

Функции систем тм
Функции систем ТМ - подразделяются на следующие уровни:
а) пользовательские функции: основные и вторичные; основные –это телеконтроль и телеуправление технологическими процессами;
вторичные–производные от основных – определяют возможности системы по обработке и представлению (отображению) информации пользователю. Используются ЭВМ и микропроцессы для обработки информации: суммирование ТИ, указание пределов контролируемых параметров, регистрация с указанием времени, контроль каналов связи и устройств ТМ, формирование графиков и таблиц.
Функции оперативной обработки и отображения данных:
обеспечение заданного интерфейса сигналов входа-выхода между ТМ и контролируемым процессом на КП, а также устройствами ТМ и человеком-оператором на ПУ (ДП), включая фильтрацию входных сигналов от действия помех, дребезга контактов реле и ключей датчиков информации;
формирование сигналов начала передачи;
защита от ошибок датчиков и от помех во входных и выходных цепях УТМ;
сжатие данных на входе и выходе УТМ;
представление сигналов выхода в форме, удобной для отображения на пользовательском уровне (на щите, дисплее, пульте и т.п.).
Функции передачи (транспортировки) сообщений: обеспечение высокой достоверности, малого времени телепередачи, высокой эффективности использования каналов связи в малой полосе.
Для этого осуществляют:
на транспортном уровне - разделение сообщений на блоки, введение короткоформатных блоков для передачи экстренных сообщений;
введение приоритетов передачи и управление этими приоритетами, разделение передаваемых данных по классам обслуживания;
обеспечение резервного пути доставки сообщения при повреждении основного канала;
на канальном уровне:
преобразование входных сигналов от датчиков в последовательность дискретных сигналов, кодирование выходных сигналов по определенному закону для помехозащищенности;
декодирование сигналов, контроль правильности приема, квитирование, синхронизация кадров;
Функции физического уровня определяются видом физической среды, которая служит для передачи сигналов между передающим и приемным устройствами ТМ.
Каналы связи, применяемые в энергетике для систем ТМ:
собственные (Минэнерго) подземные или подвесные кабели связи;
проводные воздушные линии связи;
арендованные телефонные (телеграфные) линии и каналы связи;
радиоканалы УКВ;
ВЧ каналы по высоковольтным ЛЭП (35 кВ и выше)
каналы тональной частоты по силовым распределительным электриче-
ским сетям 10 кВ и ниже;
опто-волоконные линии и т.д.
Типовые структуры систем тм
Телемеханическая система состоит из устройств ТМ, расположенных на диспетчерских и контролируемых пунктах, связанных между собой каналами связи.
Различают ТМ – системы одноуровневые и многоуровневые.
Типовые структуры систем ТМ относятся к одноуровневым системам.
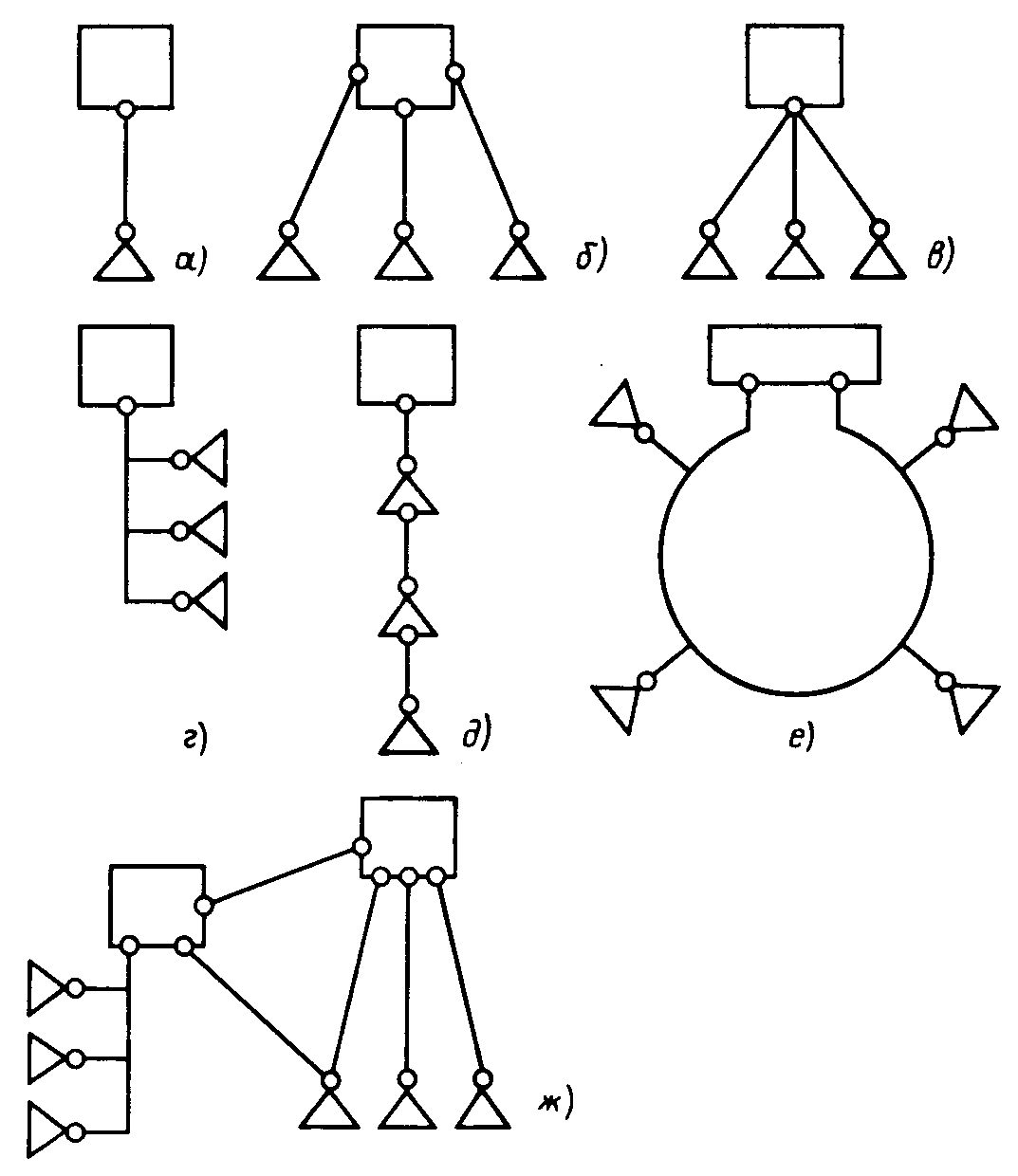
Структуры телемеханических систем:
а – «точка-точка»; б – многоточечная радиальная «один-один»; в – многоточечная радиальная «один-N»; г – многоточечная магистральная; д – цепочечная (транзитная); е – кольцевая; ж – смешанная иерархическая
Различают:
а) «пункт-пункт» («точка-точка»); один ПУ соединен с одним КП выделенным каналом связи (рис. 2.3, а);
б) многоточечная радиальная «один-один»; устройство ПУ, имеющее N линейных терминалов, связано с N КП. Возможен одновременный независимый обмен информацией между ПУ и каждым КП (рис. 2.3, б);
в) многоточечная радиальная «один – N» (звездная); устройство ПУ связано с N устройствами КП через общий линейный терминал, обслуживающий N радиальных каналов связи. Одновременно только один КП может передавать информацию на ПУ. Передача общих команд с ПУ может производиться на все КП одновременно, передача индивидуальных команд – по адресу КП (рис. 2.3, в);
г) многоточечная магистральная; устройство ПУ связано общим каналом связи с N устройствами КП, расположенными вдоль этого канала. Организация связи между ПУ и КП такая же, как для многоточечной радиальной структуры (рис. 2.3, г);
д) цепочечная (транзитная) структура; устройство ПУ связано цепочечным каналом связи с устройствами КП. На КП производится ретрансляция сигналов (рис. 2.3, д);
е) многоточечная кольцевая; общий канал связи образует «кольцо», к которому подключены все устройства КП. Кольцо замыкается устройством ПУ. При повреждении на одном из участков канала работоспособность КП сохраняется, так как связь с каждым из них может быть организована с двух сторон (рис. 2.3, е).
ж) смешанная-иерархическая структура разных типов (рис. 2.3, ж).