

1. Электромеханические аппараты автоматики, управления, распределительных устройств и релейной защиты
План лекций:
1.4.Аппараты автоматики.
Аппараты автоматики
Они работают на небольших напряжениях (до сотен вольт) и токах (до 5 А) и выполняют функции контроля какого-либо электрического (реле) и неэлектрического (датчики) входного параметра. Когда входной (контролируемый) параметр реле достигнет заданной величины, происходит срабатывание электрического реле и «выдача сигнала» на выходе. Это осуществляется размыканием или замыканием контактов (контактное реле) или резким изменением электрического сопротивления на выходе (бесконтактное реле). То и другое приводит к скачкообразному изменению тока в оперативной цепи, в которую включен выходной элемент. Поэтому кривая зависимости выходного сигнала реле от входного сигнала имеет скачкообразный вид.
В датчиках характер зависимости выходного сигнала от входного имеет плавный вид: малое изменение входного сигнала вызывает пропорциональное небольшое изменение сигнала на выходе.
На рис.1.10 приведена схема электромагнитного реле, контролирующего значение тока нагрузки IНГ в цепи нагрузочного сопротивления ZНГ.

Рис.1.10. Электромагнитное реле тока
Обмотка реле w включена последовательно в цепь контролируемого тока IНГ, ее сопротивление Z0 практически не влияет на величину IНГ, т.к. ZНГ >> Z0. Протекающий по обмотке ток IНГ создает в магнитопроводе магнитный поток Ф, в результате чего возникает электромагнитная сила РЭМ притяжения якоря 2 к магнитопроводу 1. С ростом тока IНГ эта сила возрастает, и при достижении током IНГ критического значения РЭМ оказывается достаточной для преодоления силы возвратной пружины РП. Якорь притягивается, контакты К1 размыкаются и отключают объект управления О1, а контакты К2 замыкаются и включают объект управления О2 под напряжение U1. Когда ток IНГ снизится до определенного значения, электромагнитная сила будет недостаточна для удержания якоря. Под действием силы Рп он перейдет в первоначальное положение и контакты К1 и К2 переключат контакты О1 и О2. Т.о., данное реле осуществляет автоматическое управление объектами нагрузки в зависимости от значения тока IНГ: при небольших его значениях работает объект О1, при повышенных - объект О2.
На электромагнитном принципе работают магнитоуправляемые контактные аппараты. Контакты запаяны в стеклянный баллон с инертным газом для уменьшения воздействия на них окружающей среды, поэтому их называют гермеризированными контактами (герконами).
На рис.1.11 приведена схема геркона.
Рис.1.11. Магнитоуправляемый контакт - геркон
В стеклянном баллоне 3 размещены ферромагнитные пластинки с контактными накладками. При подаче тока в обмотку w возникают магнитный поток Ф и электромагнитная сила, притягивающая пластинки друг к другу. В результате замыкается цепь оперативного тока, подключенная к выводам 1 и 2. Если ток управления с обмотки w снять, то под действием собственных упругих сил контактные пружины разомкнутся и цепь оперативного тока будет разорвана.
На рис. 1.12 приведена схема поляризованного реле на герконе.
Рис.1.12. Магнитоуправляемый контакт – поляризованное реле на герконе
Между ферромагнитными пластинами 2 и 3 размещен постоянный магнит N – S, создающий поляризующий поток Ф1. Направление магнитного потока Ф2 от тока в обмотке w зависит от направления этого тока. При одном его направлении потоки Ф1 и Ф2 будут складываться в нижних зазорах между пластинами 1 и 3 и вычитаться в верхних зазорах между пластинами 1 и 2. В результате сомкнутся контактные пластины 1 и 3. При изменении направления тока в обмотке w изменится направление потока Ф2. В верхнем зазоре между пластинами 1 и 2 будут складываться, в нижнем, между пластинами 1 и 3, - вычитаться. Произойдет замыкание контактов 1 и 2. Т.о., изменение направления (полярности) тока в обмотке управления w вызывает переключение контактов (1 и 2 или 2 и 3). Постоянный магнит N – S должен быть изолирован от контактных пластин 2 и 3 изоляционными прокладками.
Тепловое реле, схема которого приведена на рис.1.13, реагирует на значение тока, протекающего по нагревательному элементу НЭ, который включается в цепь тока IНГ нагрузки.

Рис.1.13. Тепловое реле
Чем больше ток, протекающий через нагревательный элемент, тем больше температура нагрева НЭ, которая сообщается консольно закрепленной биметаллической пластинке 1. Она состоит из двух слоев: металла с высоким температурным коэффициентом линейного расширения α1 и металла с низким коэффициентом α2, причем α1 >> α2. При нагреве пластина 1 изгибается, ее нижний конец переводит верхнюю часть пружины 7 вправо, в результате чего поворачивается коромысло 6 и размыкаются контакты 4 и 5. Упоры 2 и 8 ограничивают перемещение подвижных элементов. Кнопка 3 (с самовозвратом) предназначена для возврата реле в исходное положение после остывания пластины 1.
Существуют также статические реле, не имеющие подвижной системы. В их основу положен принцип сравнения контролируемой величины с эталонной: током, напряжением, мощностью, сдвигом фаз и т.д.
На рис.1.14 приведена схема реле сравнения контролируемого тока с эталонным.
Рис.1.14. Реле сравнения тока
Падение напряжения UНГ на сопротивлении R, создаваемое контролируемым выпрямленным переменным током нагрузки IНГ, сравнивается с эталонным падением напряжения UЭТ. Ток I0, определяемый разностью этих напряжений, поступает на исполнительный орган ИО, срабатывающий только при положительных значениях тока I0. Реле сработает, когда UНГ ≥ UЭТ (IНГ >> IЭТ). Оно не сработает, если UНГ < UЭТ или IНГ < IЭТ, где IЭТ = UЭТ/R.
В качестве исполнительного органа ИО может применяться поляризованное реле. При замыкании контактов ИО подается сигнал на отключающую катушку ОК отключающего аппарата ОА и он обесточивает объект нагрузки ОН. Т.о., это отключение происходит когда ток IНГ в цепи объекта нагрузки превысит заданное значение.
Измерительные органы реле включаются в электрическую схему электрооборудования. Токовые реле реагируют на значение тока, протекающего по обмотке. Реле напряжения срабатывают, если контролируемое напряжение станет выше (реле максимального напряжения) или ниже (реле минимального напряжения) заданного. Реле мощности реагируют на изменение потребляемой мощности, реле направления энергии – на изменение направления потока электрической энергии. В нормальном режиме работы схемы электроснабжения энергия от генератора поступает к приемникам электроэнергии, а при коротком замыкании в генераторе она изменяет направление на противоположное: вращающиеся за счет запасенной кинетической энергии двигатели переходят в генераторный режим и подпитывают место короткого замыкания.
Дистанционные реле сопротивления (активного, реактивного или полного) обладают способностью измерять величину электрического сопротивления от места установки реле до места повреждения в сети, пропорционально расстоянию (дистанции) между ними, и подавать соответствующий сигнал в схему автоматического управления электроустановкой.
В схемах автоматического управления широко распространены реле времени и программные реле. Реле времени имеют возможность создавать регулируемую в широких пределах выдержку времени, отсчитываемую от момента подачи сигнала на вход реле времени до момента срабатывания оперативного органа. Программное реле – это разновидность реле времени с несколькими независимыми контактными группами. Выдержки времени от момента подачи сигнала на вход этого реле до момента замыкания тех или иных контактов различны и могут регулироваться в широких пределах.
Широкое распространение нашли промежуточные (коммутационные) реле, осуществляющие одну из функций:
увеличение количества автономных сигналов на выходе при подаче на вход единичного сигнала (на выходе реле появляется большое количество независимых сигналов). Для этого используется реле, подобное приведенному на рис.1.10: при подаче единичного сигнала тока на обмотку управления w может замыкаться несколько пар контактов, если их выполнить подобно контактам К1 и К2.;
«усиление сигнала». При подаче небольшого тока на обмотку w (рис.1.10), достаточного для срабатывания реле, замыкаются контакты, способные пропустить через себя значительно больший ток по сранению с током входного сигнала.
На рис.1.15 приведена схема релейной защиты объекта нагрузки ОН от недопустимых изменений напряжений питания U и тока нагрузки IНГ.

Рис.1.15. Аппараты в схеме релейной защиты
Реле напряжения Н контролирует значение напряжения U, реле тока Т включено последовательно в цепь и контролирует значение тока IНГ. Если ток или напряжение выйдут за заданные пределы, соответствующее реле (Н или Т) сработает и замкнет свои контакты. Тогда обмотка реле времени В окажется под полным напряжением оперативного источника (« + » или « - »). «Выбрав» необходимую задержку времени, реле времени замкнет свои контакты и подаст «плюс» оперативного источника на обмотку промежуточного реле П. Оно срабатывает и через пару своих контактов подаст напряжение на отключающую катушку ОК аппарата ОА, который отключится и снимет напряжение с объекта нагрузки ОН.
Датчики (первичные преобразователи) осуществляют контроль неэлектрических параметров – угловых и линейных перемещений деталей, давления газов и жидкостей, уровней жидких и сыпучих тел, механических усилий и моментов, скоростей движения и т.д.
На рис.1.16 приведена схема индуктивного датчика давления.
Рис.1.16. Индуктивный датчик давления
С изменением давления Р в резервуаре изменяется воздушный зазор δ между якорем Я и магнитопроводом М магнитной системы электромагнитного устройства. Обмотка w включена на синусоидальное напряжение U. Значение тока i, регистрируемого измерительным органом ИО, зависит от электрического сопротивления обмотки, которое в электромагнитных устройствах является преимущественно индуктивным:
![]()
где L - индуктивность обмотки, равная:
![]()
где Ф – магнитный поток, создаваемый током i.
В простейшем случае
![]()
где Rδ – магнитное сопротивление воздушных зазоров, равное
![]()
где μ0 – магнитная постоянная;
S – площадь полюса на магнитопроводе.
Тогда
![]()
Т.о., по контролируемому току i можно судить о значении давления Р в резервуаре, которому соответствует определенный зазор в магнитной системе.
Если последовательно с обмоткой w включить постоянную емкость С, то при равенстве индуктивного (ХL = ωL) и емкостного (XC = 1/ωC) сопротивлений возникнет резонанс и значение тока резко возрастает. Это позволяет настроить датчик на определенное значение давления в резервуаре, и тогда он может служить в качестве измерительного органа в системе автоматического поддержания заданного уровня давления.
На рис.1.17 приведена схема индукционного датчика, реагирующего на угловые перемещения подвижной системы.
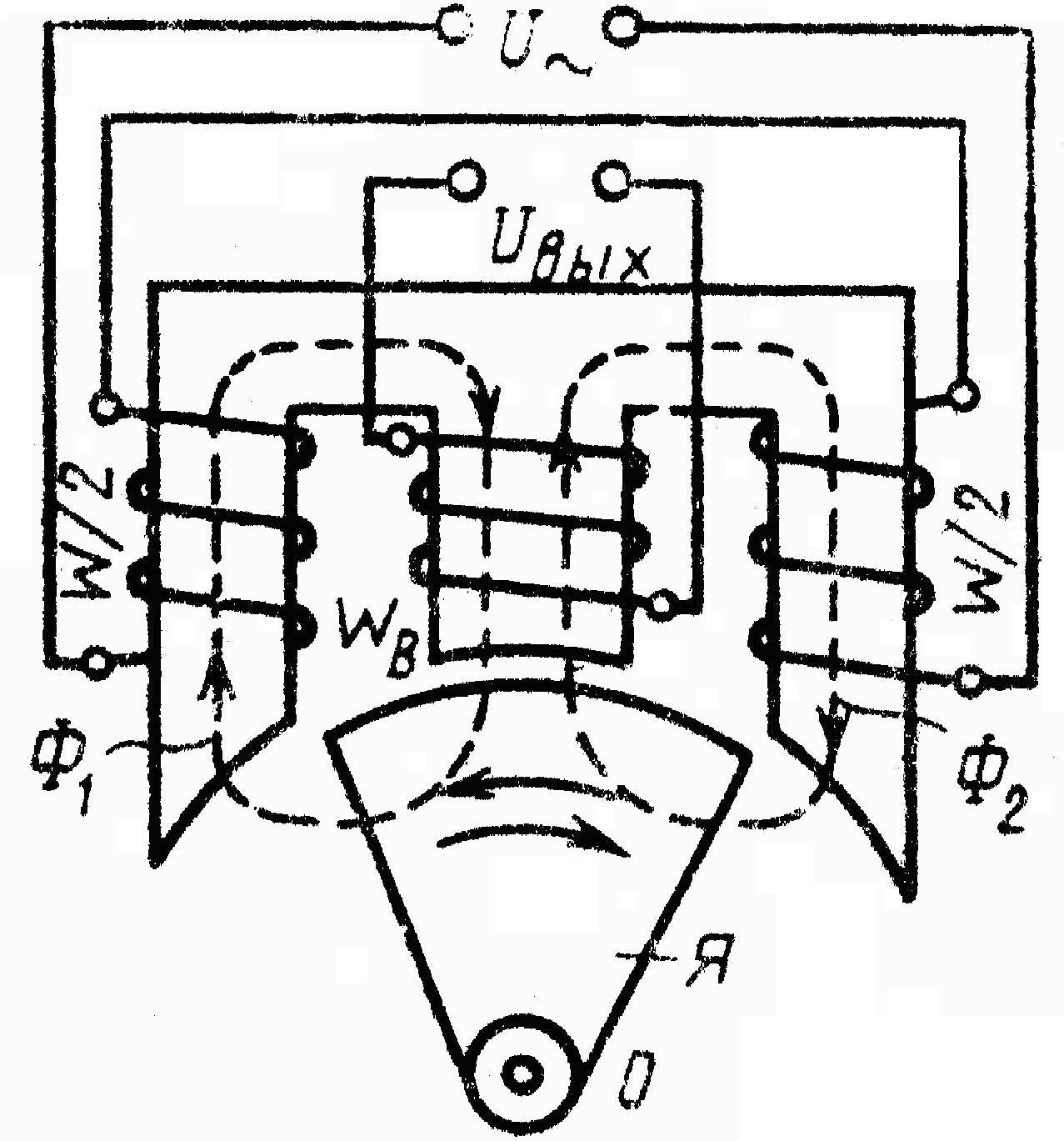
Рис.1.17. Индукционный датчик углового перемещения
На крайних стержнях магнитопровода размещены две половины обмотки w/2, на которую подано напряжение U~ переменного тока высокой частоты. Якорь Я связан с подвижной системой, угловое перемещение которой контролируется датчиком. В нейтральном среднем положении якорь расположен симметрично по отношению к магнитопроводу, тогда магнитные проводимости воздушных зазоров для потоков Ф1 и Ф2 одинаковы. Поэтому потоки Ф1 =Ф2, результирующий поток в среднем стержне равен нулю и ЭДС в выходной обмотке не наводятся.
При угловом перемещении якоря оказываются неодинаковыми магнитные проводимости воздушных зазоров и возникает неравенство потоков Ф1 и Ф2. Магнитный поток в среднем стержне становится отличным от нуля, поэтому в обмотке wВ наведется ЭДС.
Наведенная ЭДС, определяется по закону электромагнитной индукции:
![]()
Для синусоидального
потока
![]() ЭДС равна:
ЭДС равна:
![]()
Учитывая, что
максимальное значение ЭДС Umax
достигается при
![]() и что оно связано с действующим значением
ЭДС U
зависимостью
и что оно связано с действующим значением
ЭДС U
зависимостью
![]()
получим
![]()
В рассматриваемом случае наведенная в обмотке ЭДС равна:
![]()
Чем больше отклонение якоря от нейтрального положения, тем значительнее расхождение в магнитных проводимостях воздушных зазоров и в потоках Ф1 и Ф2 и тем больше наводимая ЭДС в обмотке wВ. Знак ЭДС зависит от того, какой поток (Ф1 или Ф2) больше, а это, в свою очередь, определяется направлением отклонения якоря вправо или влево. Поэтому включение обмотки wВ в фазочувствительную схему позволяет контролировать величину поворота якоря и направление его перемещения.
Емкостные датчики изменяют емкость конденсатора в зависимости от изменения контролируемой величины. Например, если в цилиндрическом конденсаторе часть пространства между цилиндрами заполняется жидкостью, а другая – воздухом, то в зависимости от объема заполнения жидкостью изменяется результирующая емкость конденсатора и его реактивное электрическое сопротивление X = 1/ωC. По изменению этого сопротивления можно судить об уровне жидкости в резервуаре, с которым сообщается емкостный датчик.
Магнитоупругие датчики используют эффект изменения магнитной проницаемости некоторых материалов при появлении в них механических напряжений и деформаций. От магнитной проницаемости магнитопровода, на который намотана обмотка, зависит индуктивное электрическое сопротивление этой обмотки. Если она включена в цепь тока, то изменение магнитной проницаемости при механическом воздействии в устройстве приведет к соответствующему изменению тока.
ЛЕКЦИЯ № 5