

Цель работы
Расчет параметров и моделирование двухканальной системы векторного управления АД при его питании от преобразователя частоты средствами программного пакета Matlab.
Задание
1. Изучить принцип работы преобразователя частоты (ПЧ) – автономного инвертора напряжения с широтно-импульсной модуляцией.
2. Рассчитать параметры АД в соответствии с вариантом задания. Исследовать на ЭВМ АД в различных системах координат.
4. Ознакомится со структурной схемой системы векторного управления АД и начертить ее.
5. Рассчитать параметры всех регуляторов.
6. Ввести в ЭВМ модель разработанной системы векторного управления электропривода и исследовать переходные процессы в различных режимах работы.
7. Провести обработку полученных графиков переходных процессов и дать их анализ.
8. Сделать выводы.
Исходные данные
Вариант №4
Тип двигателя K21R 160 M6
Мощность, Р, кВт 5,9
Номинальное напряжение, Uн,B 400
Номинальный ток, Iн, А 12,2
Момент инерции 0,053
Номинальная скорость, nн, об/мин 960
Активное сопротивление статора, Rs, Ом 0,7793
Реактивное сопротивление статора, xsl, Ом 1,237
Активное приведенное сопротивление
ротора
![]() ,
Ом
0,7467
,
Ом
0,7467
Реактивное приведенное сопротивление
рассеяния ротора xrl , Ом 1,53
Главное индуктивное сопротивление, 30,36
![]() ,Ом
,Ом
Содержание
Введение 5
1 Общие теоретические положения 6
1.1 Силовые полупроводниковые приборы 6
1.2 Инвертор напряжения 7
1.3 Математическая модель асинхронного двигателя во вращающейся ортогональной системе координат, ориентированной по потокосцеплению ротора 10
Система координат α, β применяется для анализа систем электропривода с управлением двигательными и тормозными режимами асинхронных машин по цепи статора, в том числе при анализе систем с векторным управлением и для исследования режимов при несимметрии статорных цепей. 18
, (25) 22
Модели d,q, также как и x,y, привязаны к скорости поля статора (или ротора), что ограничивает область их применения только случаями питания статора АД синусоидальнымнапряжением. 23
(27) 23
Таким образом получаем: 23
Рисунок12 - Структурные схемы АД в системах координат d, q 24
2 Расчет параметров двигателя и регуляторов 25
2.1 Расчет параметров двигателя 25
2.2 Расчет регуляторов 28
Заключение 43
Список источников литературы 44
Введение
В последнее время частотно-регулируемый электропривод переменного тока и, прежде всего, асинхронный электропривод стал главным типом регулируемого промышленного электропривода серийно выпускаемого ведущими отечественными и зарубежными электротехническими фирмами.
Основным силовым преобразователем энергии такого электропривода являются полупроводниковые преобразователи частоты на полностью управляемых коммутируемых элементах типа силовых транзисторов (IGВT) и запираемых тиристоров (IGCT).
Если на этапах развития до 80-х годов основным типом преобразователей частоты были преобразователи по схеме «неуправляемый выпрямитель – ШИМ-инвертор», в связи с чем в электроприводе реализовывались, преимущественно, тормозные режимы с рекуперацией энергии на тормозные сопротивления, то в настоящее время развита теория и практика создания электроприводов с активным выпрямителем (или выпрямителем с активным передним фронтом AEFT), обеспечивающим реализацию тормозных режимов с рекуперацией электроэнергии в сеть и управляемым коэффициентом мощности и коэффициентом нелинейных искажений.
С развитием силовой и слаботочной электроники открылись новые возможности замены двигателей постоянного тока, являющихся основным видом двигателя в высокоточных электроприводах, асинхронными двигателями, являющимися значительно более простыми, дешевыми и надежными. Был разработан новый принцип управления АД, основанный на регулировании составляющих isd, isq вектора статорного тока is, направленных по (isd) и перпендикулярно (isq) вектору потокосцепления ротора ψr.Такой метод получил название векторное управление.
1 Общие теоретические положения
1.1 Силовые полупроводниковые приборы
Питание электрических машин переменного тока с изменяемой скоростью вращения осуществляется от устройств, обеспечивающих на своем выходе регулируемую частоту напряжения или тока. При применении полупроводниковой техники полупроводниковые приборы должны включаться и выключаться в определенной последовательности, формируя это выходное напряжение (ток). Ранее в качестве таких приборов использовались тиристоры. Как известно, закрыть уже открытый тиристор можно только подав на его анод отрицательное (по отношению к катоду) напряжение. Для этих целей использовались узлы искусственной коммутации, состоящие, как правило, из тиристоров, конденсаторов, диодов и индуктивностей. Их наличие снижало надежность преобразователей, увеличивало их габариты и стоимость.
Ситуация радикально изменилась в связи с появлением IGBT – транзисторов (Insulated Gate Bipolar Transistor) – устройств, которые можно закрыть по цепи управления. IGBT имеет биполярный транзистор на выходе и полевой на входе. Первый обеспечивает высокие допустимые ток и напряжение, а второй – малые токи управления. В корпус IGBT встроен обратный диод (рис.1), который обеспечивает при необходимости путь протекания тока обратной полярности.
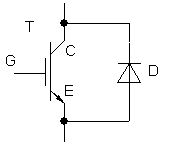
Рисунок 1 – IGBT-транзистор
Для управления IGBT необходимо, как правило, преобразовать логический сигнал управления в напряжение, пригодное для управления IGBT. Это осуществляется с помощью специальных устройств, называемых драйверами, которыми обычно изготовители IGBT комплектуют свои поставки. Помимо указанной, драйверы решают такие задачи: трансформаторное или оптическое потенциальное разделение цепей управления и силовых, защиту IGBT от перегрузок и коротких замыканий, ограничение скорости нарастания анодного тока, реализацию необходимых задержек при включении – выключении IGBT в одной фазе инвертора (для исключения сквозных токов необходимо сначала выключить транзистор, выходящий из работы, а затем включить вступающий в работу, эта задержка составляет несколько мксек.), индикацию состояния драйвера и транзистора. Возможная блок-схема драйвера приведена на рис.2.
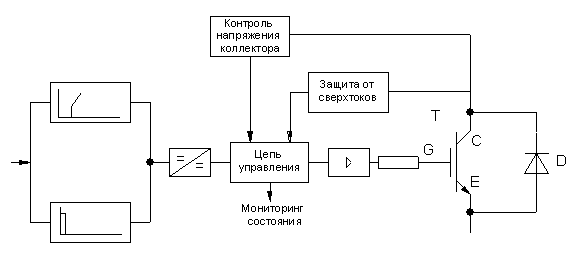
Рисунок 2 – Схема драйвера