

Графопостроитель ху Graph
Назначение:
Строит график одного сигнала в функции другого (график вида Y(X)).
Параметры:
x-min – Минимальное значение сигнала по оси X.
x-max – Максимальное значение сигнала по оси X
y-min – Минимальное значение сигнала по оси Y.
y-max – Максимальное значение сигнала по оси Y
Sample time – шаг модельного времени.
Блок имеет два входа. Верхний вход предназначен для подачи сигнала, который является аргументом (X), нижний – для подачи значений функции (Y).
На рис. 5.2, в качестве примера использования графопостроителя, показано построение фазовой траектории колебательного звена.
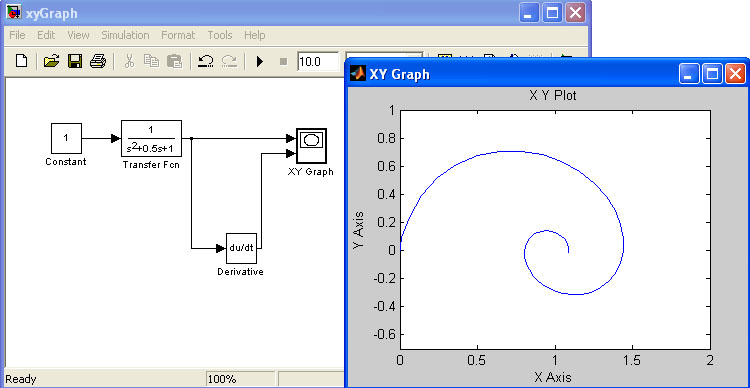
Рис. 5.2
Constant – из Commonly Used Blocks
Чтобы установить необходимые параметры блока необходимо дважды щелкнуть на блоке, в параметрах задать значение константы =1.
Transfer Fcn – Continuous. Представляет собой отношение степенных полиномов. В параметрах для нашего случая необходимо задать числитель: Numerator – [1], и знаменатель: Denominator – [1 0.5 1].
Derivative - Continuous. Блок вычисляет значение производной.
XY Graph – Sinks. Вывод результата на график в виде зависимости X от Y.
Блок алгебраического контура Algebraic Constraint
Назначение:
Выполняет поиск корней алгебраических уравнений.
Параметры:
Initial guess – Начальное значение выходного сигнала.
Блок находит такое значение выходного сигнала, при котором значение входного сигнала становится равным нулю. При этом входной сигнал должен быть прямо или опосредованно связан с входным сигналом.
На рис. 5.3 показан пример решения системы нелинейных уравнений вида:

Поскольку данная система уравнений имеет два решения, то начальные значения блоков Algebraic Constraint заданы в виде векторов. Для первого (верхнего) блока начальное значение задано вектором [1 -1], а для второго (нижнего) блока – вектором [-1 1].
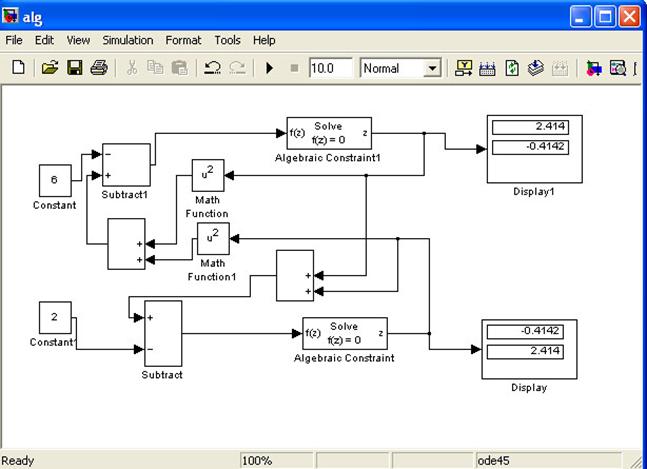
Рис. 5.3
Рассмотрим блоки, которые не использовались в предыдущем примере.
Subtract – Math Operations. В параметрах в окошке List of Signs надо поставить те операции, которые необходимы( - +).
Math Function - Math Operations. В параметрах в окошке Function надо выбрать square( чтобы был квадрат значения).
Algebraic Constant - Math Operations. В параметрах в окошке Initial guess задать начальное значение вектором [1 -1] или [-1 1].
Display – Sinks. Выводит результат.
Разработка структурной модели и ее исследование.
Задание:
Спроектировать систему регулирования температуры электрической печи сопротивления со следующими параметрами:
постоянная
времени печи
![]() с;
с;
температура
печи
![]()
![]() ;
;
точность
регулирования
![]() .
.
3.1.1. Составить функциональную схему системы регулирования температуры.
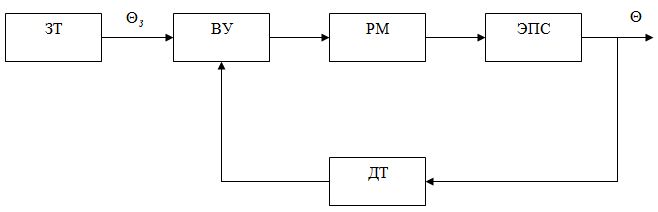
ЗТ – задатчик температуры;
ВУ – вычислительное устройство;
РМ – регулятор мощности;
ЭПС – электрическая печь сопротивления (ОУ – объект управления);
ДТ – датчик температуры (ДОС – датчик обратной связи)
3.1.2.
Определить передаточную функцию печи
сопротивления и требуемую мощность
регулятора мощности, приняв коэффициент
передачи печи
![]() .
.
Рассмотрим воздействия, действующие на идентифицируемый объект (ЭПС):

![]() -
входная величина (мощность, поступающая
в печь), Вт
-
входная величина (мощность, поступающая
в печь), Вт
![]() -
выходная величина (температура печи),
-
выходная величина (температура печи),
![]() -
возмущающее воздействие (изменение
теплоотдачи),
-
возмущающее воздействие (изменение
теплоотдачи),
![]()
Можно записать
![]() ,
где
(*)
,
где
(*)
![]() -
мощность, идущая на нагрев;
-
мощность, идущая на нагрев;
![]() -
мощность тепловых потерь;
-
мощность тепловых потерь;
- мощность, поступающая в печь и покрывающая две первые составляющие
Совершим преобразование Лапласа над левой и правой частями дифференциального уравнения (*):
![]()
В
пренебрежении температурными зависимостями
![]() и
получим:
и
получим:
![]()
![]()
![]()

![]() -
постоянная времени печи;
-
постоянная времени печи;
![]() -
коэффициент передачи печи
-
коэффициент передачи печи
Тогда
![]()
Передаточная функция печи сопротивления
![]()
Требуемую
мощность регулятора мощности определим
из установившегося режима, когда
![]() .
Поскольку коэффициент передачи печи
.
Поскольку коэффициент передачи печи
![]() ,
поэтому требуемая мощность регулятора
мощности, в нашем случае, численно равна
температуре печи:
,
поэтому требуемая мощность регулятора
мощности, в нашем случае, численно равна
температуре печи:
![]() Вт.
Вт.
3.1.3. Выбрать элементы системы регулирования температуры и определить их передаточные функции.
а. Регулятор мощности
В качестве регулятора мощности будем использовать тиристорный регулятор напряжения (мощности). Поскольку в нашем случае речь идет об использовании тиристорного регулятора напряжения для инерционного объекта (ЭПС), то можно пренебречь инерционностью регулятора и считать его безынерционным звеном.
Максимальную
мощность регулятора мощности определим
из условия её двукратного превышения
над требуемой, т.е. из условия
![]() ,
где
,
где
![]() - коэффициент передачи регулятора
мощности.
- коэффициент передачи регулятора
мощности.
Тогда передаточная функция регулятора мощности
![]()
А сам регулятор мощности представляем в виде:

Максимальная
мощность регулятора мощности
![]() Вт.
Вт.
б. Датчик температуры.
В качестве датчика температуры будем использовать хромель-алюмелевую термопару типа ТХА-VIII со следующими техническими характеристиками:
Пределы
измерения: 0![]() 1000
1000
Термо-эдс: 0 41.32 мВ
Тепловая
постоянная времени
![]() с
с
Примем
коэффициент передачи датчика температуры
![]() ,
тогда передаточная функция датчика
температуры (термопары):
,
тогда передаточная функция датчика
температуры (термопары):
![]()
3.1.4. Составить структурную схему системы регулирования температуры с П-регулятором.

3.1.5.
По заданному значению точности
![]() определить требуемый коэффициент
усиления системы регулирования.
определить требуемый коэффициент
усиления системы регулирования.
![]()
Ошибка по управляющему воздействию
![]()
![]()

![]()
 ,
где
,
где
![]() -
суммарный коэффициент усиления системы
регулирования
-
суммарный коэффициент усиления системы
регулирования
По условию температура печи
![]()
По заданному значению точности определим величину статической ошибки регулирования по управляющему воздействию:
![]()
Тогда требуемое значение суммарного коэффициента усиления системы регулирования
![]()
Отсюда коэффициент передачи П-регулятора
![]()
Проверим это с использованием средств SIMULINK:
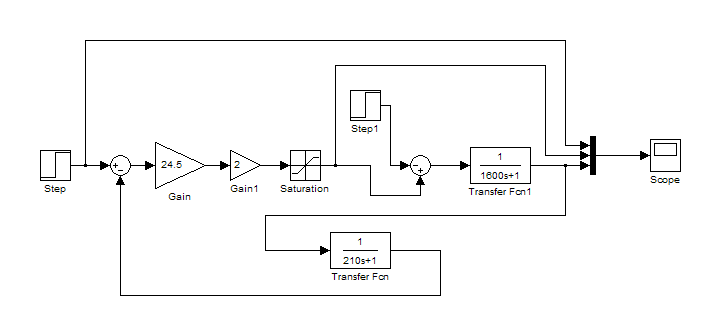
При
и
![]() получить в Simulink
изменение температуры на выходе печи
во времени
получить в Simulink
изменение температуры на выходе печи
во времени
![]() .
.
Убедиться,
что статическая ошибка регулирования
по управляющему воздействию
![]() .
.
Ошибка по возмущающему воздействию
![]()
![]()
![]()

![]()

![]()
Пусть
величина статической ошибки регулирования
по возмущающему воздействию
![]() .
.
Пусть
величина возмущающего воздействия
![]() Вт.
Вт.
Тогда требуемое значение суммарного коэффициента усиления системы регулирования
![]()
Отсюда коэффициент передачи П-регулятора
Проверить это с использованием средств SIMULINK.
При
![]() и
Вт получить изменение температуры на
выходе печи во времени
.
и
Вт получить изменение температуры на
выходе печи во времени
.
Убедиться,
что статическая ошибка регулирования
по возмущающему воздействию
![]() .
.
При одновременном действии управляющего и возмущающего воздействий ( , Вт) величина статической ошибки регулирования
![]()
![]()
Проверить это с использованием средств SIMULINK.
При и Вт получить изменение температуры на выходе печи во времени .
Убедиться,
что статическая ошибка регулирования
![]() .
.
3.1.6. Рассчитать и построить зависимость статической ошибки регулирования от возмущающего воздействия, изменяющегося в диапазоне от 0 до 1 (в относительных величинах).
Зависимость статической ошибки регулирования от возмущающего воздействия
![]() ,
где
,
где
![]() ,
Вт
,
Вт
Полученную зависимость постройте в любом из известных пакетов: Excel, MathCAD или MATLAB.
3.1.7. Проверить систему на устойчивость.
Передаточная функция разомкнутой системы
![]()
Передаточная функция замкнутой системы по каналу задания




![]()
![]()
Передаточная функция замкнутой системы по каналу возмущения


![]()
![]()
Оценим устойчивость замкнутой системы регулирования, используя алгебраический критерий Гурвица:
Характеристический полином замкнутой системы
![]()
Коэффициенты характеристического полинома замкнутой системы:
![]()
![]()
![]()
Условием устойчивости системы второго порядка является положительность коэффициентов её характеристического полинома, следовательно, исследуемая замкнутая система является устойчивой.
Теперь оцените устойчивость исследуемой системы, используя частотный критерий устойчивости Найквиста:
Постройте амплитудно-фазовую характеристику (АФХ) разомкнутой системы (годограф Найквиста) в MathCAD или в MATLAB/Simulink:
![]()
![]()
Согласно критерию Найквиста, если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф разомкнутой системы не охватывал точку комплексной плоскости с координатами (-1; j0).
В нашем случае разомкнутая система устойчива, поскольку корни её характеристического полинома отрицательны, а годограф разомкнутой системы не охватывает точку с координатами (-1; j0), поэтому замкнутая система является устойчивой. Убедитесь в этом, построив годограф.
3.1.8. Рассчитать и построить переходную функцию системы регулирования с П-регулятором для задающего и возмущающего воздействий. Воздействия принимать в диапазоне от 0.5 до 1 (в относительных величинах).
Переходная функция системы регулирования с П-регулятором для задающего воздействия


![]()
![]()

Статическая
ошибка регулирования в обоих случаях
одинакова и составляет
![]() (
(![]() ),
однако вид переходных характеристик
несколько различается, что объясняется
наличием в реальной системе ограничения
по мощности регулятора напряжения,
используемого в системе регулирования
температуры печи сопротивления.
),
однако вид переходных характеристик
несколько различается, что объясняется
наличием в реальной системе ограничения
по мощности регулятора напряжения,
используемого в системе регулирования
температуры печи сопротивления.
Переходная функция системы регулирования с П-регулятором для возмущающего воздействия

С использованием средств MathCAD получить выражение для переходной функции системы регулирования с П-регулятором для возмущающего воздействия и построить ее:
![]()
Проверить это с использованием средств SIMULINK.
Построить
в SIMULINK
переходную функцию системы регулирования
с П-регулятором для задающего воздействия
![]() .
.
Построить
в SIMULINK
переходную функцию системы регулирования
с П-регулятором для возмущающего
воздействия
![]() Вт.
Вт.
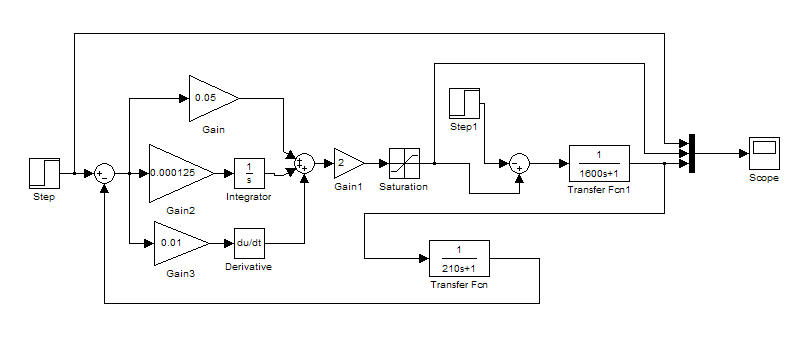
3.1.9. Провести синтез системы регулирования температуры электрической печи сопротивления, выбрав вид и параметры последовательного корректирующего звена, обеспечивающего перерегулирование не более 0.01 от установившегося значения.
Синтез
системы регулирования температуры
электрической печи сопротивления будем
проводить исходя из того, что
перерегулирование
![]() .
.
В
качестве последовательного корректирующего
звена возьмем ПИД-звено со следующими
параметрами:
![]() ,
,
![]() ,
,
![]() .
.
Пусть .
Проверим
в SIMULINK,
обеспечивает ли такое звено перерегулирование
не более 0.01 от установившегося значения
(![]() ):
):
Получим следующие временные зависимости:

В
данном случае перерегулирование
![]() .
.
3.1.10. Для рассчитанных параметров корректирующего звена построить переходные функции при изменении задающего и возмущающего воздействий отдельно для каждой составляющей закона регулирования и при использовании всех выбранных составляющих закона регулирования.
3.1.11. Выводы.
Исходная
система регулирования температуры
электрической печи сопротивления
является статической системой (системой
автоматического управления с астатизмом
0-го порядка), поэтому отработка системой
постоянных входных сигналов осуществляется
с конечной статической ошибкой. При
этом величина суммарной статической
ошибки системы складывается из ошибки
по управляющему воздействию и ошибки
по возмущающему воздействию. Каждая из
этих составляющих, в свою очередь,
прямопропорциональна величине самого
воздействия и обратнопропорциональна
величине суммарного коэффициента
усиления системы регулирования. Таким
образом, вводя в систему регулирования
П-регулятор и увеличивая его коэффициент
передачи (![]() ),
мы добиваемся уменьшения величины
статической ошибки системы.
),
мы добиваемся уменьшения величины
статической ошибки системы.
Увеличение
коэффициента передачи П-регулятора не
ведет к потере данной системой
устойчивости, поскольку годограф
разомкнутой системы (годограф Найквиста)
не пересекает мнимую ось в её отрицательной
части, а лишь стремится с увеличением
частоты к началу координат под углом
![]() .
Уменьшение статической ошибки с
увеличением коэффициента
ограничивается лишь максимальной
мощностью регулятора напряжения,
используемого в данной системе
регулирования в качестве исполнительного
элемента.
.
Уменьшение статической ошибки с
увеличением коэффициента
ограничивается лишь максимальной
мощностью регулятора напряжения,
используемого в данной системе
регулирования в качестве исполнительного
элемента.
Эффективным способом уменьшения величины перерегулирования и времени переходного процесса является последовательная коррекция, заключающаяся во включении в прямую цепь перед регулятором мощности ПИД-звена с определенными параметрами. При этом система регулирования становится астатической с астатизмом 1-го порядка, поэтому статические ошибки системы, как по управляющему воздействию, так и по возмущающему, будут равны 0. Подбором же самих коэффициентов в законе регулирования можно добиться требуемого характера протекания процесса, а также обеспечить то или иное быстродействие системы регулирования.