

Системи автоматичного проріджування і обробітку рослин
У системах сільськогосподарської автоматики знаходять застосування безконтактні радіотехнічні й акустичні пристрої, що використовуються там, де не можна здійснити безпосереднє: зіткнення, наприклад, для виявлення рослий у початковій стадії їхнього розвитку.
На рис.15,а показаний безконтактний радіотехнічний пристрій для виявлення рослин. Сприймаюча частина являє собою транзисторний автогенератор метрових хвиль із коливальною системою, поміщений в екран з вирізом у стінці, звернений убік набігаючого рядка рослин і розташований поблизу поверхні грунту під кутом до осі рядка.
При наявності рослин поблизу коливальної системи автогенератора змінюється його комплексний опір, що викликає додаткові утрати високочастотної енергії, яка доповнюється джерелом живлення. Унаслідок цих змін внутрішній опір автогенератора збільшується, напруга в точках 2 і 5 росте, що приводить до зростання величини струму через вимірювальний стабілітрон 4. Струм, що протікає через стабілітрон 4, відкриває його і викликає спрацьовування виконавчого реле 3.
У якості чуттєвого елементу високочастотного генератора може бути використаний ємнісний чи антенний чуттєвий елемент.
Інший тип
високочастотного пристрою для виявлення
рослин (рис.15,б)
містить ультрависокочастотний генератор
1
з резонансною лінією
![]() у якості
коливального контуру. До петлі зв'язку
у якості
коливального контуру. До петлі зв'язку
![]() підключений чуттєвий елемент (електрод)
2. Підбором
резистора
підключений чуттєвий елемент (електрод)
2. Підбором
резистора
![]() і величини
анодної напруги
і величини
анодної напруги
![]() автогенератор скеровується в недонапружений
режим, при якому сітковий струм лампи
автогенератор скеровується в недонапружений
режим, при якому сітковий струм лампи
![]() близький до
нуля. Дотик електрода 2
до рослини
3
приводить
до різкої зміни опору навантаження
генератора. Режим роботи змінюється на
перенапружений, що супроводжуеться
стрибкоподібним збільшенням струму
лампи, що через резистор
близький до
нуля. Дотик електрода 2
до рослини
3
приводить
до різкої зміни опору навантаження
генератора. Режим роботи змінюється на
перенапружений, що супроводжуеться
стрибкоподібним збільшенням струму
лампи, що через резистор
![]() надходить
у блок обробки сигналів 4
і на вхід
виконавчого пристрою. Підбором
резистора
генератор
скеровується таким чином, щоб пристрій
реагував на середовище з визначеною
провідністю.
надходить
у блок обробки сигналів 4
і на вхід
виконавчого пристрою. Підбором
резистора
генератор
скеровується таким чином, щоб пристрій
реагував на середовище з визначеною
провідністю.
Рис.15.
Радіотехнічні й акустичні датчики: а,
б -
датчики для виявлення рослин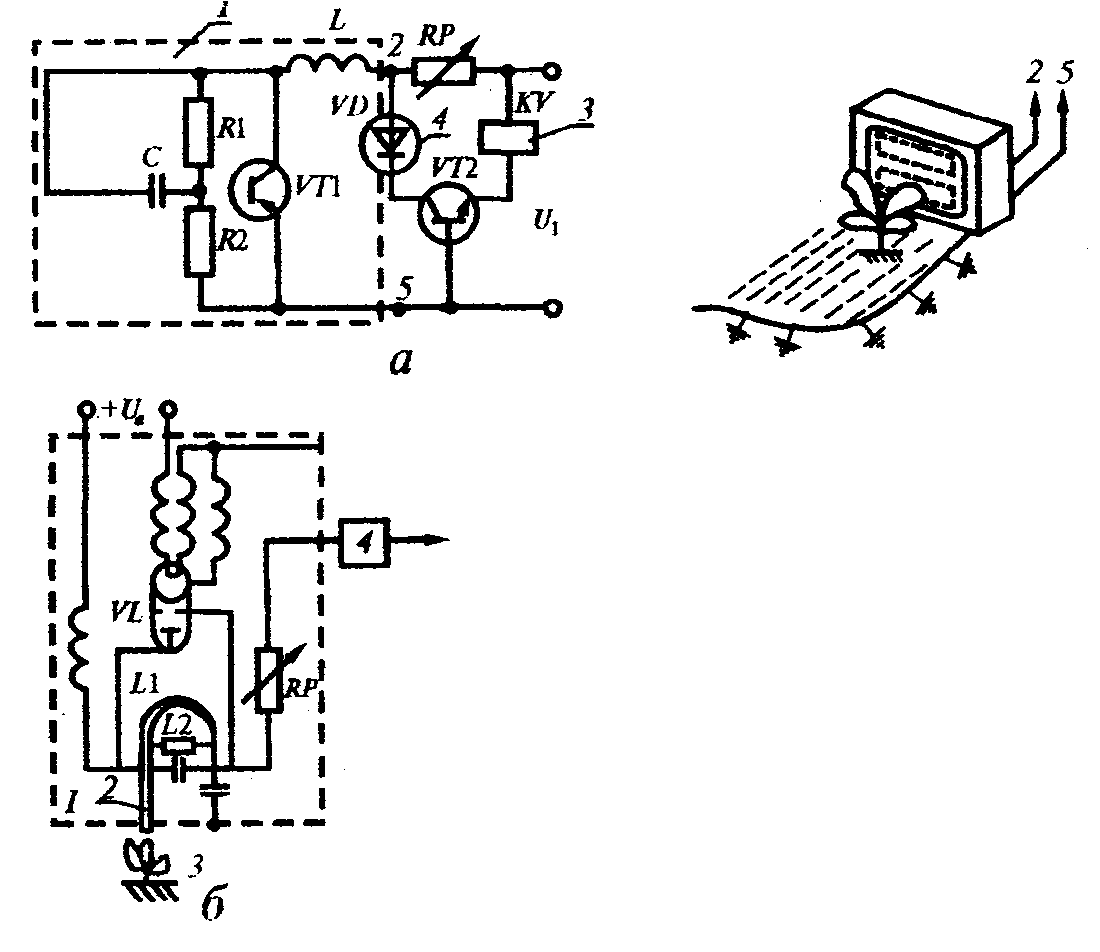
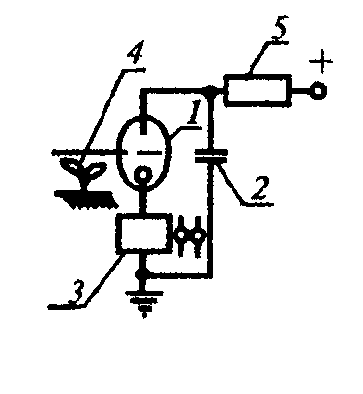
На рис. 16. представлений тиратронно-механічний перетворювач для виявлення рослин. У вихідному стані тиратрон 1 погашений, а конденсатор 2 заряджений до напруги джерела живлення. У випадку дотику електродів 4 до рослини тиратрон 1 запалюється і спрацьовує електромагнітне реле З, що є джерелом інформації про наявність рослин під чуттєвим елементом. У момент включення тиратрона 1 конденсатор 2 розряджається через нього і котушку реле 3 до рівня напруги загасання. Тиратрон 1 гасне, реле З виключається, а конденсатор 2 заряджається через резистор 5 до напруги джерела і схема повертається у вихідний стан.
|
Рис. 16. Тиратронно-механічний перетворювач для виявлення рослин |
Для автоматизації проріджування найбільш ефективні фотоелектричні датчики, оскільки вони здатні знаходити рослини навіть в ранній фазі розвитку («вилочки»), коли ряди сходів практично вільні від бур'янів.
Сама оптимальна програма проріджування — з корекцією. Вона зменшує коефіцієнт варіації числа залишених рослин і інтервал між ними. На базі фотоелектричного датчика розроблена САУ, яка використовує механічні робочі органи з гідроприводом.
Дослідження відбивних властивостей і колірних характеристик рослин і грунтів дозволили встановити, що найбільш інформативні дві області хвиль відзеркаленої променевої енергії: близькі до 680 і перевищуючі 800 нм; тому в основу алгоритму розпізнавання встановлений біхроматичний принцип.
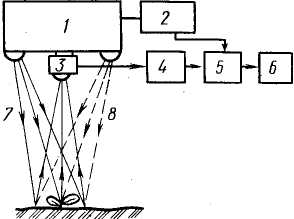
Контрастність фотоелектричного датчика (рис. 17) достатня, щоб знайти рослину з площею листя 1,5 см2. Поперечний розмір поля зору датчика задається рівним середній амплітуді відхилення проріджуючої секції від осі ряду, а поздовжній— середній довжині горизонтальної проекції рослин.
|
Рис. 17. Блок-схема фотоелектричного датчика виявлення рослин: 1 — джерело модульованого проміння; 2 — задавач напруги опорної фази; 3 — фотоприймач; 4, 6 — підсилювачі напруги; 5 — індикатор фази; 7, 8 —різно-спектральні промені. |
Сама краща схема проріджування та, при якій після заданого вирізу залишається перша рослина. Режим роботи проріджувача по цій схемі обумовив конструктивне оформлення САУ (рис. 18).
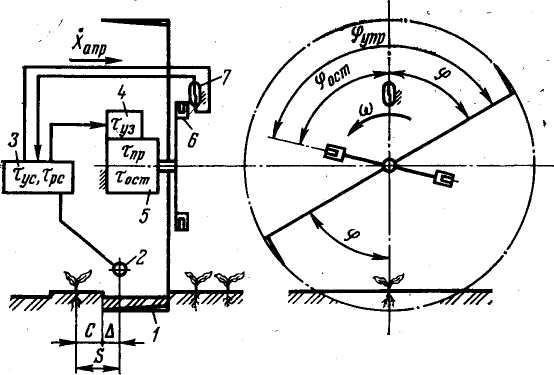
Рис. 18.
Функціональна схема САУ робочими
органами проріджувача ( |
Діє вона так. Управляючий сигнал (у вигляді слабого електричного імпульсу) від рослини, знайденої вимірювальним перетворювачем 2, поступає на вхід підсилювально-перетврювального пристрою 3, потім на управляючий елемент 4, який являє собою електрогідравлічний клапан. Клапан відкриває надходження масла до приводного гідромотора 5, на валу якого закріплені ножі 1 і магніти 6. Останні впливають в потрібні моменти на магнітокеруючі контакти переривника 7, призначеного для зупинки валу гідромотора і повернення електричної схеми в початковий стан після відпрацювання системою управляючого сигналу.