

6. Определение, назначение, принцип работы и устройство барабанного, кулачкового и плоского контроллера.
Контроллером называется многоступенчатый, многоцепной аппарат с ручным управлением, предназначенный для изменения схемы главной цепи двигателя или цепи возбуждения. Кроме того, контроллеры также применяются для изменения сопротивлений, включенных в эти цепи. По своему конструктивному исполнению контроллеры делятся на барабанные, кулачковые и плоские.
Барабанные контроллеры. На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сегмента 3. Сегментодержатель изолирован от вала изоляцией 4. Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении вала 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. Вдоль вала расположено большое число контактных элементов. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательность замыкания различных контактных элементов обеспечивается различной длиной их сегментов.
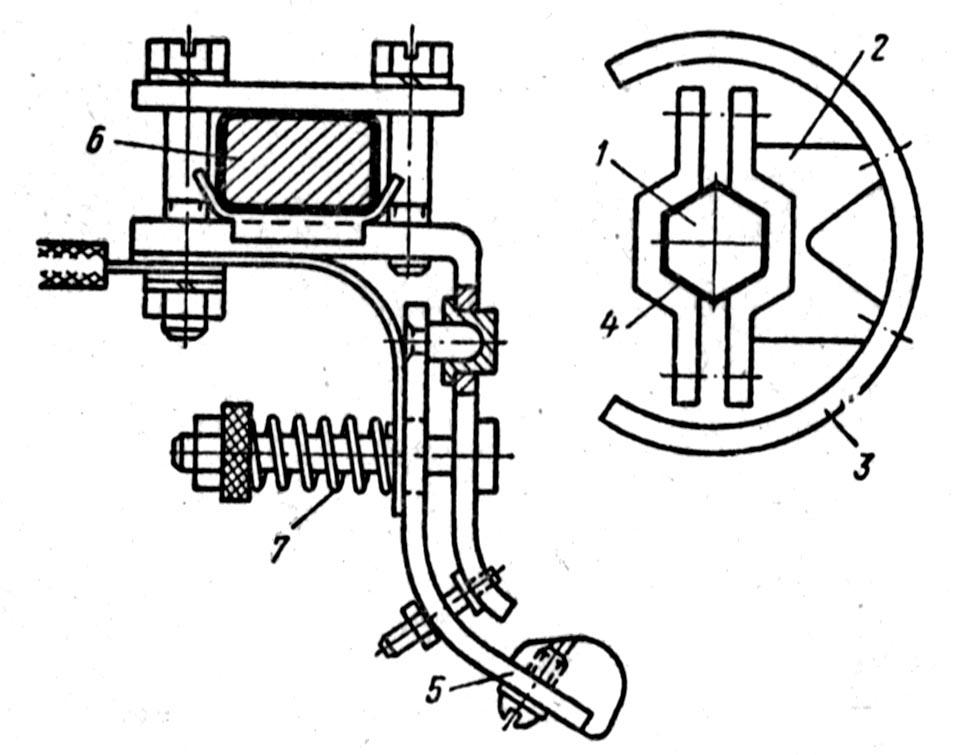
Рис.1. Контактный элемент барабанного контроллера.
Кулачковые контроллеры. В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра О2, расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1,3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При этом сжимается пружина 5 и контакты /, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера.
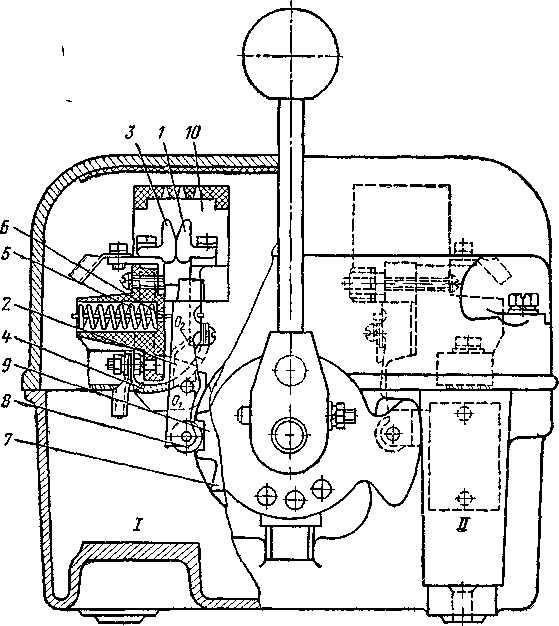
Рис.2. Кулачковый контроллер.
Плоские контроллеры. Для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей необходимо иметь большое число ступеней. Применение кулачковых контроллеров здесь нецелесообразно, так как большое число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Поэтому особых требований к контроллеру с точки зрения износостойкости не предъявляется. В этом случае широкое распространение получили плоские контроллеры.
На рис.3 показан общий вид плоского контроллера для регулирования возбуждения. Неподвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большое число ступеней. При той же длине контроллера число ступеней может быть увеличено путем применения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней удваивается. Подвижный контакт выполнен в виде медной щетки. Щетка располагается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может одновременно производить переключения в трех независимых цепях. Траверса перемещается с помощью двух винтов 6, приводимых в движение вспомогательным двигателем 7. При наладочных работах перемещение траверсы вручную производится рукояткой 8. В конечных положениях траверса воздействует на конечные выключатели 9, которые останавливают двигатель. Для того чтобы иметь возможность точной остановки контактов на желаемой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а двигатель должен иметь торможение. Плоский контроллер может иметь и ручной привод.

Рис.3. Плоский контроллер.
Преимущества и недостатки разных типов контроллеров.
Барабанные контроллеры.
Вследствие малой износостойкости контактов допустимое число включений контроллера в час превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60% номинальной, из-за чего такие контроллеры применяются при редких включениях.
Кулачковые контроллеры.
В контроллере используется перекатывающийся линейный контакт. Благодаря перекатыванию контактов дуга, загорающаяся при размыкании, не воздействует на поверхность контакта, участвующую в проведении тока в полностью включенном состоянии.
Малый износ контактов позволяет увеличить число включений в час до 600 при продолжительности включения 60%.
Конструкция контроллера имеет следующую особенность: выключение происходит за счет выступа кулачка, а включение за счет силы пружины. Благодаря этому контакты удается развести даже в случае их сваривания.
Недостатком этой системы является большой момент на валу, создаваемый включающими пружинами при значительном числе контактных элементов. Возможны и другие конструктивные оформления привода контактов. В одном из них контакты замыкаются под действием кулачка и размыкаются под действием пружины, в другом и включение и отключение совершается кулачком. Однако они применяются редко.
Плоские контроллеры.
Плоские контроллеры получили широкое распространение для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей. Так как необходимо иметь большое число ступеней, то применение кулачковых контроллеров здесь нецелесообразно, потому что большое число ступеней ведет к резкому возрастанию габаритов аппарата.
При размыкании между подвижным и неподвижным контактом появляется напряжение, равное падению напряжения на ступени. Для того чтобы не появлялась дуга, допустимое падение напряжения на ступени берется от 10 В (при токе 200 А) до 20 В (при токе 100 А). Допустимое число включений в час определяется износом контактов и не превосходит обычно 10—12. Если напряжение на ступени равно 40—50 В, то применяется специальный контактор, который перемыкает соседние контакты во время перемещения щетки.
В случае, когда необходимо производить коммутацию цепи при токах 100 А и более с частотой включений в час 600 и выше, применяется система, состоящая из контактора и командоаппарата.
Примеры применения контроллеров в электроприводе.
Командоаппаратом называется устройство, предназначенное для переключений в цепях управления силовых электрических аппаратов (контакторов). Иногда они применяются для непосредственного пуска электрических машин малой мощности, для включения электромагнитов и другого оборудования. Командоаппараты могут иметь ручной привод (кнопки, ключи управления, командоконтроллеры) или могут приводиться в действие контролируемым механизмом (путевые выключатели).
Н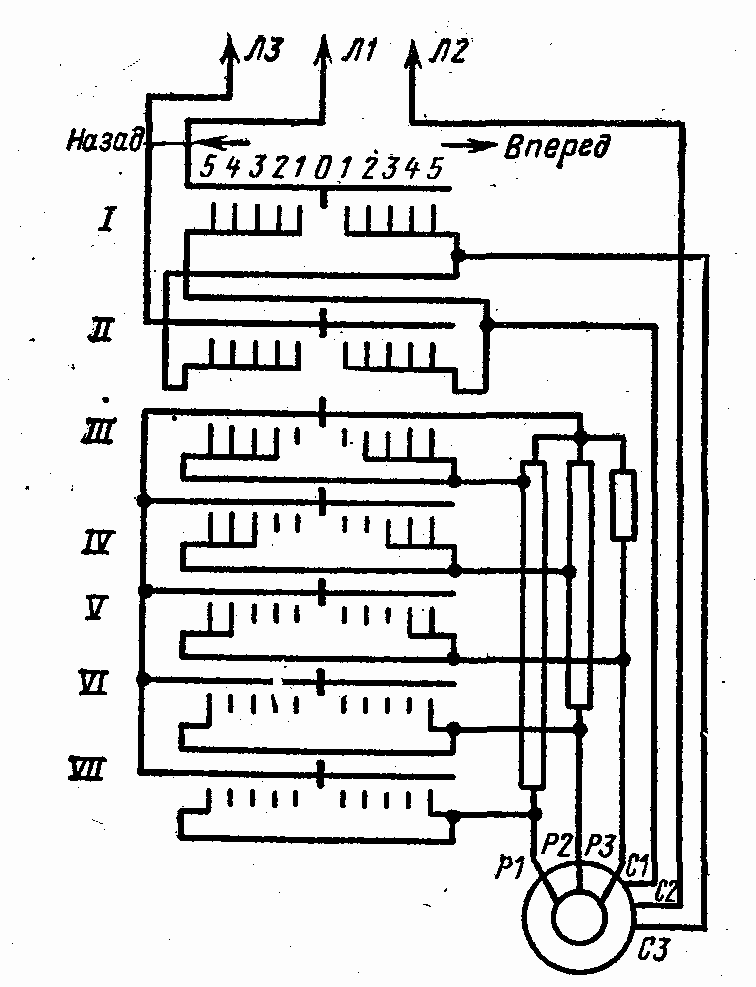 а
рис.4 показана схема для пуска асинхронного
двигателя с фазным ротором с помощью
кулачкового контроллера. Контакты
обозначены римскими цифрами,
арабскими — позиции вала аппарата.
При пуске «вперед» работают контактные
элементы, расположенные справа. Рассмотрим
третью позицию. В этой позиции замкнуты
контакты /, //, ///,IV.
При этом
статор подключен к сети, а в роторе
выведены первые ступени пусковых
резисторов в двух фазах. В пятом
положении все контакты замкнуты и ротор
двигателя закорочен.
а
рис.4 показана схема для пуска асинхронного
двигателя с фазным ротором с помощью
кулачкового контроллера. Контакты
обозначены римскими цифрами,
арабскими — позиции вала аппарата.
При пуске «вперед» работают контактные
элементы, расположенные справа. Рассмотрим
третью позицию. В этой позиции замкнуты
контакты /, //, ///,IV.
При этом
статор подключен к сети, а в роторе
выведены первые ступени пусковых
резисторов в двух фазах. В пятом
положении все контакты замкнуты и ротор
двигателя закорочен.
Рис.4. Схема соединений кулачкового контроллера для
пуска асинхронного двигателя с фазным ротором.
Кнопки управления. Простейшим командоаппаратом является кнопка управления. Кнопка используется для различных схем пуска, остановки и реверса двигателей путем замыкания и размыкания обмоток контакторов, которые коммутируют главную цепь, а также для управления самыми различными схемами автоматики. Основной частью кнопки является кнопочный элемент, разрез которого показан на рис.5. Для повышения надежности работы контакты выполняются из серебра.

Рис.5. Кнопка управления.
Командоконтроллеры.
Широкое распространение получили нерегулируемые кулачковые командоконтроллеры. На рис.6 представлен разрез командоконтроллера постоянного тока. Принцип действия аналогичен принципу действия силового кулачкового контроллера. С помощью мостикового контакта 1 в отключаемой цепи создаются два разрыва, что облегчает гашение дуги. Кулачковый привод, большое расстояние контактов от центра вращения О рычага 2, большой межконтактный промежуток позволяют получить высокую скорость расхождения контактов и увеличить ток отключения почти в 4 раза по сравнению с током отключения кнопочного элемента. Моменты замыкания и размыкания контактов зависят от профиля кулачка 3. Положение вала фиксируется с помощью рычажного фиксатора 4. При вращении вала командоконтроллера происходит управление соответствующими силовыми контакторами, которые в свою очередь осуществляют коммутацию в силовых цепях двигателя.
При необходимости точной регулировки момента срабатывания применяются регулируемые кулачковые командоконтроллеры. Достоинством такого механизма является независимость скорости размыкания контактов от частоты вращения вала. Это даёт возможность использовать регулируемый командоконтроллер в качестве путевого выключателя с малой частотой вращения вала.

Рис.6. Нерегулируемый кулачковый командоконтроллер.
Путевые, конечные выключатели и микровыключатели. Путевой выключатель предназначен для замыкания или размыкания контактов цепи с небольшим током в зависимости от положения рабочего органа управляемой машины или аппарата. Конечные выключатели являются частным случаем путевых, поскольку конечный выключатель служит для коммутации цепей в крайних положениях органа управляемой машины.
Путевые выключатели в зависимости от способа привода контактов можно разбить на кнопочные, рычажные и шпиндельные. В кнопочном путевом выключателе контролируемый орган машины воздействует на шток кнопочного элемента (рис.5). Особенностью этого выключателя является размыкание и замыкание контактов с такой же скоростью, что и скорость контролируемого органа. При небольшой величине тока гашение дуги происходит за счет механического растяжения, и при малом растворе контактов она вообще может не погаснуть.
В том случае, когда требуется остановить машину или сделать соответствующие переключения с высокой точностью применяются микропереключатели (рис.7).

Рис.7. Путевой микропереключатель.
Неподвижные контакты 1 и 2 укреплены в пластмассовом корпусе 7. Подвижный контакт 3 укреплён на конце специальной пружины. Пружина состоит из двух частей: плоской 4 и фигурной 5. В указанном положении пружина создаёт давление на верхний контакт 2. При нажатии на головку происходят деформация пружины и переброс контакта в крайнее нижнее положение. Переход контакта из верхнего положения в нижнее совершается очень быстро.
Если необходимо обеспечить надежную работу переключателя при больших ходах и больших токах, применяются рычажные переключатели. Принцип действия одного из таких переключателей показан на рис.8. Контролируемый орган воздействует на ролик 1, укрепленный на конце рычага 2. На другом конце рычага находится подпружиненный ролик 12, который может перемещаться вдоль оси рычага. В указанном на рисунке положении замкнуты контакты 7 и 8. Положение механизма надежно зафиксировано защелкой 6. При воздействии на ролик 1 рычаг 2 поворачивается против часовой стрелки. Ролик 12 поворачивает тарелку 11 и связанные с ней контакты 8 и 9. При этом контакты 7 и 8 размыкаются, а 9 и 10 замыкаются. Замыкание и размыкание контактов происходит с большой скоростью, не зависящей от скорости движения ролика 1.

Рис.8. Рычажный путевой переключатель.