрывным рыхлением, производить экскавацию в обводненных горизонтах и при сложной гипсометрии пластов.
Благодаря этим преимуществам разработка горных пород драглайнами у нас в стране в соответствующих условиях нашла широкое распространение.
Рабочим органом драглайна является стрела с подвешенным на канатах ковшом. Стрелы отечественных экскаваторов имеют легкую вантовую конструкцию, американских экскаваторов фирмы «Дрессер-Марион» — вид металлической фермы.
Принцип экскавации заключается в срезании стружки ковшом во время перемещения его по поверхности забоя под действием тягового каната. Ковш заглубляется и производит резание породы под действием собственного веса. В плотных породах при затрудненном внедрении задняя часть ковша немного приподнимается подъемным канатом, образуя большой угол между поверхностью забоя и зубьями ковша, что облегчает его заглубление. Рабочий цикл включает поворот и одновременное опускание ковша в забой, затем наполнение ковша, подъем его из забоя с одновременным поворотом на разгрузку.
В горизонтальном положении наполненный ковш удерживается тяговым канатом. Во время работы экскаватор опирается на круглую поворотную платформу большой площади, благодаря чему независимо от массы экскаватор имеет малое удельное давление на грунт—от 0,4105 до 2,3105 Па, что позволяет ему успешно работать на насыпных породах в отвалах.
Для перемещения все отечественные экскаваторы имеют шагающий или шагающе-рельсовый ход.
В РФ ПО «Уралмаш» и Ново-Краматорским заводом выпускается ряд экскаваторов с ковшами емкостью от 4 до 100 м3 и стрелой длиной 40—125 м. Фирма «Дрессер-Марион» выпускает экскаваторы на шагающем и гусеничном ходу с ковшом емкостью от 10 до 138 м3 и стрелой длиной от 55 до 122 м.