3.Построение наблюдателя
Разработка наблюдателя состояния:
f
u
y

![]()


Передаточная функция объекта:
W(s)=
![]() =
=
![]()
Дифференциальное уравнение объекта:
1.0621y’’+5,9213y’+y=0.9958(u+f)
Измеряется у. Введем координаты состояния:
![]()
Тогда уравнения в пространстве состояний:
Y(t)=y(t);
у=![]()
![]()
Так как f меняется медленно, то предположим, что f=const.

А= ;
В=
;
В= ;
С=
;
С=![]()
Матрица наблюдаемости:
M=![]()
Динамическая система называется наблюдаемой, если найдется такой интервал [tн;tк], что по результатам измерения вектора Y(t) можно однозначно восстановить значения вектора координат состояния Х(t).
Ранг матрицы наблюдаемости очевидно равен трем, значит система наблюдаема.
![]()
Матрица коррекции:


![]()
Вычислим детерминант
матрицы
![]() :
:

 Для
того, чтобы переходный процесс в
наблюдателе длился tп=6с,
выберем все собственные числа
Для
того, чтобы переходный процесс в
наблюдателе длился tп=6с,
выберем все собственные числа![]() .
Уравнение, в котором полином 3-го порядка
относительно λ имеет все корни равные
-0.5, можно записать в виде:
.
Уравнение, в котором полином 3-го порядка
относительно λ имеет все корни равные
-0.5, можно записать в виде:
![]()
![]()
Приравнивая коэффициенты при одинаковых степенях λ, получаем

Отсюда:

Выбранные таким образом коэффициенты матрицы коррекции К обеспечат сходимость оценок координат состояния наблюдателя к истинным значениям примерно за 6с.
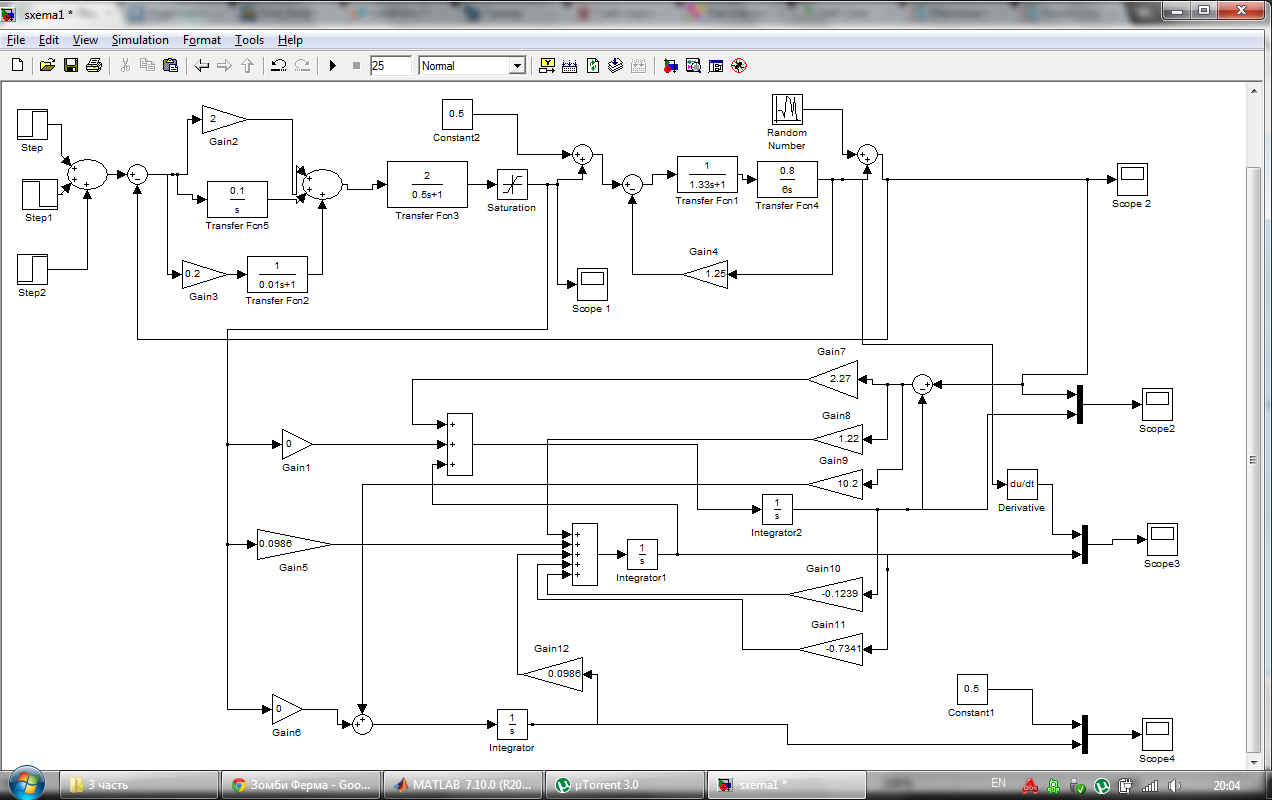
Далее предлагается рассмотреть систему с наблюдателем, построенную в MatLab и графики изменения во времени истинных значений координат состояния и результатов их наблюдения. При задании нулевых начальных условий в блоке Integrator в строке Initial Condition ввели начальные условия в соответствии с заданием.
В качестве помехи f=const=0.2 использовали блок Constant.
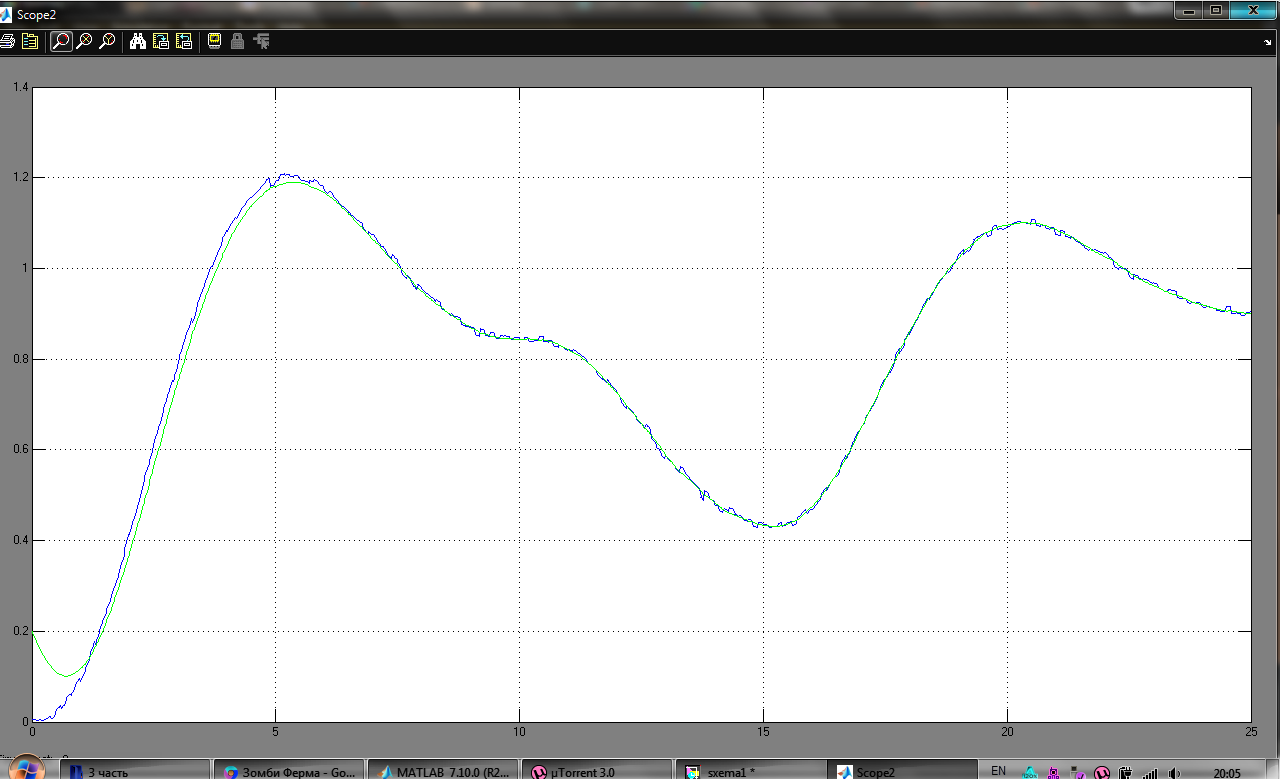
График, показывающий у при движении объекта из нулевых начальных условий и у(0) при движении наблюдателя из у(0)=-0,2
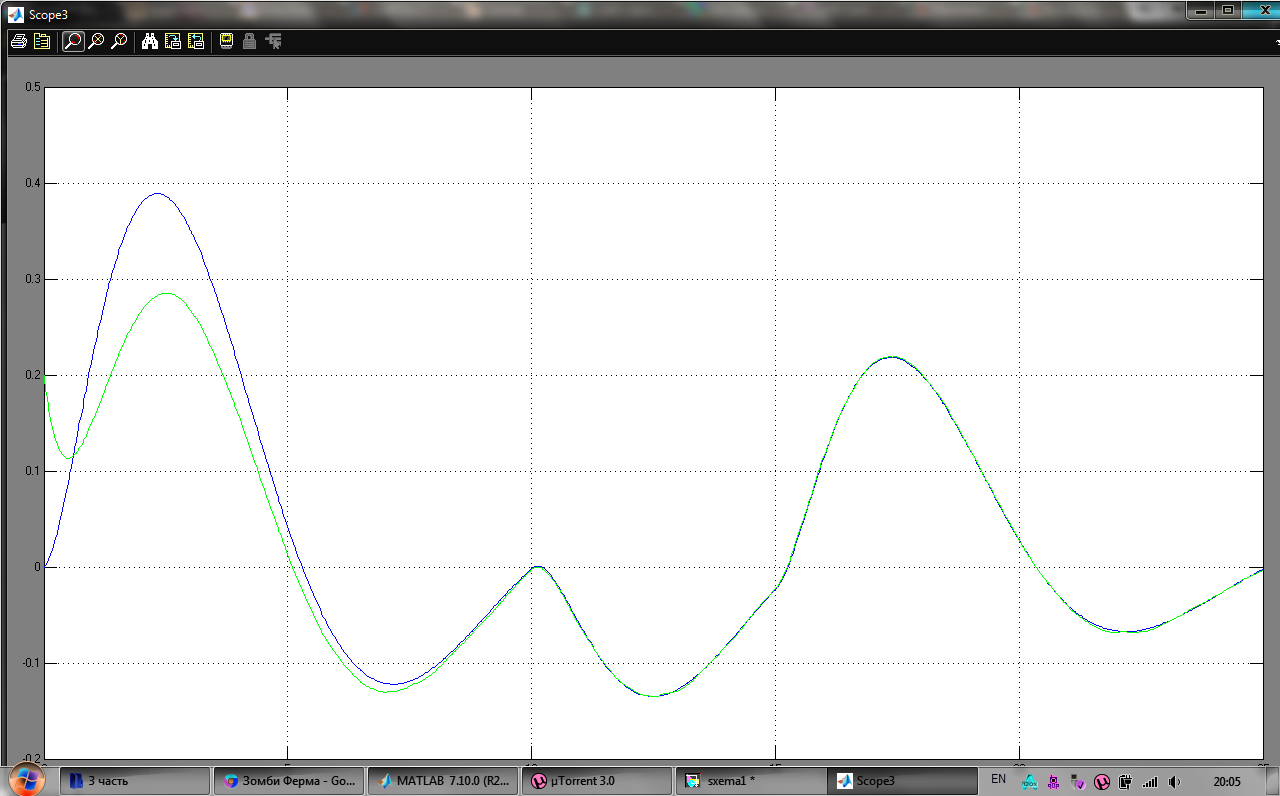
График, показывающий у´ при движении объекта из нулевых начальных условий и у´ (0) при движении наблюдателя из у´ (0)=0,1
График, показывающий
f
при движении объекта и f=const=0,2
при движении наблюдателя

Заключение
Приобрели практические навыки в моделировании на ЭВМ динамических систем управления, в идентификации объектов по данным нормальной эксплуатации в контуре управления, а также в построении и моделировании работы наблюдателя координат состояния.
Список литературы
1. Моделирование систем: метод. Указания к выполнению курсовой работы/ В.А. Кривоносов. – Старый Оскол, 2003. – 22с.