

3.2. Задание:
Изучение структуры двухпозиционного регулятора температуры электропечи сопротивления (ЭПС), методов построения математических моделей регуляторов данного класса, приобретение навыков исследования релейных систем с помощью прикладного пакета SIMULINK.
Функциональная схема системы двухпозиционного регулирования температуры ЭПС
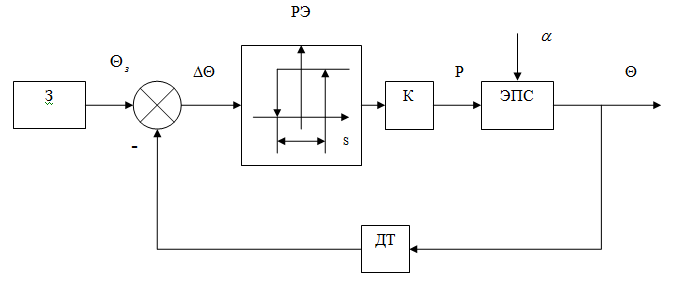
Элементы функциональной схемы: З – задатчик температуры; РЭ – релейный элемент (S – ширина петли гистерезиса РЭ); К – контактор; ДТ – датчик температуры.
Сигналы,
действующие в системе:
![]() - заданная температура,
;
- температура печи,
;
- заданная температура,
;
- температура печи,
;
![]() - рассогласование (ошибка) системы,
;
P
– мощность, вводимая в печь, Вт;
- рассогласование (ошибка) системы,
;
P
– мощность, вводимая в печь, Вт;
- изменение теплоотдачи, .
Структурная схема системы двухпозиционного регулирования температуры ЭПС

3.2.1. Набрать блок-схему модели исследуемой системы в среде SIMULINK. Датчик температуры представить безынерционным звеном.
Моделирование
будем проводить в относительных единицах
измерения мощности, температуры и
времени. За базовое значение мощности
принимается номинальная мощность
![]() ,
за базовое время – постоянная времени
печи
,
за базовое время – постоянная времени
печи
![]() .
Коэффициент передачи печи
.
Коэффициент передачи печи
![]() принимаем равным 1.
принимаем равным 1.
Тогда
![]()
![]()
Также принимаем
![]()
Положим
коэффициент передачи датчика температуры
![]() .
.
Структурная схема исследуемой системы в SIMULINK

3.2.2.
Провести исследование переходных
процессов изменения мощности
![]() и температуры печи
и температуры печи
![]() при отработке ступенчатого изменения
задающего
при отработке ступенчатого изменения
задающего
![]() и возмущающего
воздействий. Ширину петли гистерезиса
задать равной 0.1.
и возмущающего
воздействий. Ширину петли гистерезиса
задать равной 0.1.
Для построения временных зависимостей используем метод интегрирования ode45 (одношаговые явные методы Рунге – Кутты 4-го и 5-го порядка) с переменным шагом (Variable-step).

Временные
зависимости задания температуры,
мощности, вводимой в печь и температуры
печи при
![]()

Временные
зависимости задания температуры,
мощности, вводимой в печь и температуры
печи при
(![]() )
и
)
и
![]() (
(![]() )
)
Постройте
временные зависимости задания температуры,
мощности, вводимой в печь и температуры
печи при
(
)
и
![]() (
).
(
).
Постройте
временные зависимости задания температуры,
мощности, вводимой в печь и температуры
печи при
(
)
и
![]() (
).
(
).
3.2.3.
Заменить безынерционный датчик
температуры инерционным звеном с
постоянной времени
![]() .
Повторить п. 3.2.2 для случая учета
инерционности датчика температуры.
.
Повторить п. 3.2.2 для случая учета
инерционности датчика температуры.
Положим
![]()
Структурная схема исследуемой системы в SIMULINK


Временные зависимости задания температуры, мощности, вводимой в печь, сигнала обратной связи (сигнала на выходе ДТ) и температуры печи при (с инерционным ДТ), а также температуры печи при безынерционном ДТ

Временные зависимости задания температуры, мощности, вводимой в печь, сигнала обратной связи (сигнала на выходе ДТ) и температуры печи (с инерционным ДТ), а также температуры печи при безынерционном ДТ при ( ) и ( )
Постройте временные зависимости задания температуры, мощности, вводимой в печь, сигнала обратной связи (сигнала на выходе ДТ) и температуры печи (с инерционным ДТ), а также температуры печи при безынерционном ДТ при ( ) и ( ).