

3.3.2Ошибки в сэп
Ошибки влияют на следующие параметры:
Точность обработки (воспроизводимость задания).
Шероховатость, то есть качество обработки.
Производительность.

Рисунок 91 – СЭП на базе ШИП и микропроцессорном регуляторе
В общем виде структурную систему можно представить следующим образом:
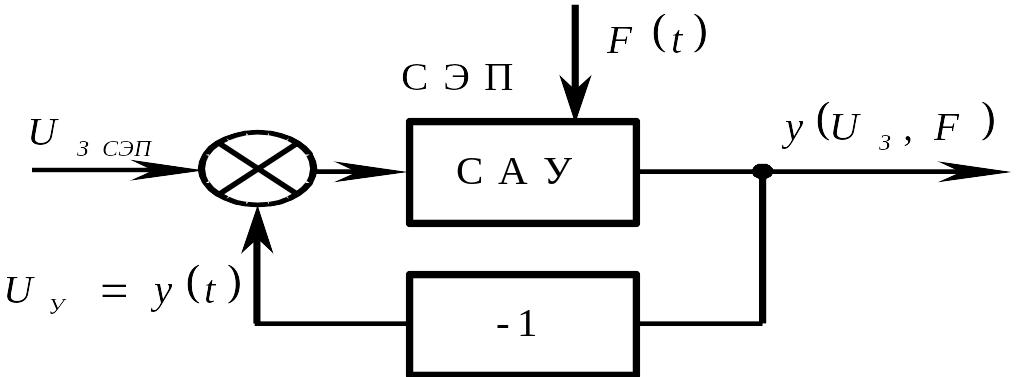
![]() —
возмущение,
—
возмущение,
![]() — статическая погрешность по управляющему
и по возмущающему воздействию.
— статическая погрешность по управляющему
и по возмущающему воздействию.
Причины возникновения ошибок в сау сэп
Статическая погрешность - определяется
 и
и
 .
.Форма задания
Статические свойства САУ:
статическая САУ;
астатическая САУ порядка;
астатическая САУ порядка.
Установка датчика на станке:
ДП на столе;
ДП на ходовом винте;
ДП на ДПТ.
РЭП входит составной частью в СЭП.
В СЭП существуют следующие погрешности:
 — моментная ошибка;
— моментная ошибка;
 (по положению).
(по положению). — ошибка по скорости.
— ошибка по скорости. ,
,
 — динамическая ошибка.
— динамическая ошибка.
Рассмотрим эти погрешности подробнее:
или
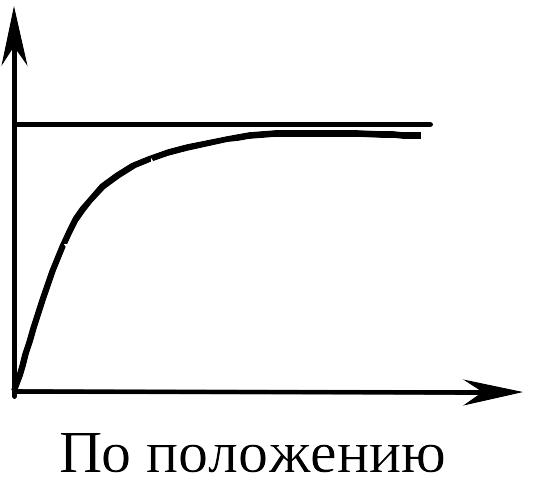
 ошибка по положению, которая равна
величине статической погрешности при
отработке задания по положению (рис.
92):
ошибка по положению, которая равна
величине статической погрешности при
отработке задания по положению (рис.
92):
![]() ,
,
![]() ,
,
![]() реакция привода,
реакция привода,
где ![]() — коэффициент передачи системы по
моменту:
— коэффициент передачи системы по
моменту:
![]()
![]()
![]() ,
,
где
— коэффициент передачи по скорости
(РЭП);
![]() — статический момент;
— статический момент;
![]() — величина углового перемещения;
— величина углового перемещения;
![]() — передаточное число редуктора;
— передаточное число редуктора;
![]() — жесткость характеристики для РЭП.
— жесткость характеристики для РЭП.
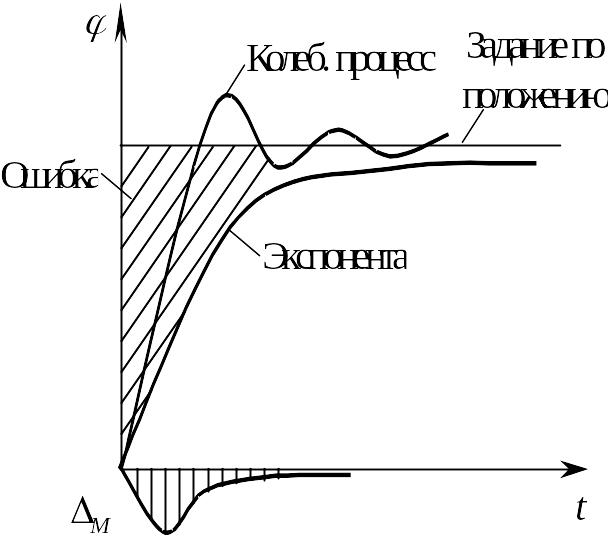
Рисунок 92 – Ошибка по положению
 - ошибка по скорости (статическая) (рис.
93).
- ошибка по скорости (статическая) (рис.
93).
![]() .
.
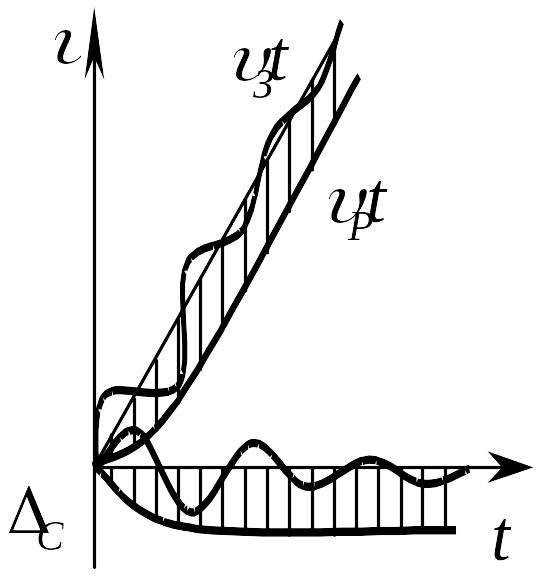
Рисунок 93 – Ошибка по скорости
При
отработке задания по скорости погрешность
зависит от величины задания
![]() (прямо пропорционально) и обратно
пропорционально коэффициенту передачи
по скорости, причем
(прямо пропорционально) и обратно
пропорционально коэффициенту передачи
по скорости, причем
![]() ,
,
где
— учитывает настройку ЧПУ;
![]() — учитывает связь между скоростью
двигателя и напряжением управления в
ЧПУ;
— передаточное число редуктора.
— учитывает связь между скоростью
двигателя и напряжением управления в
ЧПУ;
— передаточное число редуктора.
Динамическая погрешность.
Динамические
погрешности появляются в момент
появления управляющих или возмущающих
воздействий на систему
![]() и
и
![]() ,
а также зависят от свойств регулируемого
электропривода: инерционные свойства
,
а также зависят от свойств регулируемого
электропривода: инерционные свойства
![]() ,
,
![]() ,
,
![]() .
Погрешности влияют на точность отработки
задания, качество и производительность.
.
Погрешности влияют на точность отработки
задания, качество и производительность.

Рисунок 94 – Динамическая погрешность
3.4Динамика сэп
Оценка динамических свойств осуществляется по идеям, заложенным в РЭП. Распространен метод структурных схем и дифференциальных уравнений Коши.
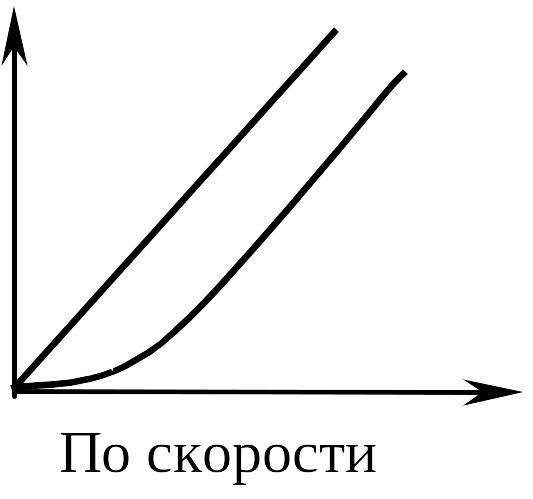
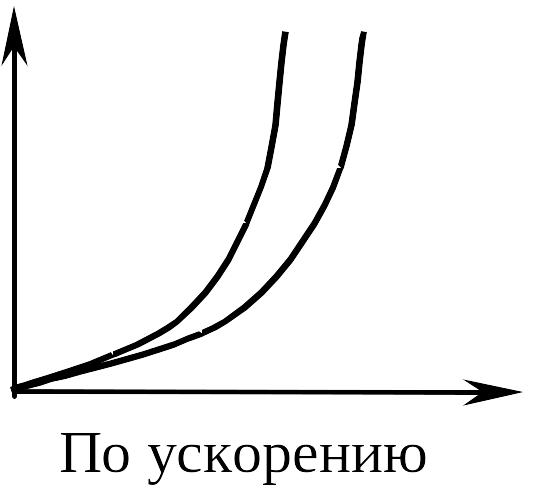
Динамика предполагает построение кривых переходных процессов для выходных параметров (рис. 95).
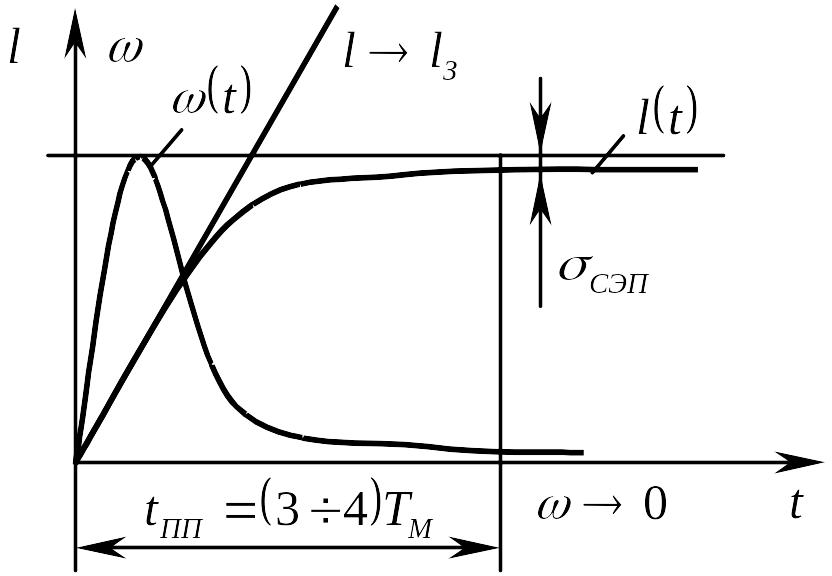
Рисунок 95 – Переходные процессы для выходных параметров
Для получения такого вида переходных процессов добавляется звено на выходе системы, которое представляет собой интегрирующий элемент:
![]() ,
где
,
где
![]() .
.
![]() ,
,
![]() .
.
Здесь
неизвестен коэффициент
![]() .
.
![]() ,
где
,
где
![]() .
.
 ,
где
,
где
![]() .
.
![]() .
.
По
полученным кривым переходных процессов
определяются точностные и скоростные
параметры
![]() ,
,
![]() .
.