

2) Операция сложения двух векторов - правило треугольника.
3)Линейная комбинация векторов
Линейной
комбинацией векторов ![]() называют
вектор
называют
вектор
![]()
где ![]() -
коэффициенты линейной комбинации.
Если
-
коэффициенты линейной комбинации.
Если ![]() комбинация
называется тривиальной, если
комбинация
называется тривиальной, если ![]() -
нетривиальной.
-
нетривиальной.
Линейная зависимость и независимость векторов
Система ![]() линейно
зависима
линейно
зависима ![]()
 что
что 
Система
линейно
независима 
Критерий линейной зависимости векторов
Для того чтобы векторы (r > 1) были линейно зависимы, необходимо и достаточно, чтобы хотя бы один из этих векторов являлся линейной комбинацией остальных.
3) Базис. Разложение векторов по базису.
Определение. Базисом
в пространстве Rn называется
любая система из n-линейно
независимых векторов. Каждый вектор из
Rn,
не входящих в базис, можно представить
в виде линейной комбинации базисных
векторов, т.е. разложить по базису.
Пусть ![]() –
базис пространства Rn и
–
базис пространства Rn и ![]() .
Тогда найдутся такие числа λ1,
λ2,
…, λn,
что
.
Тогда найдутся такие числа λ1,
λ2,
…, λn,
что ![]() .
Коэффициенты разложения λ1,
λ2,
…, λn,
называются координатами вектора
.
Коэффициенты разложения λ1,
λ2,
…, λn,
называются координатами вектора ![]() в
базисе В. Если задан базис, то коэффициенты
вектора определяются
однозначно.
Пример. Доказать,
что векторы
в
базисе В. Если задан базис, то коэффициенты
вектора определяются
однозначно.
Пример. Доказать,
что векторы ![]() образуют
базис в R3.
Решение. Покажем, что равенство
образуют
базис в R3.
Решение. Покажем, что равенство ![]() возможно
только при λ1 =
λ2 =
λ3 =0:
возможно
только при λ1 =
λ2 =
λ3 =0:
![]() или
или  Решив систему, получим λ1=0,
λ2=0,
λ3=0.
Так как все λi=0
(i=1,2,3),
то
Решив систему, получим λ1=0,
λ2=0,
λ3=0.
Так как все λi=0
(i=1,2,3),
то ![]() -
линейно независимы. Они могут составить
базис в R3.
Очевидно, любой новый набор из
векторов
-
линейно независимы. Они могут составить
базис в R3.
Очевидно, любой новый набор из
векторов ![]()
![]()
![]() может
тоже быть взятым в качестве базиса в
R3.
Итак, базис может быть выбран неединственным
образом.
Замечание. В
каждом n-мерном
векторном пространстве можно выбрать
бесчисленное множество различных
базисов. В различных базисах один и тот
же вектор имеет различные координаты,
но единственные в выбранном базисе.
может
тоже быть взятым в качестве базиса в
R3.
Итак, базис может быть выбран неединственным
образом.
Замечание. В
каждом n-мерном
векторном пространстве можно выбрать
бесчисленное множество различных
базисов. В различных базисах один и тот
же вектор имеет различные координаты,
но единственные в выбранном базисе.
4) Проекция вектора на ось. Координаты вектора и его свойства
Пусть в декартовых координатах OXYZ вектор AB задан координатами начала А(х1;у1;z1) и конца В(х2;у2;z2) этого вектора.
Нам уже известно определение проекции точки на ось как основания перпендикуляра, проходящего через заданную точку.
Проекцией вектора AB на ось ОХ называется разность между абсциссами проекции конца и начала вектора AB.
т.е. ПРох AB=х2-х1, ПРоу AB=у2-у1, ПРoz AB=z2-z1.
Для краткости используют следующие обозначения данных проекций:
ПРох AB=Х, ПРоу AB=У и ПРоz AB=Z, тогда получаем Z=z2-z1, Х=х2-х1,
У=у2-у1.
Из рассмотренных формул следует, что проекция вектора на любую ось есть длина отрезка между основаниями перпендикуляров, опущенных из точек А и В на эту же ось, взятая со знаком “+”, если направление отрезка и направление оси совпадают, и со знаком “-“, если они противоположны.
Можно доказать, что: а) если проекции вектора заданы, то они однозначно определяют сам вектор; б) если два вектора равны, то они имеют равные проекции,
поэтому проекции вектора на оси называют его координатами
AB=(Х;У;Z).
Некоторые свойства проекции вектора на ось:
Для определённости будем рассматривать эти свойства относительно оси ОХ.
Предположим, что вектор a=AB образует с осью ОХ угол φ.
Угол между вектором a и осью определим следующим образом.
Через произвольную точку пространства проведем 2 луча – один ║ положительному направлению ОХ, а другой - ║ направлению вектора. Угол между лучами определяет угол между вектором и осью.
Проекция вектора на ось ОХ равна произведению длины вектора на косинус угла между вектором и осью.
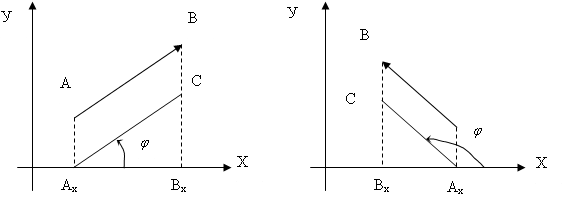
Рис. 1.15. Проекция вектора на ось
Пусть задан вектор AB и АхВх - его проекция на ось ОХ. Опустив перпендикуляр из точки А на ось ОХ, получаем Ах.
Проведем через точку А прямую ║ вектору AB до пересечения ВВх и получим точку с. Из треугольника СВхА имеем
ПР ох AB=А хВх=│А хC│cosφ=│АВ│cosφ
Проекция суммы нескольких векторов на ось равна сумме проекций складываемых векторов на ту же осью;
При умножении вектора AB на число m, его проекция умножится на то же число m.