

Застосування на сільськогосподарських машинах автоматичних водіїв
Розглянемо ряд методів орієнтації машинотракторного агрегату, які застосовують при автоматичному водінні. Найбільш поширеним є метод копіювання. При цьому методі машина або машинотракторний агрегат копіює лінію залишену ним при попередньому проході – це може бути борозна, маркерна лінія утворена спеціальними слідоутворюючими пристроями, а також межа хлібостою. Автоматичні водії, принцип дії яких ґрунтується на методі копіювання, весь час удосконалюються. Розглянемо принципову схему системи автоматичного водіння трактора, побудовану на методі копіювання.
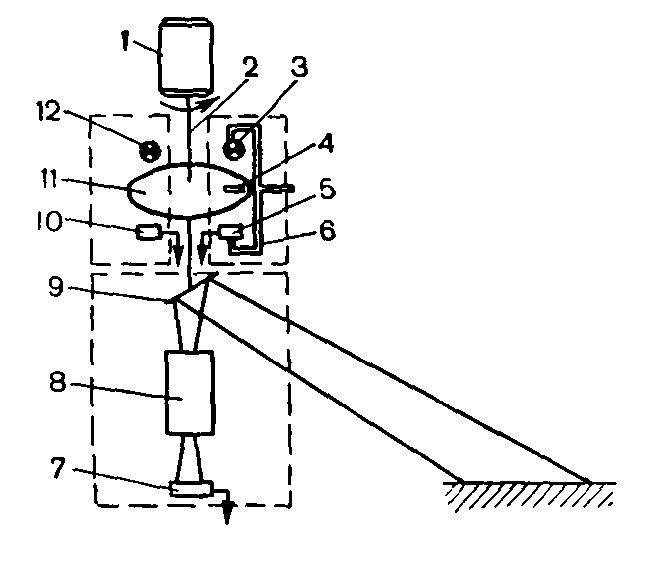
Рис. 1. Спрощена принципова схема системи автоматичного водіння трактора (метод копіювання): 1 – базова лінія оброблюваного грунту; 2 – копір; 3 – порівнювальний елемент; 4 – електромагнітні перетворювачі; 5 – гідравлічний підсилювач; 6 – гідроциліндр; 7 – рейка; 8 – рульова трапеція; 9 – трактор; Y – відхилення копіру
Автоматична система працює наступним чином. Сприймаючий елемент фіксує відхилення копіра, яке спостерігається при відхиленні руху трактора від борозни. Якщо відхилення буде більшим за зону нечутливості порівняльного елемента, то електричний сигнал надходить на елемент управління, який складається з двох електромагнітів та гідравлічного підсилювача 5. Елемент управління з’ясовує в який бік відбулось відхилення та визначає його величину. Залежно від напрямку відхилення включається той чи інший електромагніт, який пересуває поршні гідро підсилювача, а величина відхилення визначає тривалість утримання поршнів у цьому положенні. При відхиленні поршнів масло потрапляє до виконавчого елемента – гідроциліндра, за допомогою якого переміщається зубчата рейка 7, за допомогою якої рульова трапеція 8 змінює положення перехідних ведучих коліс. Вони повертаються до тих пір, поки копір не займе нейтральне положення. Такі системи можна використовувати на різних тракторах, але при виконанні однієї або невеликої кількості операцій. Наприклад, систему автоматичного водіння, яка використовує борозну попереднього проходу, як напрямну траєкторію, можна застосовувати лише при оранці. Крім того такі системи набувають помилок попередніх проходів. Також вказаний метод не дозволяє автоматично вести агрегат на поворотній полосі, тому необхідна присутність механізатора при виконанні поворотів в кінці гону.
Розроблені пристрої автоматизації водіння тракторів К-700 і К-701 з системою немеханічного безконтактного копіювання направляючої траєкторії за рахунок різниці коефіцієнтів віддзеркалення зораної і незораної ділянок поля по обидві сторони від борозни, що представляє собою світлконтрастну направляючу траєкторію.
У зв'язку з тим, що коефіцієнти віддзеркалення зораної і незораної ділянок поля різні, відображені від них світлові потоки також відрізняються один від одного. Використовування цих світлових потоків можливо, якщо спроектувати їх на фоточутливі елементи, що перетворюють світлову енергію в електричну напругу. Якщо на фотоелемент спроектувати шляхом сканування світлові потоки, відображені від поверхонь (ділянок поля), що лежать по обидві сторони межі розділу, то величина електричного сигналу буде пропорційна різниці світлових потоків. Ця властивість лягла в основу створення фотооптичного датчика, що виконує роль копіра направляючої траєкторії. На рис. 2 подана його схема.
|
Рис.2. |
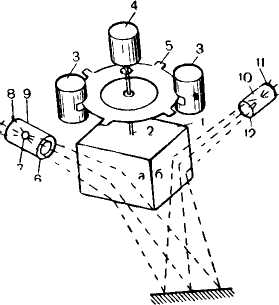
На валу 2 електродвигуни 1 закріплений диск 11 з прорізом 4 і оглядове дзеркало 9, нахилене до горизонту таким чином, що світловий потік, відображений від поверхні поля, заломлюючись на ньому, падає у вертикально розташований об'єктив 8, який проектує його на сигнальні фотоелементи 7, розташовані у фокальній площині об'єктиву.
При обертанні електродвигуна оглядове дзеркало 9 здійснює кругове сканування поверхні поля і в той момент, коли межа розділу зораної і незораної ділянок проектується на сигнальні фотоелементи 7, в ланцюзі останніх виникає стрибкоподібна зміна струму — сигнальний імпульс, який використовується для визначення положення агрегату щодо направляючої траєкторії. Здійснюється це порівнянням моменту появи сигнального імпульсу з моментом появи маркерного імпульсу, який формують встановлений на корпусі 6 датчик маркерного фотоелемента 5 і лампи підсвічування 3, між якими обертається диск 11 з прорізом 4. При проходженні прорізу між лампою 3 і маркерним фотоелементом 5 в останньому виникає маркерний імпульс, момент появи якого пов'язаний з напрямом керованих коліс трактора, оскільки датчик встановлюється на валу сошки рульового управління і повертається разом з колесами.
Датчик встановлюється на машині так, щоб при правильному її положенні щодо направляючої траєкторії сигнальний і маркерний імпульси виникали одночасно. Порушення цієї одночасності свідчить про відхилення агрегату від направляючої траєкторії. Черговість появи імпульсів визначається напрямом, а часовий інтервал між ними — величиною відхилення агрегату від направляючої траєкторії.
Щоб використовувати фотооптичний датчик для роботи в умовах недостатньої освітленості, необхідно доповнити його штучним світловим випромінювачем. Такий датчик обертає сфокусований світловий промінь синхронно з скануючим пристроєм. Таким чином, промінь в кожний момент часу потрапляє саме на ту ділянку грунту, яка знаходиться в (поле зору датчика і проектується на фотоелементи. Пристрій такого датчика можна проілюструвати за допомогою рис. 3.
|
Рис. 3. Фотооптичний датчик з штучним освітлювачем: 1 — дзеркало-ротор; 2 — вал електродвигуна; 3 — індукційний датчик; 4 — електродвигун; 5 — диск з виступами; 6, 12 — об'єктиви; 7 — джерело світла; 8 — електричний відбивач; 9 — корпус випромінювача; 10 — корпус фотоприймача; 11 — фотоелемент
|
Принцип дії датчика наступний. Електродвигун 4 приводить в обертання дзеркало-ротор 1 і диск з виступами 5. Обертанням ротора досягається одночасне освітлення і сканування ділянки поля, проектованого на приймальний фотоелемент датчика. При проходженні виступу диска крізь щілини індукційного датчика 3 з'являється імпульсний сигнал, використовуваний в якості опорного. Для створення зони нечутливості датчик забезпечений двома маркерними пристроями. Якщо сигнал приймального фотоелемента з'являється між маркерними сигналами, то положення агрегату щодо направляючої траєкторії вважається за правильне. Випередження або відставання сигналу приймального фотоелемента щодо обох маркерних сигналів свідчить про відхилення агрегату від направляючої траєкторії в ту або іншу сторону.
При використовуванні в САВ фотодатчика з двома маркерними елементами регулювання зони нечутливості виробляється за рахунок їх взаємного зміщення. Виконавчими механізмами повороту служать електромеханічні і електрогідравлічні приводи.
Система забезпечує стійкий аперіодичний рух тракторного агрегату на оранці зябу при швидкості до 10 км/год. Вона може використовуватися на суцільній культивації і при застосуванні спеціальних маркерних пристроїв на інших технологічних операціях рільництва. Вартість її невелика. Підготовка поля здійснюється швидко і з мінімальними витратами. Збільшення винесення точки сканування направляючої траєкторії дозволяє уникнути накопичення її викривлень із збільшенням числа проходів, відбувається згладжування випадкових викривлень.
В умовах слабої освітленості система працює стійко, зниження якості незначне. Працездатність її погіршується при яскравому бічному освітленні і під час сутінків при освітленості до 2000 люкс.
До пристроїв, що копіюють залежну направляючу траєкторію, відносять і систему водіння трактора по тросу, що здійснює копіювання залежної направляючої траєкторії індукційним способом. Ділянка, на якій працює трактор, обкантовують кабелем, по якому пропускають струм. На тракторі встановлюють індукційний датчик, закріплений на стрілі. Він реагує на електромагнітне поле струму, що протікає по кабелю, і виробляє сигнал похибки, що використовується для управління курсом трактора. На тракторі встановлено пристрій, який захоплює кабель і укладає його позаду трактора паралельно первинному положенню. В цей час кабель проходить через обмотки трансформатора, внаслідок чого в кабелі утворюється змінний струм.
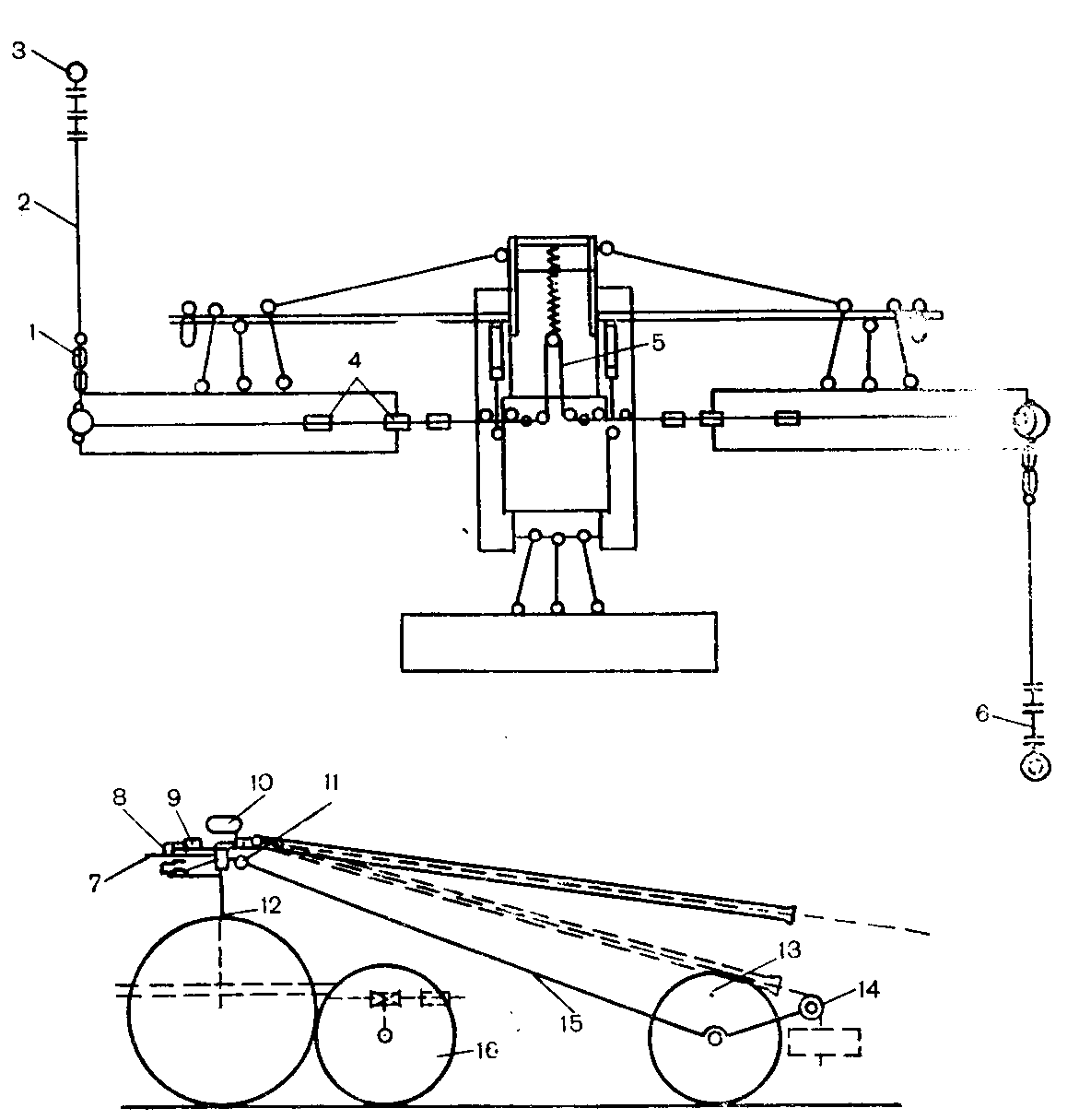
На рис. 4 зображений гусеничний трактор, обладнаний механічною системою водіння по тросу.
Трос 2, зафіксований на кінцях гону за допомогою вантажів-якорів 3, проходить усередині чутливого елемента — трубки 1. Трубка встановлена шарнірно на контактній площадці 9, яка зв'язана з рамою агрегату і повертається навкруги вертикальної осі 12. При повороті трубки і поворотної площадки, викликаному відхиленням трактора від прямолінійного напряму, кулачок 10 замикає контакти 8 вимикачів, які включають поворотний механізм трактора. Хвостовик 7 зв'язаний жорстким зворотним зв'язком з механізмом повороту. Натягнення троса регулюється компенсатором 5. При підході агрегату до кінця робочого гону шайби 6 взаємодіють з вимикачами 4, які подають сигнал на зменшення оборотів двигуна, підйом навіски і включення поворотного пристрою, що переміщає при розвороті агрегату вантаж-якір 3 на подвоєну ширину захвату. Кронштейн 15 поворотного пристрою має одну точку опори на вертикальному валу контактної площадки і може повертатися на 180о, а другу—на опорному колесі 13. На осі колеса закріплений блок 14, по якому пересувається трос. Після розвороту кронштейни 15 і трубки 1 займуть положення зворотнє, показаному на рис. 8. Радіус повороту агрегату рівний половині ширини захвату. Для стабілізації радіусу повороту агрегат обладнаний колесом 16, встановленим на межі захвату. При перекочуванні колеса по полю вперед подається сигнал на зменшення радіусу повороту і навпаки. Таким чином, поворот агрегату відбувається навкруги точки копіювання коліс.
Система водіння по тросу дозволяє згладжувати дрібні (до декількох метрів) викривлення траєкторії руху агрегату. Проте її застосування утрудняє громіздкість встановлюваних на тракторі механічних пристроїв для змотування і розмотування троса, прокладка базової лінії для подальшого проходу, перестановка «якорів» на кінцях гону. Ці пристрої значно виступають за габарити трактора і погіршують його маневреність.
|
Рис. 4. Система автоматичного водіння трактора по тросу: 1 — чутливий елемент-трубка; 2 — трос; 3 — вантаж-якір; 4 — вимикачі; 5 — компенсатор натяжного троса; 6 — шайби; 7 — хвостовик; 8 — контакти вимикачів; 9 — контактна площадка; 10 — кулачок; 11 — верхня точка опори кронштейна; 12 — вісь повороту чутливого елемента; 13 — опорне кільце; 14 — блок; 15 — кронштейн; 16 — колесо-стабілізатор радіусу повороту
|
Останніми роками аналізується можливість використовування радіонавігаційних систем (РНС) для водіння агрегату, коли автоводіння виконується шляхом визначення його поточних координат, порівняння їх із заданою програмою і вироблення сигналу відхилення траєкторії від заданої. При цьому орієнтиром служать дві навігаційні точки на краях поля зі встановленими на них ретрансляторами (рис. 5). Місцеположення МТА в кожний момент часу (істинну траєкторію) визначають по двох відстанях R1, R2, виміряним від вибраної точки на МТА (фазового центру антени ведучої станції) до двох навігаційних точок на стаціонарних пунктах (ведених станціях), а також по наперед зміряній базовій відстані між навігаційними точками.
РНС для автоводіння МТА складається з підсистем, що рознесені в просторі: прийомопередавача 1, розташованого на МТА; прийомопередавача, розміщеного на одному із стаціонарних пунктів 2, що бере участь спільно з прийомопередавачем 1 у вимірюванні відстані R1; прийомопередавача, встановленого на іншому стаціонарному пункті 3, що бере участь спільно з прийомопередавачем 1 у вимірюванні відстані R2. Іншими словами, в отриманні інформації про місцеположення МТА беруть участь два радіодалекоміри, кожний з яких складається із ведучої (на борту МТА) і веденої (па стаціонарному пункті) станцій.
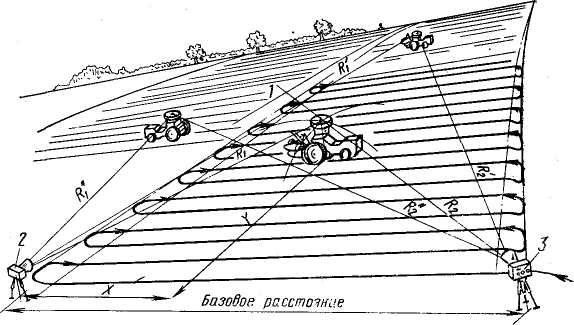
Рис. 5. Схема автоводіння МТА за допомогою радіонавігаційної системи
Інформація про відстані R1 і R2 поступає па вхід пристрою обчислення планових координат. Обчислені координати подаються в блок порівняння, де зберігається інформація про задану програму руху. Один з результатів порівняння— помилка витримки траєкторії. Отриманий сигнал розузгодження після відповідної оптимальній фильтрації поступає на регулятор і виконавчі механізми системи автоводіння.
Основа РНС — лаговый радіодалекомір, що включає дві прийомопередаючі станції, одна з яких розташована на стаціонарному пункті, інша — на рухомому об'єкті (МТА). В результаті двох послідовних відліків визначається приріст відстані. Отримані дані зумовлюють лінію положення МТА — коло (або дугу, кола).
Способи і схеми автоматизації руху агрегатів на поворотній смузі можна умовно розділити на наступні: І — з внутрішньою (автономній) програмою, II — з дистанційним управлінням, III — з прив'язкою до місцевості. У разі І програма впливає на рульове управління трактора за часом за допомогою реле, перфострічки або прочитуваної фотоелементами карти поля, на яку нанесені траєкторії поворотів, У варіанті II управляє агрегатом тракторист-оператор по радіо, кабелю або однодротяній лінії зв'язку, спостерігаючи за ним візуально або по телебаченню; можливо також дистанційне автоматичне стежаче керування поворотом веденого агрегату з ведучого (за допомогою жорстких кінематичних ланок, троса або неконтактними способами). У разі III прив'язка до місцевості здійснюється за допомогою різних координатомірних пристроїв, починаючи з кола, що погойдується, або колеса в центрі повороту і кінчаючи дистанційним вимірюванням координат об'єкту, зіставленням інформації з програмою повороту, закладеною в ЕОМ, і телекеруванням; по індукційному дроту, розкладеному на поворотній смузі або закладеному в спеціально нарізані борозни; можливо застосування програм управління по дорозі і куту повороту.
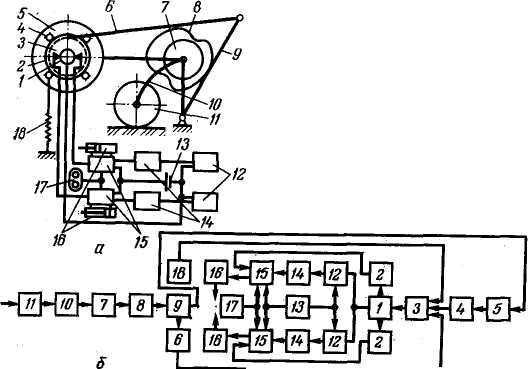
Рис. 6. Схеми САУ поворотом з гіроскопом:
а — принципова; б — функціональна; 1,2 — контакти; 3 — контактний диск; 4 — підшипники; 5 — гіронапівкомпас; 6 — нитка; 7 — редуктор; 8 — програмний диск; 9 — важіль; 10 — гнучкий вал; 11 — шляховимірювач; 12 — соленоїди; 13 — акумуляторна батарея; 14 — імпульсні коректори; 15 — підсилювачі; 16 — гідроциліндри поворотів; 17 — масляний насос; 18 — пружина.
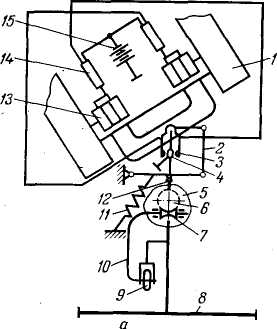
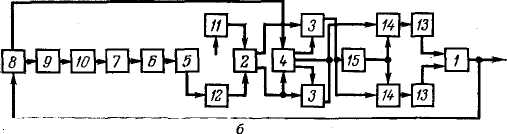
Рис. 7. Схеми САУ поворотом з механічним перетворювачем курсу:
а — принципова; б — функціональна; / — трактор; 2 — шарнірна тяга; . 3, 4 — контакти; 5 — програмний диск; 6,7 — редуктори; У — ведена ланка; 9 — шляховимірювачь; 10 — гнучкий вал; 11 — пружина; 12 — ролик; 13 — гальма; 14 — електрогідравлічний підсилювач; 15 — акумуляторна батарея
Типізація способів або схем руху агрегату, здавалося б, полегшує програмування поворотів. Проте вже при такому способі, як беспетлевой човниковий, склад деяких агрегатів потрібно змінювати. (Наприклад, орний агрегат в цьому випадку можна складати тільки з оборотним плугом або з клавішними плугами.)
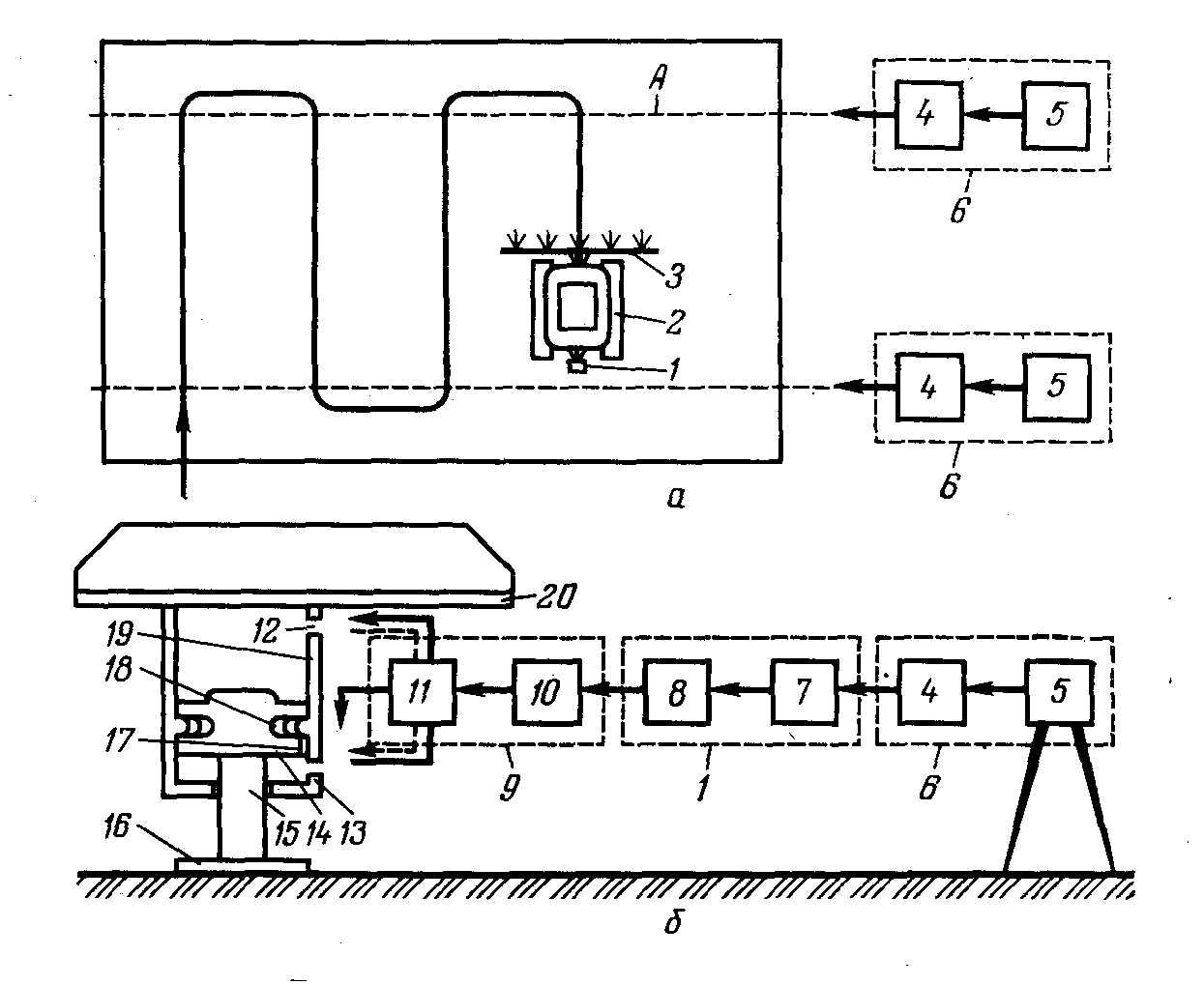
Змінені можуть бути не тільки вид машини, але і транспортний засіб, як це відбувається, наприклад, при введенні П-подібної схеми руху: агрегат повинен перетворитися на мобільний робот (мобот) 2 (рис. 8, а, б), що складається з рами 20 і сільськогосподарської машини 3 з робочими органами (наприклад, розпилювач отрутохімікатів). Контрольну лінію А, вказуючу кінець гону, утворює розміщений зовні загінки задаючий пристрій 6, який програмує поворот. Він складається з оптичного квантового генератора 5 і скануючого механізму 4.
|
Рис. 8. Схеми керування моботом: а – рухом, б .- поворотом |
|
Рис. 9. Стадії повороту мобота |

На моботі розміщений виконавчий механізм 1 прочитування програми, що складається з об'єктиву 7 і фотоелектронного помножувача 8; підсилювально-перетворювальний пристрій 9, в який входять електрогідравлічний 10 і гидромеханічний 11 золотникові розподільники; механізм 13 повороту, що є гідроциліндром з поршнем 14 і штоком 15. Шток 15 на нижньому кінці має опорну п'яту 16, а на верхньому кінці — поршень 14 з вертикальними 17 і горизонтальними 18 проточками у вигляді лопаток, на які попадає (під тиском) масло з перепускних фігурних отворів 19, виконаних в корпусі гідроциліндра 13. В гідроциліндрі передбачені також впускні і випускні канали 12, послідовно сполучені з підсилювально-перетворювальним пристроєм 9. Система забезпечує П-подібну схему руху мобота в загінці і на поворотній смузі по алгоритму, що складається з десяти стадій (рис. 8): після закінчення першого гону і перетину контрольної лінії мобот 1 зупиняється (І); шток поршня йде вниз, піднімаючи мобот (II); потім агрегат розвертається на 90о (III); шток піднімається, опускаючи мобот (IV), який перемістившись на ширину захвату (V), зупиняється (VI). Дальше слідує другий підйом (VII) і розворот мобота ще на 90о (VIII), опускання (IX) і рух його на наступному гоні (X).