

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / часть2 / tmm_11
.doc
4.3. Решение уравнений кинетостатики
Для механизмов с идеальными связями уравнения кинетостатики представляют собой систему линейных алгебраических уравнений, обладающую единственным решением, если избыточные связи в системе отсутствуют, а рассматриваемое положение механизма не является особым. Для сложных механизмов, содержащих большое число подвижных звеньев, система уравнений кинетостатики имеет высокий порядок (для N–1 подвижных звеньев – 6ּ(N–1) уравнений). Ее решение существенно облегчается тем, что она может быть разделена на несколько независимых систем, каждая из которых содержит обобщенную движущую силу и реакции кинематических пар, действующие на звенья одной структурной группы. Действительно, для каждой структурной группы, не содержащей избыточных связей, справедлива структурная формула
 (4.23)
(4.23)
где wG – число степеней подвижности группы, NG – число подвижных звеньев группы, pSG – число s-подвижных кинематических пар в группе. С другой стороны, как было показано выше, сумма
 (4.24)
(4.24)
представляет собой число неизвестных движущих сил и реакций в идеальных связях, подлежащих определению. Сравнивая выражения (4.23) и (4.24), замечаем, что nu=6NG, т.е. число неизвестных сил равно числу уравнений кинетостатики. Таким образом, уравнения кинетостатики могут решаться последовательно для каждой структурной группы.
Силовой расчет следует производить в направлении, обратном геометрическому и кинематическому расчетам, т.е. начинать его с групп последнего слоя. Тогда реакции во внешних кинематических парах групп m–го слоя оказываются известными и могут рассматриваться как заданные силы при расчете групп (m–1)-го слоя.
Особенности
расчета плоского механизма.
В плоском механизме, выделяя последовательно
плоские структурные группы, можно для
каждой из них определить отдельно
компоненты реакций, лежащих в плоскости
движения х0y
(Rx, Ry,
![]() ),
и обобщенные движущие силы. Компоненты
реакций, не лежащие в плоскости движения,
входят в другую группу уравнений. Часто
из-за наличия избыточных связей
определение всех реакций второй группы
(Rz,
),
и обобщенные движущие силы. Компоненты
реакций, не лежащие в плоскости движения,
входят в другую группу уравнений. Часто
из-за наличия избыточных связей
определение всех реакций второй группы
(Rz,
![]() ,
,
![]() )
становится невозможным; в этом случае
приходится ограничиваться определением
только реакций освобождающих связей.
)
становится невозможным; в этом случае
приходится ограничиваться определением
только реакций освобождающих связей.
Рассмотрим некоторые примеры.
а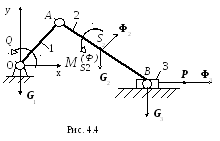 )
На рис.4.4 показан плоский механизм с
одной степенью подвижности, состоящий
из двух структурных групп: однозвенной
одноподвижной группы (звено 1)
и группы Ассура типа ВВП (звенья 2
и 3).
)
На рис.4.4 показан плоский механизм с
одной степенью подвижности, состоящий
из двух структурных групп: однозвенной
одноподвижной группы (звено 1)
и группы Ассура типа ВВП (звенья 2
и 3).
 На
рисунке нанесены активные силы: заданные
На
рисунке нанесены активные силы: заданные
![]() и подлежащие определению (движущий
момент Q), а также силы
инерции, лежащие в плоскости движения
и подлежащие определению (движущий
момент Q), а также силы
инерции, лежащие в плоскости движения
![]() ,
и проекции моментов сил инерции на ось
z, перпендикулярную
плоскости движения (
,
и проекции моментов сил инерции на ось
z, перпендикулярную
плоскости движения (![]() ).
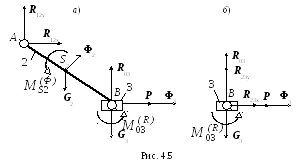
Силовой расчет начинается с последней
группы, т.е. группы Ассура ВВП (рис.4.5,
а). В
соответствии с принципом освобождаемости
от связей в шарнире А
и в ползуне В
приложены реакции отброшенных связей.
На рисунке показаны компоненты реакций,
лежащие в плоскости движения. Во
вращательных парах (например, в шарнире
А)
возникают реакции с компонентами Rx
и Ry, а в
поступательных парах (например, в
поступательной паре В)
– нормальная реакция R
и момент
).
Силовой расчет начинается с последней
группы, т.е. группы Ассура ВВП (рис.4.5,
а). В
соответствии с принципом освобождаемости
от связей в шарнире А
и в ползуне В
приложены реакции отброшенных связей.
На рисунке показаны компоненты реакций,
лежащие в плоскости движения. Во
вращательных парах (например, в шарнире
А)
возникают реакции с компонентами Rx
и Ry, а в
поступательных парах (например, в
поступательной паре В)
– нормальная реакция R
и момент
![]() .
Каждая компонента реакций снабжена
двумя индексами, указывающими номер
воздействующего звена и номер звена,
воспринимающего воздействие. Следовательно,
в шарнире А
со стороны звена 1
на звено 2
действуют компоненты реакции R12x
и R12y,
а в поступательной паре В
со стороны стойки 0
на ползун 3
действуют реакция R03
и момент
.
Каждая компонента реакций снабжена
двумя индексами, указывающими номер
воздействующего звена и номер звена,
воспринимающего воздействие. Следовательно,
в шарнире А
со стороны звена 1
на звено 2
действуют компоненты реакции R12x
и R12y,
а в поступательной паре В
со стороны стойки 0
на ползун 3
действуют реакция R03
и момент
![]() .
.
Реакция в шарнире В является внутренней для группы, поэтому она на рисунке не показана. Для того, чтобы включить в рассмотрение реакцию в шарнире В, надо отбросить либо звено 2, либо звено 3. На рис.4.5, б оставлено звено 3 (ползун); к указанным ранее силам добавлены компоненты реакции R23x и R23y, действующей со стороны звена 2 на звено 3.
Таким
образом, в группе ВВП в плоскости,
перпендикулярной оси z,
всего 6 неизвестных: R12x,
R12y,
R23x,
R23y,
R03,
![]() .
Для плоской двухзвенной группы можно
составить 6 независимых уравнений
кинетостатики. В некоторых случаях
удается так составить уравнения, чтобы
в них было по одному неизвестному.
Например, для звена 3
из условия равенства нулю суммы моментов
всех сил относительно оси Bz
(т.е. оси z, проходящей
через точку B) следует:
.
Для плоской двухзвенной группы можно
составить 6 независимых уравнений
кинетостатики. В некоторых случаях
удается так составить уравнения, чтобы
в них было по одному неизвестному.
Например, для звена 3
из условия равенства нулю суммы моментов
всех сил относительно оси Bz
(т.е. оси z, проходящей
через точку B) следует:
![]() .
.
Сумма моментов всех сил, действующих на звенья 2 и 3, относительно оси Аz:
(Р + Ф3)(yA – yB) – (R03 – G3)(xA – xB) + Ф2x(yA – yS2) –
– (Ф2y
– G2)(xA
– xS2)
+
![]() = 0,
= 0,
где Ф2х и Ф2y – проекции главного вектора сил инерции второго звена, хА, yA, xB, yB, xS2, yS2 – координаты точек соответственно А, В, S2. Отсюда можно найти реакцию R03. После этого легко определяются остальные неизвестные. Уравнения для ползуна 3:
R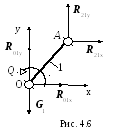 23x
+ P + Ф3
= 0,
23x
+ P + Ф3
= 0,
R03 + R23y – G3 = 0.
Уравнения для звеньев 2 и 3:
R12x + Ф2x + P + Ф3 = 0;
R12y + Ф2y – G2 + R03 – G3 = 0.
После определения всех реакций в группе ВВП переходят к расчету первой структурной группы (рис.4.6).
Реакции в шарнире А уже известны: в соответствии с третьим законом Ньютона R12x=–R21x, R12y=–R21y. Следовательно, остаются три неизвестные: компоненты реакции R01x, R01y в шарнире 0 и движущий момент Q. Для кривошипа можно составить три уравнения кинетостатики, из которых находятся оставшиеся неизвестные. Если угловая скорость вращения кривошипа постоянна и центр масс находится на оси вращения О, то уравнения кинетостатики можно записать в виде:
R21x + R01x = 0,
R21y + R01y – G1 = 0,
R21x(y0 – yA) – R21y(x0 – xA) + Q = 0.
П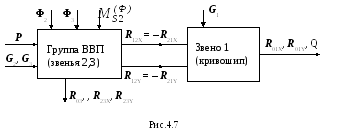 оследовательность
силового расчета проиллюстрирована на
схеме рис.4.7. Предварительно определяются
силы инерции
оследовательность
силового расчета проиллюстрирована на
схеме рис.4.7. Предварительно определяются
силы инерции
![]() .
Потом решаются 6 уравнений для звеньев
2 и 3
группы ВВП, входящей во второй слой,
находятся реакции R12x,
R12y,
R23x,
R23y,
R03,
.
Потом решаются 6 уравнений для звеньев
2 и 3
группы ВВП, входящей во второй слой,
находятся реакции R12x,
R12y,
R23x,
R23y,
R03,
![]() .
Затем решаются три уравнения для звена
1,
являющегося группой первого слоя.
Реакции R21x
и R21y
рассматриваются как известные (R12x
= – R21x,
R12y
= – R21y).
Определяются реакции R01x,
R01y
и движущий момент Q.
.
Затем решаются три уравнения для звена
1,
являющегося группой первого слоя.
Реакции R21x
и R21y
рассматриваются как известные (R12x
= – R21x,
R12y
= – R21y).
Определяются реакции R01x,
R01y
и движущий момент Q.
б) Механизм с тремя степенями подвижности (рис.4.8). Данный механизм состоит из трех одноподвижных групп: двух однозвенных (звенья 1 и 5) и одной трехзвенной (звенья 2, 3, 4). Определив силы инерции и моменты сил инерции звеньев, а также задав значения активных сил P3X и P3Y, приложенных в точке С3 звена 3, и момента Мw, приступаем к силовому расчету последней структурной группы АВСD. Для плоской системы сил, действующих на три звена этой группы, составляем 9 уравнений кинетостатики, из которых определяем обобщенную движущую силу Q2 и 8 реакций (R12X, R12Y, R23X, R23Y, R34X, R34Y, R54X, R54Y). Затем приступаем к расчету однозвенных групп первого слоя ОА и ЕD. При этом силы R21X = – R12X, R21Y = – R12Y, R45X = – R54X, R45Y = – R54Y рассматриваются уже как известные, найденные на предыдущем этапе. Из уравнений кинетостатики для звена ОА определяем R01X, R01Y и обобщенную движущую силу Q1; из уравнений, составленных для звена ЕD, определяем R05X, R05Y и обобщенную движущую силу Q3.
Н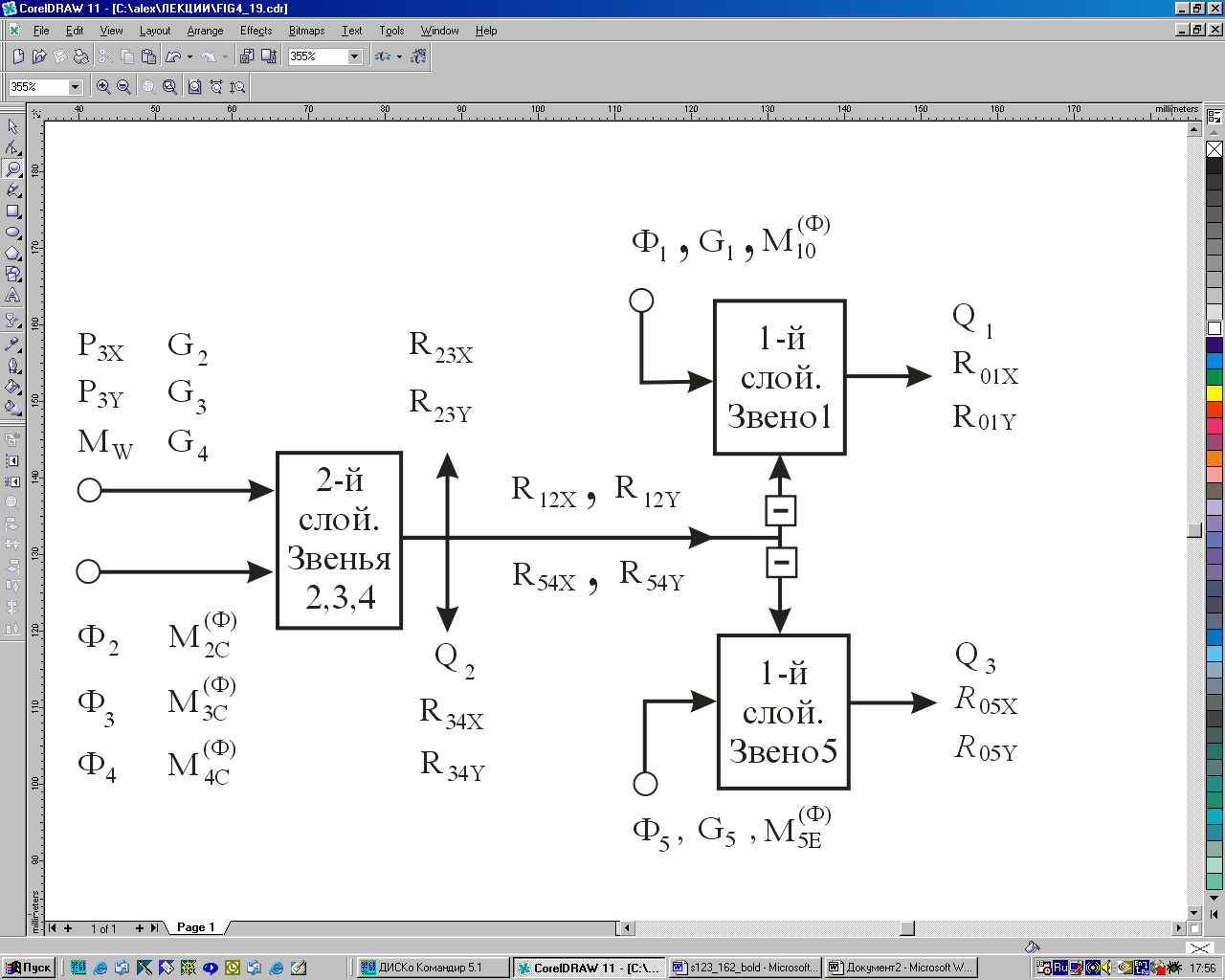 а
рис.4.9 схематично представлен алгоритм
силового расчета этого механизма. Для
каждой группы указаны заданные («входные»)
силы и силы, найденные при силовом
расчете.
а
рис.4.9 схематично представлен алгоритм
силового расчета этого механизма. Для
каждой группы указаны заданные («входные»)
силы и силы, найденные при силовом
расчете.
Рис.
4.9
Силовой расчет по кинетостатической модели может производиться не только решением уравнений кинетостатики, составленных для каждого звена в отдельности, но и с помощью других методов. Рассмотрим, каким образом можно провести расчет трехзвенной группы АВСD, показанной на рис.4.8, методом размыкания кинематической цепи. Разомкнем кинематическую цепь в шарнире D и введем реакции освобождающих связей R54X и R54Y. Составим уравнения равновесия моментов всех активных сил, всех сил инерции и введенных реакций связей относительно осей шарниров А, В, С. Получим три уравнения:
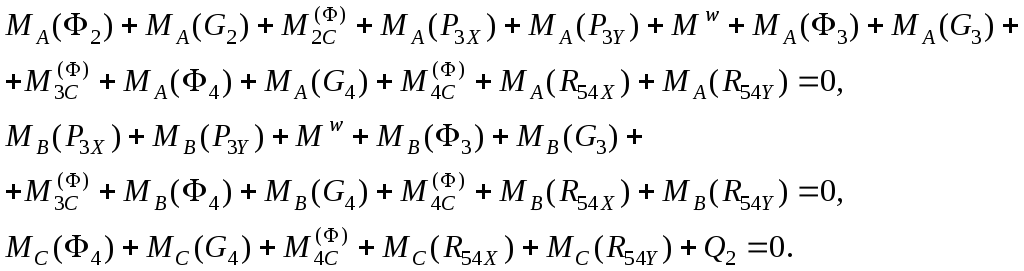
Из этих уравнений определяются три неизвестные величины: R54X, R54Y и Q2. После этого определение реакций в шарнирах А, В, С не вызывает затруднений; их можно найти, например, из уравнений проекций на оси х и y сил, действующих на звенья 2, 3, 4.
Решение уравнений кинетостатики усложняется, если в механизме имеются избыточные связи. В этом случае система становится статически неопределимой, поскольку число неизвестных реакций и движущих сил превосходит число уравнений кинетостатики. В ряде случаев удается избежать статической неопределимости увеличением подвижности некоторых кинематических пар (например, заменой вращательных пар цилиндрическими или сферическими); однако этот путь, связанный с изменением конструкции механизма, часто оказывается нежелательным как из-за снижения жесткости механической системы, так и по технологическим соображениям. В отдельных случаях оказывается возможным условно в расчетной схеме увеличить подвижность кинематических пар, учитывая некоторые свойства реальной конструкции. Так, например, наличие зазоров во вращательной паре (между осью шарнира и его втулкой) позволяет рассматривать при расчете эту пару как сферическую, считая равными нулю моменты, возникающие в ней при угловых перекосах. Однако в общем случае провести полный силовой расчет механизма с избыточными связями можно только за счет отказа от динамической модели жесткого механизма и введения расчетной схемы, учитывающей упругость звеньев и их соединений. Рассмотрение такой усложненной модели выходит за рамки дисциплины ТММ.
Вместе с тем всегда имеется возможность выполнить частичный силовой расчет механизма, ограничиваясь определением обобщенных движущих сил и реакций всех освобождающих связей. (Напомним, что освобождающей мы называем такую связь, устранение которой приводит к увеличению числа степеней подвижности механизма на единицу). Такой ограниченный расчет можно выполнить разными методами; один из них основан на использовании общего уравнения динамики.
4.4. Применение общего уравнения динамики
для силового расчета механизмов
Для любой системы материальных точек с идеальными связями сумма работ всех активных сил и всех сил инерции на любом возможном перемещении в любой фиксированный момент времени равна нулю. Это положение записывается в аналитической форме:
 (4.25)
(4.25)
и называется
уравнением Даламбера-Лагранжа
или общим уравнением динамики. В уравнении
(4.25)
![]() и
и
![]() – активная сила и сила инерции к-й
материальной точки,
– активная сила и сила инерции к-й
материальной точки,
![]() – ее возможное перемещение, т.е. любое
бесконечно малое перемещение, совместимое
с наложенными на систему связями в
данный фиксированный момент времени
(в отличие от действительного малого
перемещения, соответствующего бесконечно
малому приращению времени t);
М –
число материальных точек в системе.
– ее возможное перемещение, т.е. любое
бесконечно малое перемещение, совместимое
с наложенными на систему связями в
данный фиксированный момент времени
(в отличие от действительного малого
перемещения, соответствующего бесконечно
малому приращению времени t);
М –
число материальных точек в системе.
Р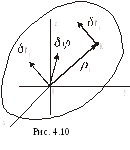 ассмотрим
звено механизма, являющееся абсолютно
твердым телом. Введем систему координат
0хyz,
связанную с этим телом (рис.4.10). Для
произвольной точки звена имеем
ассмотрим
звено механизма, являющееся абсолютно
твердым телом. Введем систему координат
0хyz,
связанную с этим телом (рис.4.10). Для
произвольной точки звена имеем
![]() ,
(4.26)
,
(4.26)
где
![]() –
возможное перемещение полюса 0,
–
возможное перемещение полюса 0,
![]() – вектор бесконечно
малого поворота,
– вектор бесконечно
малого поворота,
![]() –
радиус-вектор к-й
точки. Подставив (4.26) в (4.25), находим
–
радиус-вектор к-й
точки. Подставив (4.26) в (4.25), находим
 (4.27)
(4.27)
Здесь
![]() и
и
![]() – главные векторы, а
– главные векторы, а
![]() и
и
![]() – главные моменты активных сил и сил
инерции звенa. Складывая
выражения (4.27) для всех подвижных звеньев,
приводим уравнение (4.25) для механизма
с жесткими звеньями и идеальными
кинематическими парами к следующей
форме
– главные моменты активных сил и сил
инерции звенa. Складывая
выражения (4.27) для всех подвижных звеньев,
приводим уравнение (4.25) для механизма
с жесткими звеньями и идеальными
кинематическими парами к следующей
форме
 (4.28)
(4.28)
где N – число подвижных звеньев. Необходимо отметить, что каждое из выражений (4.27) в отдельности нулю не равно, поскольку не равна нулю работа сил реакций, действующих на каждое отдельное звено.
Если механизм имеет w степеней свободы и q1,…,qw – его обобщенные координаты, то
 (4.29)
(4.29)
Подставляя (4.29) в (4.28) и используя независимость вариаций обобщенных координат qS, получаем следующую систему уравнений:
 .
(4.30)
.
(4.30)
Отметим,
что выражение
![]() следует понимать не как частную
производную от функции положения i
(q1,
…, qw ),
поскольку вектор угла поворота в общем
случае вообще не существует как функция
положения, а как отношение бесконечно
малого угла поворота
следует понимать не как частную
производную от функции положения i
(q1,
…, qw ),
поскольку вектор угла поворота в общем
случае вообще не существует как функция
положения, а как отношение бесконечно
малого угла поворота
![]() к бесконечно малому парциальному
возможному перемещению qS.
Выражение
к бесконечно малому парциальному
возможному перемещению qS.
Выражение
![]() может
рассматриваться также как отношение
парциальной угловой скорости
может
рассматриваться также как отношение
парциальной угловой скорости
![]() к скорости
к скорости
![]() при
при
![]() = 0 для всех ks.
Производная
= 0 для всех ks.
Производная
![]() является обычной частной производной
от функции положения r0i(
q1,
…, qw) по
координате qS.
является обычной частной производной
от функции положения r0i(
q1,
…, qw) по
координате qS.
Для механизма с одной степенью подвижности система (4.30) сводится к одному уравнению
 (4.31)
(4.31)
Поскольку
в этом случае
![]() ,
где
,
где
![]() – скорость точки 0i,
уравнение (4.31) записывается также в
форме
– скорость точки 0i,
уравнение (4.31) записывается также в
форме
 (4.32)
(4.32)
Отсюда следует, что сумма возможных мощностей всех активных сил и сил инерции в любой момент времени равна нулю для механизма с одной степенью подвижности при идеальных кинематических парах.
Уравнение Даламбера-Лагранжа в форме (4.28) удобно использовать для определения обобщенных движущих сил. Учитывая, что работа движущей силы QS на возможном перемещении qS равна QSqS , и выделяя обобщенные движущие силы из прочих активных сил, имеем
 (4.33)
(4.33)
где
![]() – главный вектор всех
активных сил, приложенных к i–му
звену, кроме движущих, а
– главный вектор всех
активных сил, приложенных к i–му
звену, кроме движущих, а
![]() –
главный момент этих сил. Из (4.33) получаем
уравнения, аналогичные (4.30):
–
главный момент этих сил. Из (4.33) получаем
уравнения, аналогичные (4.30):
 .
(4.34)
.
(4.34)
Эти уравнения могут быть непосредственно использованы для определения обобщенных движущих сил QS. Отметим, что они остаются в силе и для механизмов с любым числом избыточных идеальных связей. Для механизма с одной степенью подвижности из (4.31) находим:
 (4.35)
(4.35)
Рассмотрим в качестве примера задачу об определении движущей силы для рычажного механизма, показанного на рис.4.4. Поскольку в плоском механизме векторы возможных перемещений всех точек параллельны плоскости движения, а векторы малых поворотов звеньев перпендикулярны ей, для составления уравнений Даламбера-Лагранжа достаточно определить компоненты активных сил и сил инерции, лежащие в плоскости движения, и компоненты моментов, ей перпендикулярные. Остальные компоненты сил и моментов не совершают работы на возможном перемещении плоского механизма, а следовательно, и не влияют на величины движущих сил.
Уравнение Даламбера-Лагранжа для механизма, показанного на рис.4.4, составляем в форме (4.35); получаем
 (4.36)
(4.36)
где 2 – абсолютный угол поворота звена 2.
Общее уравнение динамики позволяет определить реакции всех освобождающих связей. Пусть, например, для механизма, показанного на рис.4.4, требуется определить реакцию R03 в поступательной паре. Освободим связь, соответствующую этой реакции; для этого введем условную дополнительную степень подвижности, предположив, что направляющая ползуна может перемещаться в направлении оси y (рис.4.11). Тогда получим механизм с двумя степенями подвижности, в котором координата yB будет играть роль второй входной координаты, а реакция R03 станет обобщенной «движущей» силой, соответствующей этой координате.
Применим к этому механизму общее уравнение динамики в форме (4.34); для силы R03 получим следующее выражение:
 (4.37)
(4.37)
Отметим,
что силы и моменты сил инерции, входящие
в это выражение, должны определяться
при заданных значениях
![]() и при yB = 0,
и при yB = 0,
![]() = 0,
= 0,
![]() =0,
т.е. они должны вычисляться для заданного
движения исследуемого механизма без
какого-либо учета дополнительной
подвижности. Выражение (4.37) получено из
условия равенства нулю работ активных
сил и сил инерции на возможном перемещении,
соответствующем q
= 0, yB
0.
Легко видеть, что при таком перемещении
работу будут совершать только силы,
приложенные к звеньям 2
и 3. При
этом из уравнения (4.37) получим
=0,
т.е. они должны вычисляться для заданного
движения исследуемого механизма без
какого-либо учета дополнительной
подвижности. Выражение (4.37) получено из
условия равенства нулю работ активных
сил и сил инерции на возможном перемещении,
соответствующем q
= 0, yB
0.
Легко видеть, что при таком перемещении
работу будут совершать только силы,
приложенные к звеньям 2
и 3. При
этом из уравнения (4.37) получим
 (4.38)
(4.38)
Из геометрических соображений (см. рис.4.11) можно получить, что
 (4.39)
(4.39)
П одставив
(4.39) в (4.38), находим величину R03
в заданном положении. Изложенный метод
можно применить для определения реакции
любой освобождающей связи. Что же
касается неосвобождающих связей, то
соответствующие им реакции в принципе
невозможно определить в процессе
силового расчета механизма.
одставив
(4.39) в (4.38), находим величину R03
в заданном положении. Изложенный метод
можно применить для определения реакции
любой освобождающей связи. Что же
касается неосвобождающих связей, то
соответствующие им реакции в принципе
невозможно определить в процессе
силового расчета механизма.