

3 Вибір теми курсового проекту
Тематика курсових проектів із дисципліни “Мікропроцесорні пристрої” містить окремі задачі, на прикладі яких студенти набувають практичних навичок розробки мікропроцесорних систем.
Теми курсових проектів закріплюються за студентами викладачем. За узгодженням із керівником, студент може запропонувати для виконання курсового проекту власну тему, яка не увійшла до запропонованого переліку, а також дещо змінити її назву, обґрунтувавши доцільність.
Тема курсового проекту має відповідати творчим можливостям автора, як із точки зору вибору певної задачі, так і характеру роботи. Після цього керівник видає студенту завдання на виконання курсового проекту. У завданні складається календарний план виконання курсового проекту за розділами, який в обов’язковому порядку узгоджується з керівником (Додаток В).
3.1 Вимоги до змістовної частини проекту
Загальною тематикою курсових проектів є проектування мікропроцесорних систем (МПС), які керують певними технологічними процесами, відслідковують процеси, які проходять в інших системах, повідомляють користувача про їх перебіг або результат. Деякі варіанти передбачають проектування МПС, які формують процеси (сиґнали), а також виконують обчислення визначених величин.
Першим кроком до виконання проекту повинно стати чітке усвідомлення суті завдання: вихідних даних, кінцевого результату, який буде отриманий, та обмежень або вимог, які накладаються технічним завданням.
Після цього потрібно скласти функціональну схему системи, що містить усі необхідні для реалізації завдання блоки, і будується на основі певної архітектури мікропроцесорної системи. Найбільш типова функціональна схема мікропроцесорної системи з трьохшинною архітектурою зображена на рис. 1.
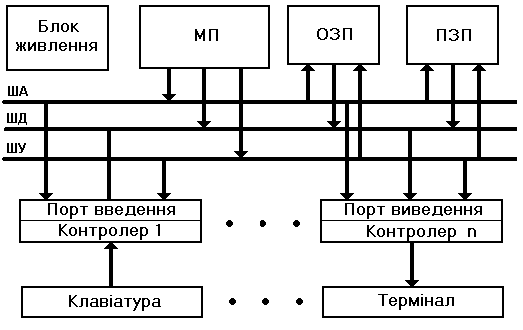
Рис. 1 - Функціональна схема мікропроцесорної системи
У її складі знаходяться наступні умовні блоки:
МП – мікропроцесор;
ПЗП – постійний запам’ятовуючий пристрій;
ОЗП – оперативний запам’ятовуючий пристрій.
Усі блоки пов’язані між собою трьома системними шинами: ША – шина адреси, ШД – шина даних та ШК – шина керування.
Залежно від варіанту функціональна схема може змінюватися з додаванням або виключенням окремих блоків.
3.2 Варіанти завдань
Варіанти 1-10
Спроектувати комп’ютеризовану систему управління приводом електродвигуна, охопленого зворотнім зв’язком за швидкістю або розташуванням.
№ вар. |
Тип привода |
Ревер./ неревер. привод |
Діапазон вхідної напруги, В |
Тип датчика зворотнього зв’язку |
Діапазон напруги датчика зворотн. зв’язку, В |
Похибка перетворення зворотного зв’язку, % |
Алгоритм реґулювання |
1 |
Двигун постійного струму (ШІМ) |
Реверсивний |
|
Тахоґенератор |
-5...+5 |
3 |
П– реґулювання |
2 |
Асинхронний двигун (ШІР) |
Нереверсивний |
|
Тахоґенератор |
0...+10 |
1 |
ПІ– реґулювання |
3 |
Позиційний (аналог) |
Реверсивний |
|
Фотоелемент |
|
0,1 |
ПІ– реґулювання |
4 |
Позиційний (аналог) |
Нереверсивний |
-10..+10 |
Тахоґе-нератор |
0...+5 |
0,03 |
І– реґулювання |
5 |
Двигун постійного струму (ШІМ) |
Нереверсивний |
|
Тахоґе-нератор |
0...+10 |
0,05 |
П– реґулювання |
№ вар. |
Тип привода |
Ревер./ неревер. привод |
Діапазон вхідної напруги, В |
Тип датчика зворотнього зв’язку |
Діапазон напруги датчика зворотн. зв’язку, В |
Похибка перетворення зворотного зв’язку, % |
Алгоритм реґулювання |
6 |
Асинхронний двигун (ШІР) |
Реверсивний |
|
Тахоґе-нератор |
-5...+5 |
0,1 |
ПІ– реґулювання |
7 |
Позиційний (аналог) |
Нереверсивний |
0...+10 |
Фотоелемент |
|
0,2 |
І– реґулювання |
8 |
Позиційний (аналог) |
Реверсивний |
|
Тахоґе-нератор |
-5...+5 |
0,08 |
П– реґулювання |
9 |
Двигун постійного струму (ШІМ) |
Реверсивний |
|
Тахоґе-нератор |
0...+5 |
0,03 |
П– реґулювання |
10 |
Асинхронний двигун (ШІР) |
Нереверсивний |
|
Тахоґе-нератор |
0...+10 |
0,05 |
ПІ– реґулювання |
Примітка: комп’ютеризована система повинна видавати цифровий код швидкості (координати) на пристрій програмного керування (ППК) двигуна. Потрібно забезпечити стабілізацію швидкості (досягнення заданої координати) двигуна за допомогою зворотного зв’язку та програмної реалізації заданого алгоритму реґулювання.
Характеристику швидкість-напруга, датчика швидкості, вважати лінійною: діапазон напруги співпадає з діапазоном швидкостей двигуна:
[-Vmax;Vmax] – для реверсивних приводів і [0;Vmax] – для нереверсивних приводів.
Для реверсивних приводів передбачити дві додаткові цифрові лінії SIGN_M і SIGN_M/I (інверсний), що задаватимуть напрямок обертання двигуна.
Варіанти 11-20
Спроектувати комп’ютеризовану систему стеження за n – каналами аналогової інформації.
№ вар. |
Розрядність АЦП |
Кількість каналів |
Макс. частота вх. сиґналу, Гц |
Діапазон зміни вх. сигналу, В |
Параметр, що відстежується |
11 |
8 |
8 |
5000 |
-1,25 - +1,25 |
dUвx/dt |
12 |
12 |
4 |
20 |
0 - +10 |
Uвх |
13 |
10 |
8 |
400 |
-5 - +5 |
dUвx/dt |
14 |
16 |
2 |
20 |
0 - +12 |
Uвх |
15 |
10 |
4 |
1000 |
0 - +10 |
dUвx/dt |
16 |
8 |
2 |
800 |
-5 - +5 |
Uвх |
17 |
16 |
6 |
1000 |
0 - +5 |
dUвx/dt |
18 |
16 |
3 |
10000 |
0 - +12 |
dUвx/dt |
19 |
12 |
5 |
8000 |
-5 - +5 |
Uвх |
20 |
16 |
3 |
2000 |
0 - +10 |
dUвx/dt |
У цих варіантах об’єктом роботи МПС є рівень напруги в n аналогових каналах. Тобто існує декілька аналогових ліній, напруга в яких час від часу змінюється. Проектувальник задає три рівні напруги (два контрольні і один граничний) із діапазону вхідного сиґналу. Завданням мікропроцесорної системи є стеження за всіма лініями, а саме відстеження перевищення трьох визначених проектувальником рівнів напруги в кожному з n - каналів.
В інших варіантах завданням системи є відстеження темпів зміни напруги (dUвх/dt). Проектувальник задає не три рівні напруги, а три максимально припустимих діапазони зміни напруги (кожний наступний більший за попередній). Тобто система стежить за швидкістю зміни напруги.
Таким чином, система повинна працювати в 4 режимах:
а) параметр, що відстежується, не перевищує 1-го порогового значення (Uвх.пор1 ; dUвх/dt пор1) - частота опитування АЦП - fc норм. = fc max/10;
б) параметр, що відстежується, перевищив 1-е порогове значення, але не перевищив 2-е порогове значення (Uвх.пор2 ; dUвх/dt пор2) - частота опитування АЦП - fc1 = fcmax/5 ; додатково видати сиґнал попередження 1 (по цифровій лінії подати напругу на світлодіод 1 i-го каналу);
в) параметр, що відстежується, перевищив 2-е порогове значення, але не перевищив аварійного значення (Uвх.авар.) - частота опитування АЦП максимально можлива - fcmax ; додатково видати сиґнал попередження 2 (по цифровій лінії подати напругу на світлодіод 2 i-го каналу);
г) параметр, що відстежується, перевищив аварійне значення. Видати сиґнал аварії (по цифровій лінії подати напругу на світлодіод 3 i-го каналу) та сиґнал відключення системи.
Вхідний сиґнал поступає в аналоговій формі. Перетворення його в цифровий код виконується за допомогою АЦП, розрядність якого вказана у завданні.
Варіанти 21-34
Спроектувати систему мікропроцесорного синтезатора частоти і функції
№ вар. |
Розрядність ЦАП |
Діапазон зміни частоти вих. сиґналу, Гц |
Діапазон зміни амплітуди, В |
Аналоговий сиґнал, що моделюється |
21 |
8 |
1 - 40 |
0 - 10 |
трикутний |
22 |
12 |
1 - 10 |
-10 - +10 |
sin (wt) |
23 |
10 |
1 - 20 |
0 -10 |
трапецеїдальний |
24 |
12 |
1 - 10 |
0 - 10 |
пилкоподібний |
25 |
10 |
1 - 20 |
-10 - +10 |
cos (wt) |
26 |
16 |
1 - 50 |
0 - 5 |
прямокутний |
27 |
16 |
1 - 30 |
0 - 10 |
пилкоподібний |
28 |
12 |
1 - 40 |
0 - 12 |
прямокутний |
29 |
10 |
1 - 15 |
- 10 - +10 |
пилкоподібний |
30 |
8 |
1 - 25 |
-5 - +5 |
cos (wt) |
31 |
16 |
1 -35 |
-5 - +5 |
sin (wt) |
32 |
12 |
1 -100 |
0 - 10 |
трапецеїдальний |
33 |
10 |
1 - 1000 |
0 -12 |
трапецеїдальний |
34 |
8 |
1 - 500 |
- 10 - +10 |
sin (wt) |
Мікропроцесорний синтезатор частоти і функції - це пристрій, який синтезує (ґенерує) аналоговий сиґнал визначеної форми, частоти та амплітуди.
Користувач задає параметри сиґналу, що ґенерується, за допомогою клавіатури, склад якої визначає самостійно.
Основним елементом блоку перетворення вихідного сигналу буде ЦАП, розрядність якого вказується у завданні.
Візуальний контроль здійснюється за допомогою індикатора, кількість розрядів якого вибирається самостійно. При виборі розрядності необхідно враховувати крок зміни амплітуди або частоти.
Варіанти 35-46
Спроектувати комп’ютеризовану систему термінального пристрою для введення та відображення літерно-цифрової інформації
№ вар. |
Тип індикатора |
Розрядність індикатора |
Спосіб управління індикатором |
Матриця клавіш |
35 |
Вакуумний люмінесцентний (ВЛІ) |
4 |
Статичний |
44 |
36 |
Рідиннокристалічний (РКІ) |
4 |
Статичний |
44 |
37 |
Напівпровідниковий знакосинтезуючий (НПЗСІ) |
8 |
динамічний |
66 |
38 |
НПЗСІ |
4 |
Статичний |
44 |
39 |
НПЗСІ |
12 |
Динамічний |
55 |
40 |
РКІ |
матриця 124 |
динамічний
|
44 |
41 |
РКІ |
248 |
Динамічний |
55 |
42 |
Термінал |
8040 |
контролерний |
1010 |
43 |
РКІ |
248 |
Динамічний |
66 |
44 |
Термінал |
8040 |
контролерний |
88 |
45 |
Термінал |
8040 |
контролерний |
77 |
46 |
Термінал |
8040 |
контролерний |
66 |
Основними елементами даного пристрою, на розробці яких потрібно зосередити увагу, будуть клавіатура та індикатор (відеотермінал).
Клавіатура повинна забезпечувати можливість уводити символи англійського та українського алфавіту, а також арабські цифри. При цьому в завданні накладені обмеження на кількість клавіш, що використовуються. А це значить, що кожній клавіші потрібно надати дві, а то й три функції. Не забороняється також використовувати, наприклад, літеру “А” українського алфавіту, як літеру “А” англійського.
Крім цього, необхідно виконати комплекс заходів із боротьби з так званим ефектом “дрижання” клавіш. Це можуть бути як апаратні, так і програмні способи реалізації.
У завданні також викладені вимоги до індикатора: тип, розрядність та спосіб управління. Якщо в якості індикатора використовується термінал, то в схему потрібно ввести елементи управління відеотерміналом.
З тієї причини, що розрядність індикатора обмежена, а кількість уведеної інформації може бути значно більшою, для отримання можливості перегляду раніше введеної інформації і для запобігання її втрати, передбачити можливість реґенерації (відновлення) такої інформації.
Варіанти 47-56
Проектування інтерфейсу мікропроцесорної системи з програмованим інтервальним таймером.
Усі варіанти цієї теми передбачають використання мікросхеми програмованого інтервального таймера (ПІТ) К580ВИ53. Ця мікросхема дозволяє формувати послідовність імпульсів із точно визначеним часовим інтервалом. Така її властивість надає можливість проектувальнику використовувати ПІТ в усіх схемах, які пов’язані з характеристиками, що змінюються в часі: період, частота, швидкість та ін. Також її можна ефективно використовувати в усіх електронних приладах реєстрації часу.
№ вар. |
Пристрій |
47 |
Годинник добового часу |
48 |
Годинник-таймер |
49 |
Вимірювач періоду прямокутних імпульсів |
50 |
Універсальний ґенератор пилкоподібної напруги |
51 |
Ґенератор швидкості УСАПП зі стандартною низкою швидкостей |
52 |
Вимірювач частоти |
53 |
Перетворювач частота-напруга |
54 |
Універсальний генератор прямокутних імпульсів з Q та t(і), які задаються програмно |
55 |
Секундомір із точністю до 1 мкс. |
56 |
Перетворювач напруга-частота |
Варіанти 57-65
Проектування мікропроцесорної системи вимірювання та відображення цифрових параметрів.
№ вар. |
Параметри, що вимірюються |
Діапазон виміру |
Похибка виміру, % |
Розрядність індикатора |
57 |
Середнє значення струму і напруги |
0,1...10 |
1 |
4 |
58 |
Активна потужність повного струму |
0,1...5000 |
1,5 |
4 |
59 |
Квадрат діючого значення струму |
1...100 |
2 |
4 |
60 |
Квадрат діючого значення напруги |
1...100 |
2,5 |
4 |
61 |
Діюче значення струму |
100...500 |
4 |
4 |
62 |
Діюче значення гармонік напруги |
0,1...10 |
4,5 |
4 |
63 |
Діюче значення гармонік струму |
0,1...10 |
1 |
4 |
64 |
Діюче значення напруги |
10...1000 |
1,5 |
4 |
65 |
Коефіцієнт потужності |
|
2 |
4 |
Примітка: комп’ютеризована система повинна передбачити можливість виведення на індикатор проміжних значень параметрів, що беруть участь у визначенні заданого параметру згідно з варіантом. Значення діапазонів виміру подані в основних фізичних одиницях. Для варіантів, у яких не вказана розрядність індикатора, її необхідно вибрати самостійно, як і тип індикатора в усіх варіантах.
Варіанти 66-73
МПС обробки аналогових сиґналів виконує перетворення вхідного аналогового сиґналу. Процес перетворення повністю контролюється програмою. Вхідний аналоговий сиґнал із визначеним у завданні діапазоном за допомогою блока АЦП перетворюється в послідовність цифрових кодів. Програма виконує обробку цих кодів згідно з типом операції. Для перетворення оброблених цифрових кодів в аналоговий сиґнал використовується блок ЦАП з визначеною у варіанті розрядністю та діапазоном зміни вхідного сиґналу.
Для візуального контролю за результатом обробки у схемі необхідно передбачити можливість підключення до системи осцилографа.
У завданні не вказаний такий важливий параметр вхідного сигналу як частота. Без знання частоти вхідного сиґналу не можливо точно із невеликою похибкою виконати аналогово-цифрове перетворення. Тому проектувальник повинен самостійно визначити цей параметр виходячи з можливостей всієї МПС і блока АЦП зокрема.
№ вар. |
Розрядність АЦП |
Діапазон зміни вх. сиґналу, В |
Операція |
Розрядність ЦАП |
Діапазон зміни вихідного сиґналу, В |
66 |
10 |
-5 - +5 |
віднімання |
8 |
-10 - +10 |
67 |
10 |
0 - +10 |
зсув на 90 |
10 |
0 - +10 |
68 |
8 |
0 - +5 |
додавання |
10 |
0 - +10 |
69 |
8 |
0 - +5 |
підсилення в 2 рази |
10 |
0 - +10 |
70 |
10 |
0 - +5 |
зсув на 30 |
8 |
0 - +5 |
71 |
10 |
0 - +10 |
зсув на 60 |
8 |
0 - +10 |
72 |
12 |
0 - +10 |
інверсія |
10 |
0 - +10 |
73 |
12 |
- 5 - +5 |
випрямлення |
10 |
0 - +5 |
Варіанти 74-80
Спроектувати МПС, що реалізує паралельний канал прийому – передачі даних із корекцією помилок за кодом Хемінга.
№ вар. |
Розрядність коду Хемінга, що передається |
Розрядність коду Хемінга, що приймається |
74 |
8 |
8 |
75 |
6 |
12 |
76 |
8 |
10 |
77 |
10 |
7 |
78 |
12 |
6 |
79 |
11 |
9 |
80 |
9 |
10 |
Примітка: передбачити індикацію корисної інформації, що приймається як у двійковому, так і в десятковому кодах. Передбачити виведення на індикатор коду Хемінга, а також десяткове значення числа, що передається.
СПИСОК ЛІТЕРАТУРИ
Абрайтис В.Б., Седаускас С.Ю., Пятраускас А.В. Микропроцессорный комплект БИС высокого быстродействия К1800 – М.: Радио и связь, 1986 -184с.
Балашов Е.П., Григорьев В.Л., Петров Г.А. Микро- и мини-ЭВМ Л.: Энергоатомиздат, 1984-376с.
Щелкунов Н.Н., Дианов А.П. Микропроцессорные средства и системы М.: Радио и связь. 1989 - 288с.
Вуд А. «Микропроцессоры в вопросах и ответах» - М: Энергоатомиздат, 1985-184с.
Такхайм Р. Микропроцессоры: курс и упражнения – М.: Энергоатомиздат, 1987 – 336с.
Самофолов К.Г. и др. «Микропроцессоры» К: Техника, 1986-278с. (2-е изд. Переработаное и дополненное 1989-312с.).
Певенталь Л. «Введение в микропроцессоры: программное обеспечение, аппаратные средства, программирование» - М: Энергоатомиздат, 1983-464с.
Кофрон Дж., Лонг В. «Расширение микропроцессорных систем» - М: Машиностроение, 1987-320с.
Лихтецендр Б.Я., Кузнецов В.Н. «Микропроцессоры и вычислительные устройства в радиотехнике» - К: Высшая школа, 1988-272с.
Лю Ю-чжен, Гибсон Г. «Микропроцессоры семейства 8086/8088. Архитектура, программирование и проектирование микрокомпьютерных систем» - М: Радио и связь, 1987-288с.
Рафикузман М. «Микропроцессоры и машинное проектирование микропроцессорных систем» в 2-х томах, М: Мир, 1988-312с.
Григорьев В.Л. «Программирование однокристальных микропроцессоров» М: Энергоатомиздат, 1987-288с.
Гуртовцев А.Л., Гудыменко С.В. «Программы для микропроцессоров: справочное пособие» - Мн.Высш. шк., 1989-353с.
Сталин В.В., Урусов А.В. «Проектирование цифровых устройств на однокристальных контроллерах» - М: Энергоатомиздат, 1990-224с.
Додаток А
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
КРЕМЕНЧУЦЬКИЙ ДЕРЖАВНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ
ІНСТИТУТ ЕЛЕКТРОМЕХАНІКИ, ЕЛЕКТРОНІКИ І КОМП’ЮТЕРНИХ ТЕХНОЛОГІЙ
КАФЕДРА “СИСТЕМ АВТОМАТИЧНОГО УПРАВЛІНЯ ТА ЕЛЕКТРОПИВОД”
КУРСОВИЙ ПРОЕКТ
ІЗ НАВЧАЛЬНОЇ ДИСЦИПЛІНИ
“МІКРОПРОЦЕСОНІ ПРИСТРОЇ”
НА ТЕМУ “МІКРОПРОЦЕСОРНА СИСТЕМА ОБРОБКИ
АНАЛОГОВИХ СИҐНАЛІВ”
Виконав студент гр.ЕВ-03-1
І.І.Іванов
Перевірив старш. викладач П.П.Петров
Кременчук 2005
Додаток Б
КРЕМЕНЧУЦЬКИЙ ДЕРЖАВНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ
Кафедра САУЕ Дисципліна Мікропроцесорні пристрої .
Спеціальність 7.092204 - “Електромеханічне обладнання енергоємних виробництв” .
Курс 4 .Група ЕВ-03-01 .Семестр сьомий .