

4. Определение угловых скоростей и ускорений звеньев
При исследовании механизма нам необходимо найти абсолютные угловые скорости звеньев. Угловую скорость s-го звена механизма можно рассматривать как сумму переносной и относительной угловых скоростей. Причем роль переносной составляющей играет абсолютная скорость s-1-го звена.
Таким образом
![]() (4.1)
(4.1)
где
![]() -
векторы абсолютной угловой скорости
s-го и s-1-го
звена.
-
векторы абсолютной угловой скорости
s-го и s-1-го
звена.
![]() -
вектор угловой скорости s-го
звена относительно s-1-го.
-
вектор угловой скорости s-го
звена относительно s-1-го.
Спроектировав уравнение (1) на оси системы координат, связанной с s-тым звеном, получаем:
![]() (4.2)
(4.2)
где
![]() -
матрица перехода от s-1-ой
к s-той системе,
-
матрица перехода от s-1-ой
к s-той системе,
Таким образом, формула (2) является рекуррентным соотношением, позволяющим определить угловые скорости всех звеньев шаг за шагом.
Для определения угловых ускорений звеньев продифференцируем по времени угловые скорости звеньев и воспользуемся теоремой о локальной производной. Получим следующие выражения:
![]() (4.3)
(4.3)
где
![]() - проекция вектора угловой скорости
s-1-го звена на оси s-ой
системы координат,
- проекция вектора угловой скорости
s-1-го звена на оси s-ой
системы координат,
![]() -
относительное угловое ускорение.
-
относительное угловое ускорение.
Определим угловые скорости звеньев для промышленно робота:



![]()
![]()
![]()
Определим угловые ускорения звеньев промышленного робота:



![]()
![]()
![]()
5. Определение скоростей точек звеньев
Скорость произвольной точки А в подвижной системе координат может быть определена по формуле:

где
![]() - скорость точки А в подвижной системе
координат,
- скорость точки А в подвижной системе
координат,
![]() - скорость начала координат
- скорость начала координат
![]() - относительная скорость точки А.
- относительная скорость точки А.
Тогда получаем следующее выражение для скорости:
![]()
Поскольку А – произвольно взятая точка, то возьмем ее совпадающей с началом системы координат, связанной с s-1-ым звеном. Тогда получим следующее выражение для скорости начала системы координат, связанной с s-тым звеном.
![]()
Таким образом, зная скорость предыдущей системы координат, можно найти скорость последующей.
Для центров масс скорости могут быть определены по следующей формуле:
![]()
Продифференцировав формулу (3), получим ускорения начала системы координат, связанной с s- тым звеном:

где
![]() - относительное ускорение, которое может
быть получено дифференцированием
относительной скорости,
- относительное ускорение, которое может
быть получено дифференцированием
относительной скорости,
![]() - ускорение Кориолиса.
- ускорение Кориолиса.
Для центров масс звеньев ускорения определяются по следующей формуле:
![]()
Определим скорости точек звеньев:




![]()
![]()




![]()
![]()
![]()
![]()
Определим ускорения точек звеньев:


![]()
![]()
![]()
![]()
![]()
![]()
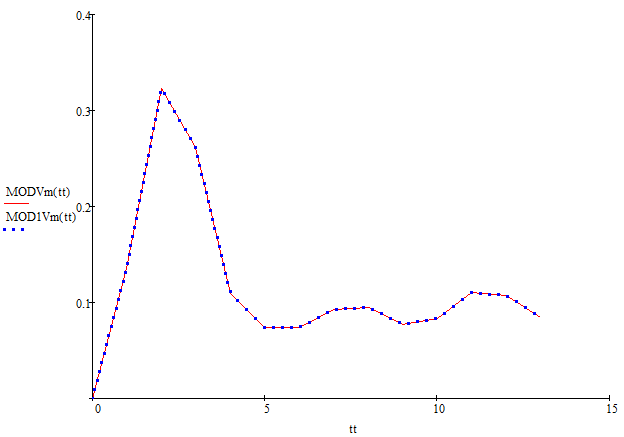
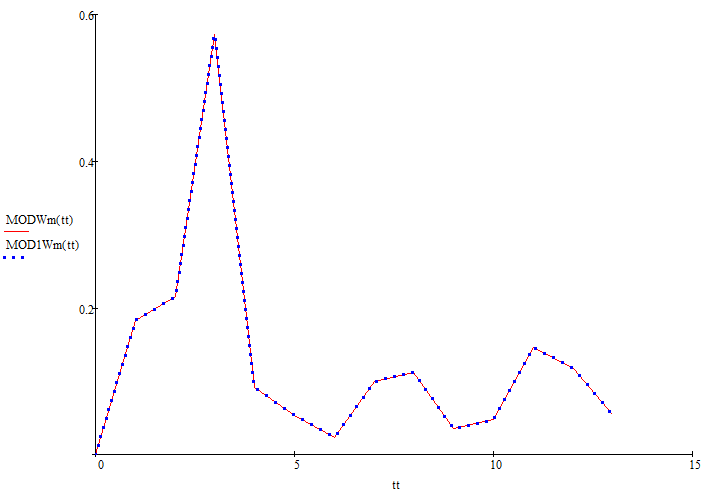
Выполним проверку полученных результатов по уравнению движения полюса схвата:
![]()
![]()
![]()
![]()
6. Кинетостатический расчет механизма
Задача кинетостатического расчета - определить движущие силы и моменты, реакции в кинематических парах. Для силового расчета нам необходимо знать массы звеньев, центры масс звеньев, скорости и ускорения этих центров масс (найдены в предыдущем пункте), тензоры инерции, составленные из осевых и центробежных моментов инерции.
Определим массы звеньев:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Силы тяжести звеньев в нулевой системе координат:



Определим силы инерции, возникающие при движении звеньев:


![]()
![]()
![]()
![]()
![]()
![]()
Моменты инерции звеньев и тензоры инерции в главных осях:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определим моменты инерции, возникающие при движении звеньев:
![]()
![]()
![]()
Разделим звенья механизма для проведения силового расчета.
Рассмотрим 3-е звено:
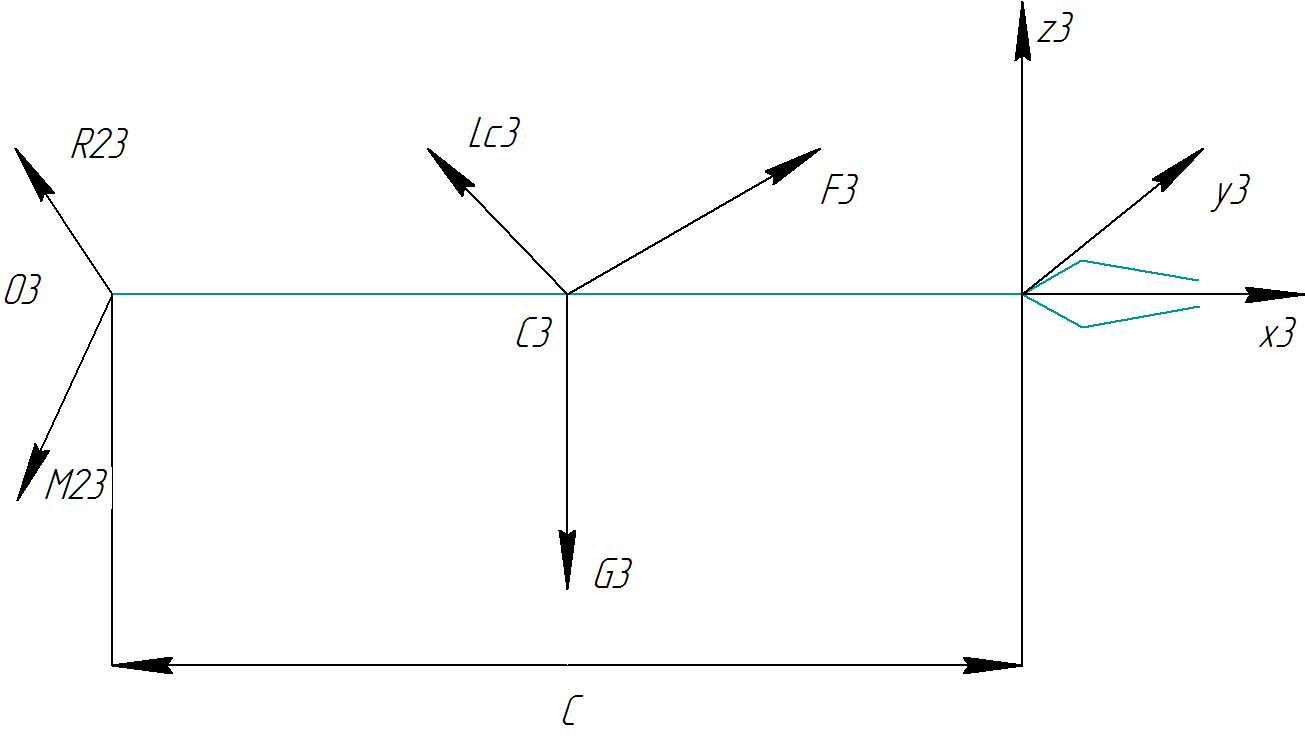
![]()
![]()
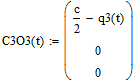
Рассмотрим 2-е звено:
![]()
![]()
![]()


![]()
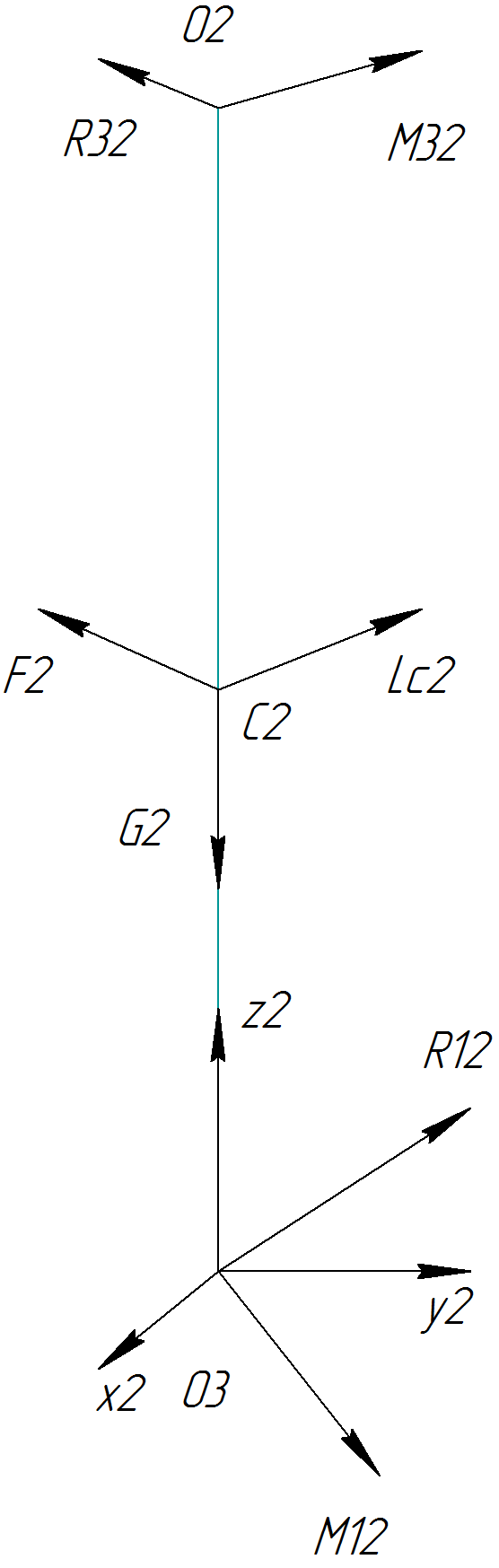
Рассмотрим 1-е звено:
![]()
![]()
![]()


![]()