

СаУсепарацією картоплі
Електричний опір
бульби з непорушеною шкіркою мало
відрізняється від опору грудок грунту.
Якщо ж шкірка бульб проколюється або
надрізається електродами, то опір
м'якоті бульби різко зменшується і стає
значно меншим, ніж в грунтових грудок.
Так, наприклад, електричний опір грудки
грунту при середній вогкості
![]() = 16,1 %
дорівнює
243 Ом, в той же час в свіжовикопаної
бульби нормальної вогкості воно складало
лише 69,9 Ом.
= 16,1 %
дорівнює
243 Ом, в той же час в свіжовикопаної
бульби нормальної вогкості воно складало
лише 69,9 Ом.
Пристрій для відділення бульб від грудок, заснованих на відмінності їх електричних опорів, показано на рис. 7.
Рис.
26.
Пристрій
для відділення бульб картоплі від
каменів і грунтових грудок залежно
від їх
опору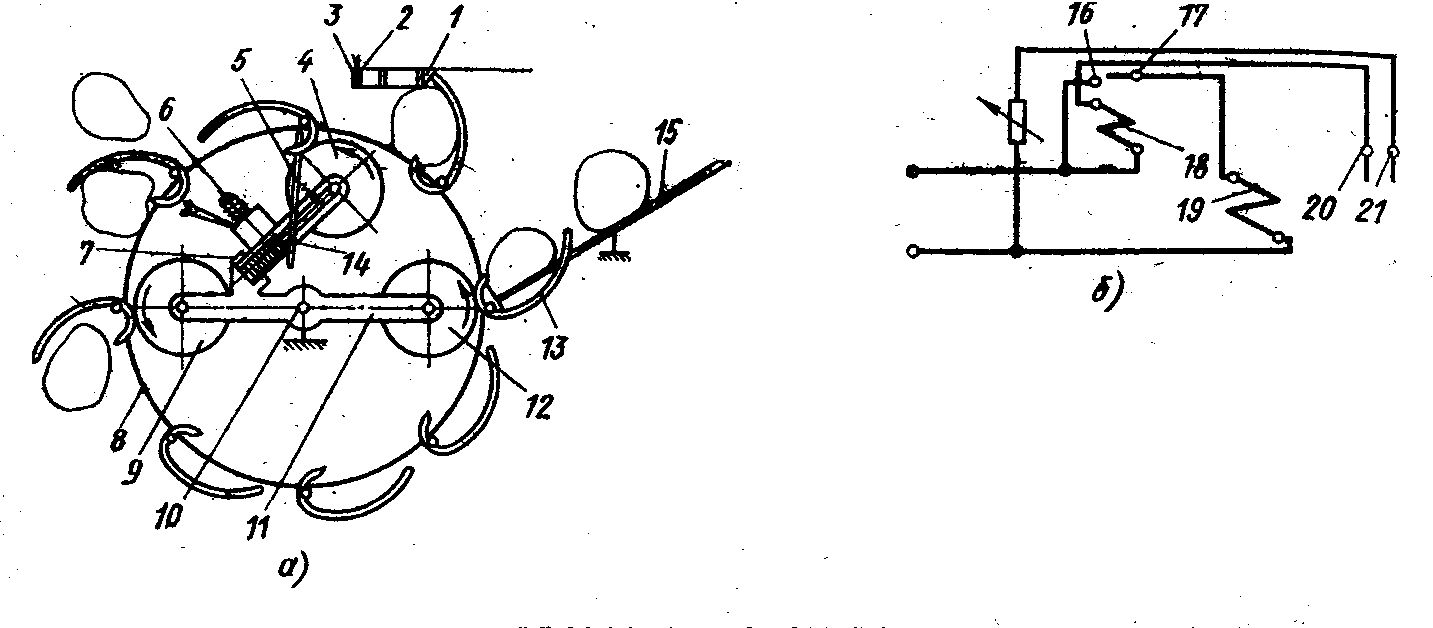
Ніж 3 (рис. 26,а) і два струмонесучих контакти 2 послідовно включені між собою і розташовані по напряму руху транспортера. Ніж і контакти змонтований на підпружиненому важелі 1. При зустрічі з твердою грудкою грунту або каменем ніж, виступаючи над контактами, підводить останні, і ланцюг її замикається.
Транспортер 8, виконаний у вигляді циліндрів, насаджених на нерухомій осі 10, вільно обертається з лінійною швидкістю, рівної швидкості руху агрегату. На поверхні циліндра є 10—20 каналів з шарнірно закріпленими на рівній відстані по колу вісьма підпружиненими лапками 13, захоплюючими при обертанні циліндра бульби або грудки грунту з транспортера 15. . На нерухомій осі змонтовані кронштейни 11, несучі два шарнірно закріплені ролики 9 і 12, і зірочка 4, яка утримується від руху по прорізу пружиною 7. Ролики 9 і 12, впливаючи на нижні кронштейни лапок, сприяють захопленню каменів і грудок грунту і утримують їх при проходженні мимо струмонесучих контактів, що не дають при цьому сигналу. Камені і грудки скидаються вниз мимо бункерів.
При проходженні бульб мимо ножа останній наносить подряпину і, створюючи цим струмопровідне середовище, за допомогою струмонесучих контактів передає сигнал, унаслідок чого якір соленоїда 6 входить в отвір 14 і не дозволяє зірочці 4 пересуватися по прорізу. Лапка, несуча бульбу, перекидається, і бульба скочується в бункер. Важіль 5 фіксує положення якоря. При русі лапка натискує на важіль, який звільняє якір.
Контакти 20 (рис. 26, б) і 21 замикаються по поверхні проходячої під ними бульби картоплі і замикають контакти 16 і 17. Силові контакти замикають ланцюг соленоїдів 18 і 19 і примушують утримувати зірочку 4 в потрібному положенні.
Проте цей і інші подібні робочі органи не знайшли застосування в машинах, оскільки вимагають навмисного пошкодження (надрізання) бульб ножовими електродами на глибину до 5 мм, що неприпустимо. Крім того, при підвищенні вогкості грунтових грудок до 22 % розділення бульб і грудок по електричному опору стає неможливим, оскільки електричний опір грудок падає і може стати навіть меншим, ніж в бульб.
Встановлено, що електрична провідність бульб і грудок грунту залежить не тільки від фізичних властивостей матеріалу, але також від форми електродів-контактів, які доторкаються до предмету. Якщо бульба знаходиться між двома електродами з тупими кінцями, то він створює опір понад 50 Ом, оскільки шкірка бульби не порушується. Опір бульби, на яку натискають два голчаті електроди, складає лише 20—30 Ом. В протилежність цьому опір грунтових грудок при тупих електродах менше ніж при голчатих. Для автоматичного відділення від грудок і каменів створений датчик, показаний на рис. 27, а. В металевому циліндрі 1 діаметром 25,4 мм, що є корпусом датчика, закріплено чотири трубки 2 з неелектропровідного матеріалу. На нижніх кінцях трубок змонтовано два тупі електроди 3 і два загострені електроди 4, які натискують на випробовуваний об'єкт (бульба або грудку) з постійним зусиллям, створюваним пружинами 9. При натиску електрода на бульбу або грудку трубка 2 відтісняє кульку 8, в результаті пружинний контакт 7 відходить від кільця 6, ізольованого від циліндра прокладкою 5.
|
Рис. 27. Електропневматичний пристрій для відділення бульб від грудок і каменів |
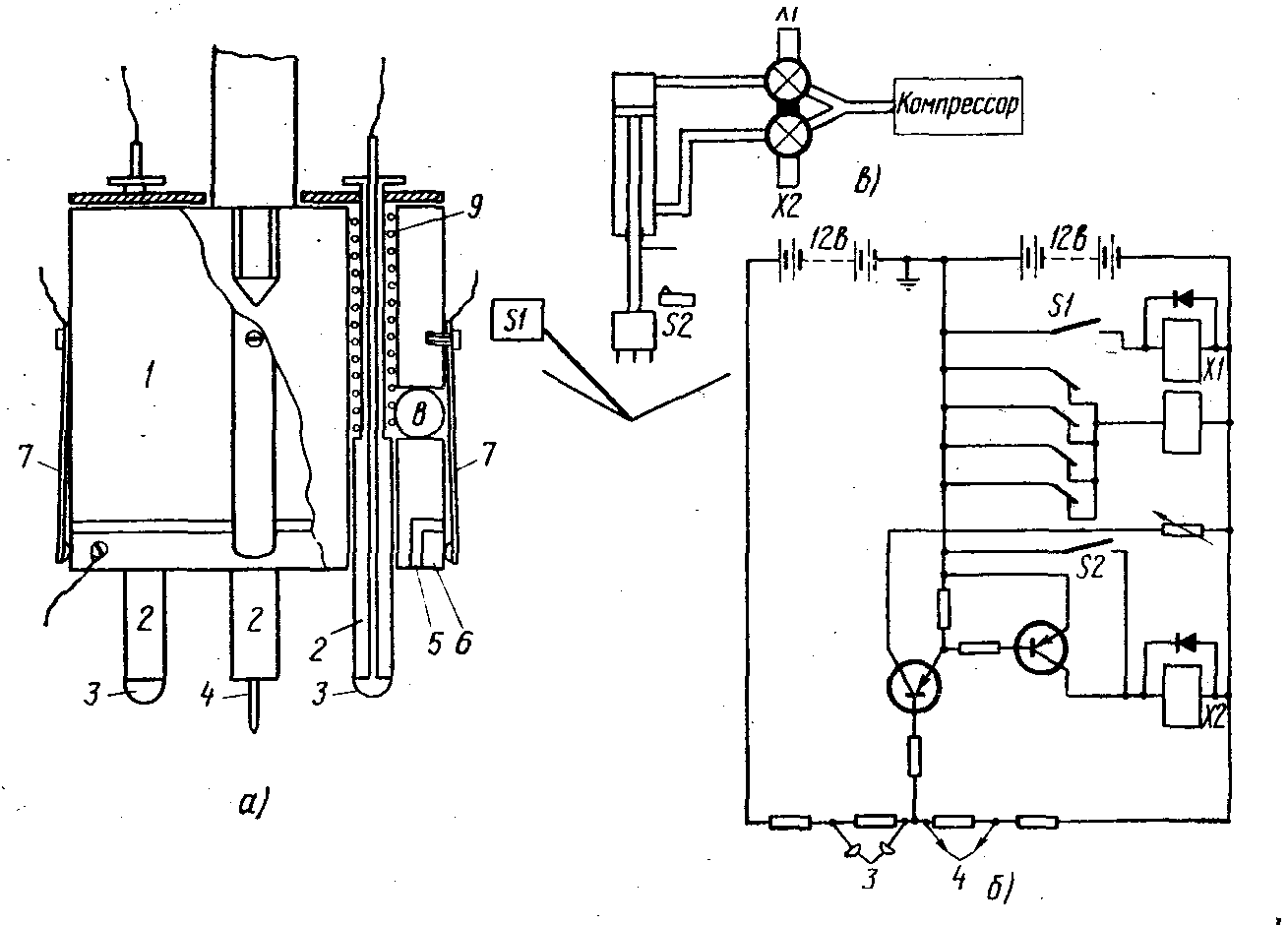
Поки хоча б один з електродів не увійде до зіткнення з бульбою або грудкою, циліндр буде сполучений з кільцем і електрична частина приладу не буде діяти.
Електрична схема пристрою (рис. 27, б) живиться постійним струмом від двох акумуляторних батарей напругою 12 В. Електроди шунтовані опорами, які запобігають появі сильних струмів в системі при випадковому зіткненні електродів з металевим предметом. Оцінка опору між тупими і загостреними електродами виробляється за принципом здвоєного потенціометра. Напрям струму, що поступає на напівпровідниковий тріод, залежить від співвідношення опорів між парами електродів. Якщо електроди стикаються з грунтовою грудкою, то опір між тупими електродами менше ніж між загостреними, внаслідок чого відбувається замикання тріода, тобто анодний струм припиняється. Якщо опір між загостреними електродами менше ніж опір між тупими електродами, напрям струму, що поступає на тріод, змінюється і сила анодного струму збільшується до значення, достатнього для включення електромагніту Х2, який управляє одним з клапанів пневмосистеми. Цей клапан може приводитися в дію за допомогою вимикача S2, працюючого незалежно від напівпровідникового тріода. Електромагніт X1, керуючий другим клапаном пневмосистеми, одержує струм через мікровимикач S1. Датчик з електродами встановлюють на штоку пневмоциліндра, що переміщається в напрямі, перпендикулярному до руху стрічки транспортера (рис. 27, в).
При зустрічі щупа мікровимикача S1 з бульбою або грудкою клапан, пов'язаний з цим вимикачем, впускає повітря, що нагнітається компресором, в дальню порожнину циліндра, унаслідок чого поршень здійснює виштовхуючий хід, а датчик зближується з предметом, затриманим щупом. Якщо цей предмет є бульбою, то у момент зіткнення електродів з його поверхнею електромагніт Х2 впускає повітря в протилежну порожнину циліндрів і датчик відходить від бульби, яка скидається із стрічки в кінці транспортера. Якщо включення циліндра викликано грудкою або каменем, то при зіткненні електродів тріод не пропускає струм до електромагніту Х2 і датчик продовжує рух, штовхаючи перед собою грудку або камінь. Зупинка штока з датчиком відбувається тільки при контакті упора, закріпленого на штоку, з мікровимикачем S2. Довжина додаткового ходу штока достатня для того, щоб скинути грудку або камінь убік з транспортерної стрічки.
Дослідження показують, що датчик відрізняє бульбу від грудки або каменя за дуже малий час (близько 0,001 с). З урахуванням часу спрацьовування реле тривалість одного визначення досягає 0,005 с. При середній довжині ходу штока 50 мм тривалість одного циклу роботи пристрою рівна 0,1 с. За 1 с пристрій може проінспектувати 10 предметів.
Основними причинами погрішностей при сепарації є наявність на бульбах великого шару налиплого грунту і горбистість бульб, яка перешкоджає доброму контакту електродів з їх поверхнею. Різані бульби мають надмірно низький опір і часто відкидаються в неправильному напрямі. Загострені електроди залишають на поверхні бульб наколювання діаметром і глибиною близько 0,5 мм.
Також вивчалася можливість використовування для розділення бульб і домішок відмінностей в діелектричних постійних. Принцип сепарації полягає в тому, що компоненти, що розділяються, проходять через місткість осцилятора вільних коливань. Унаслідок відмінності діелектричних постійних частота осцилятора вільних коливань міняється. Зміна частоти осцилятора коливань перетвориться в електричні сигнали, які після відповідної обробки і посилення подаються до механізму, що здійснює відділення бульб від домішок. Аналіз показує, що застосування цього способу може бути ефективним лише при відділенні від бульб сухих грунтових грудок, оскільки із збільшенням вогкості відмінність в діелектричних постійних бульб і грудок зменшується.
Запропоновані робочі органи, які використовують різницю в звукових імпульсах при ударі бульб і домішок з поверхнями.
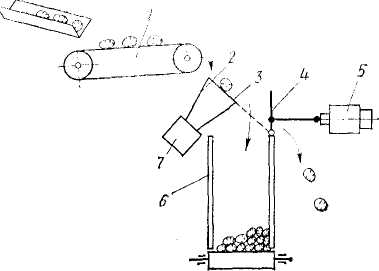
На рис. 28 схематично зображена установка для здійснення розділення компонентів по звукових імпульсах. Установка складається з транспортера 1, здійснюючого поштучну подачу; бункери 6; звукового індикатора 3 з мембраною, який служить для збудження звуку ударною дією компонентів суміші; звуковода 2 і реле 7, яке керує механізмом розділення компонентів за допомогою електромагніту 5 із заслінкою 4.
Бульби, що поштучно подаються, камені, грудки грунту і маточні бульби, при ударі об мембрану порушують звук різної сили, який перетворюється реле 7 в сигнали, що передаються електромагніту 5, який керує заслінкою 4.
|
Рис. 28. Пристрій для відділення бульб картоплі від домішок за звуковими імпульсами
|
Був створений робочий орган, що використовує акустичний метод відділення бульб картоплі від домішок. Віддільник з використанням акустичного методу розпізнавання предметів складається з наступних вузлів: подаючого органу, пристрою для створення і прийому шуму, пристрою для перетворення звукового імпульсу управління, пристрою для оцінки імпульсу управління і відділення домішок, збірних бункерів.
Установка працює таким чином (рис. 29). З подаючого транспортера 1 окремі предмети поступають по лотку 2 на акустичну пластинку 3. Так вони створюють акустичний імпульс, сприйманий мікрофоном 4.
|
Рис. 29 . Схема пристрою відділення бульб картоплі від домішок акустичним методом |
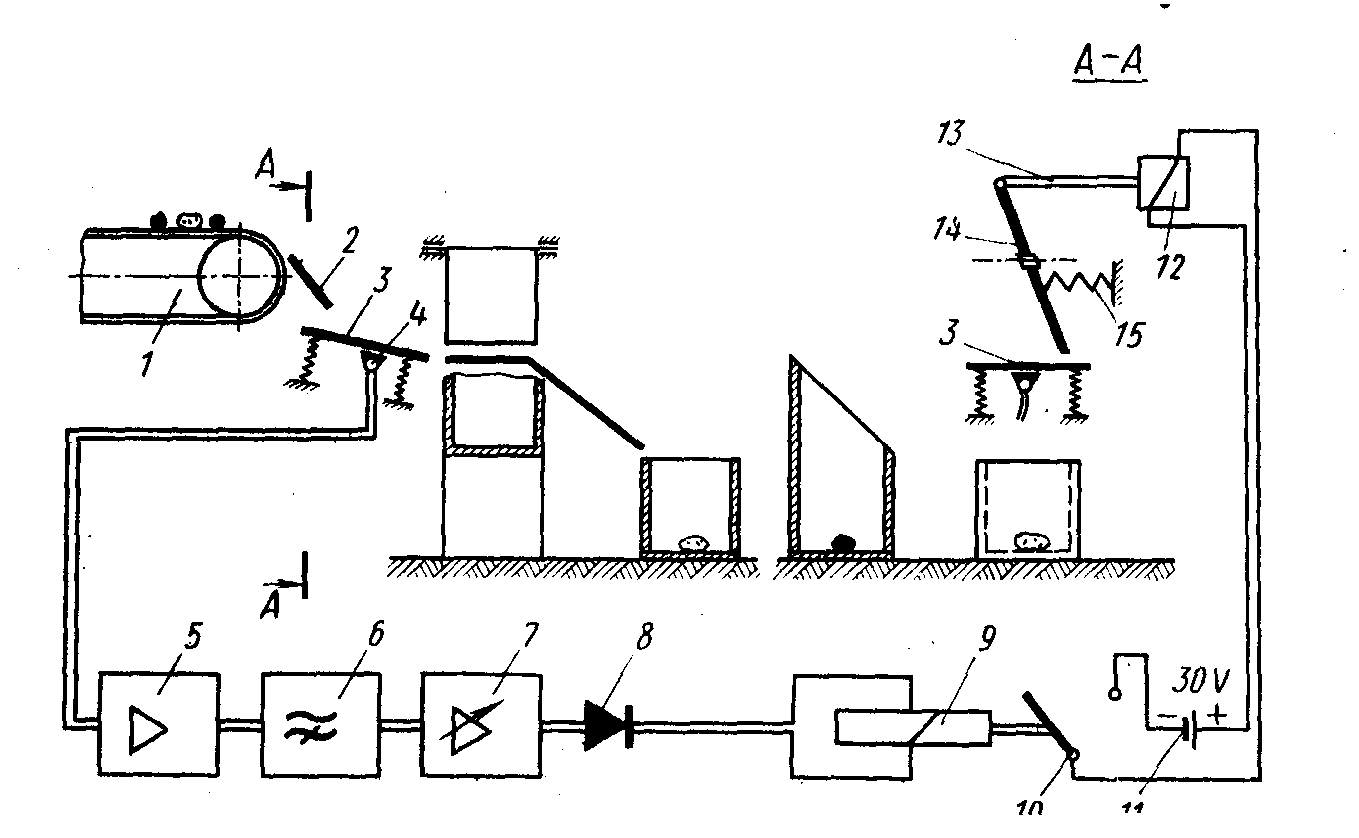
Акустичний імпульс через попередній підсилювач 5, частотний фільтр 6, який служить для поглинання низьких акустичних частот імпульсу бульби і пропускання акустичної частоти домішок, регульований додатковий підсилювач 7 і випрямляч 8 подається на реле управління 9. За допомогою реле 9 включається пристрій, який здійснює відділення домішок.
В схемі виконавчого механізму, працюючого від реле управління 9, приводиться в дію замикаючий контакт 10. Імпульс стороннього предмета, прийнятий мікрофоном 4, викликає збудження магніта 12, який через тягу 13 відхиляє розподільний клапан 14 і відділяє домішки перпендикулярно до напряму потоку картоплі. Після загасання акустичного імпульсу, тобто після відхилення реле управління 9, пружина 15 знову переводить розподільний клапан 14 в початкове положення. Вдосконалена конструкція клапана допускає швидкість подачі восьми окремих предметів в секунду.
Оптичний спосіб заснований на взаємодії електромагнітних хвиль ультрафіолетової, видимої і інфрачервоної областей спектру з об'єктами контролю.
В результаті досліджень визначена найбільш інформативна ділянка інфрачервоної області спектрів віддзеркалення в діапазоні 0,8—1,3 мкм (рис. 30). Запропонована робоча схема процесу сепарації (рис. 31), що передбачає суцільну рядну подачу об'єктів картопляного вороха на похилу поверхню, поступально-обертальний рух об'єктів в результаті їх скочування з неї, синхронно-надмірний огляд їх у момент сходу з похилої поверхні, розпізнавання на двох ділянках спектру 0,91 і 0,98 мкм за допомогою реверсивного алгоритму, розділення виконавчим механізмом у момент вільного падіння.¦
|
|
Рис. 30.
Характеристики
коефіцієнта
|
Рис. 31. Схема оптико-механічного віддільника: 1 _ транспортер подачі об'єктів; 2 — похила поверхня; 3 — зона контролю; 4 —виконавчий механізм; 5 — транспортер для здорових бульб; 6 — транспортер для твердих домішок і загнилих бульб картоплі; 7 — оптико-механічний перетворювач; 8 — блок розпізнавання; 9 — випромінювач світла |
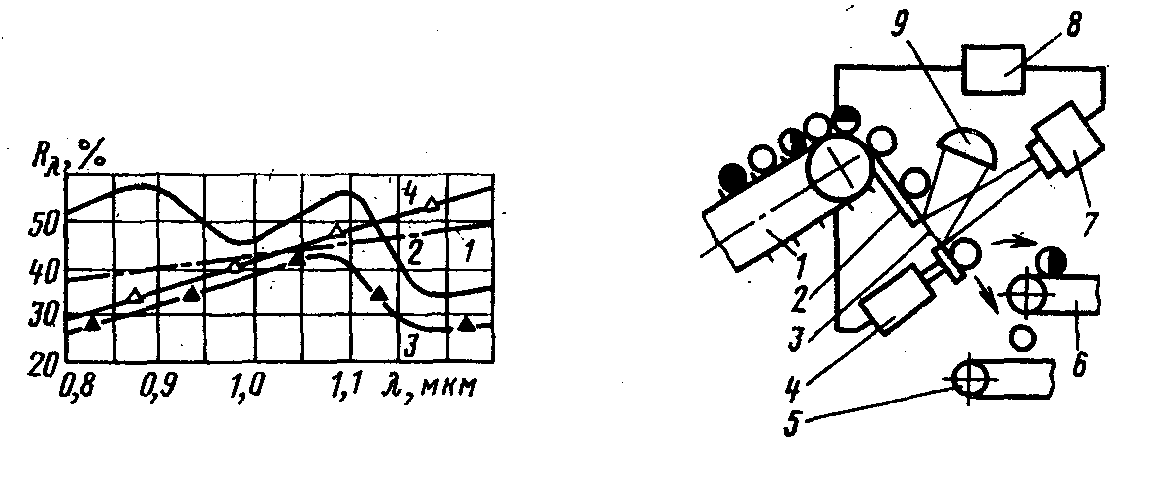
Робочі параметри установки: ширина зони контролю 120 мм, відстань від зони контролю до вхідного отвору об'єктиву оптико-механічної системи 650 мм, смуга пропускання світлофільтрів 60 нм, потужність джерел випромінювання 120 Вт. Продуктивність установки 3 т/год. Недоліком цього способу ; є зниження повноти сепарування при забрудненні поверхні бульб грунтом.