

2.8 Равновесие твердого тела
Для равновесия твердого тела в пространстве, находящегося под действием произвольной системы сил, необходимо и достаточно, чтобы главный вектор и главный момент были равны нулю.
![]() ,
,
![]() (2.15)
(2.15)
Записывая эти два векторных равенства в проекциях на оси координат, т.е. учитывая выражения (2.11) и (2.12), получим систему из шести уравнений равновесия.
![]()
![]()
![]()
![]() (2.16)
(2.16)
![]()
![]()
Частные случаи
1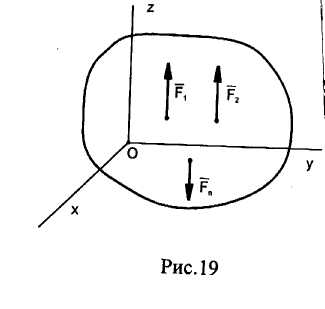 Равновесие пространственной системы
параллельных сил. Пусть эти силы
параллельны оси z.
В этом случае очевидно (рис.19), что первые
два и последнее уравнения (2.16) тождественно
равны нулю, поэтому исключаются из
рассмотрения. Уравнения равновесия
имеют вид:
Равновесие пространственной системы
параллельных сил. Пусть эти силы
параллельны оси z.
В этом случае очевидно (рис.19), что первые
два и последнее уравнения (2.16) тождественно
равны нулю, поэтому исключаются из
рассмотрения. Уравнения равновесия
имеют вид:
![]()
(2.17)
Рис. 19
2 Сходящиеся силы. Необходимым и достаточным условием равновесия этой системы сил является равенство нулю её равнодействующей . Тогда в соответствии с формулами (2.14) уравнения равновесия приобретают форму:
![]() ,
,
![]() ,
(2.18)
,
(2.18)
![]() .
.
3 Плоская система сил. В этом случае необходимыми и достаточными условиями равновесия являются
![]() ,
Мо
= 0 (2.19)
,
Мо
= 0 (2.19)
Уравнения равновесия для плоской системы сил можно записать в трех формах:
а) первая формула непосредственно связана с условиями (2.19). С учетом выражений (2.14) можно записать
,
, (2.20)
![]() .
.
б) вторая форма уравнений равновесия получается, если одно из двух уравнений проекций в выражении (2.20) заменить уравнением моментов относительно точки, отличной от полюса A.
,
, (2.21)
![]() .
.
При этом на рисунках, чертежах прямая AB, соединяющая эти два полюса не должна быть перпендикулярна оси x.
в) третья форма уравнений равновесия связана с заменой обоих уравнений проекций уравнениями моментов.
,
, (2.22)
![]() .
.
Точки A, B, C не должны лежать на одной прямой.
Отметим ещё два простейших случая:
1) в случае плоской системы сходящихся сил уравнение равновесия имеет вид
![]() (2.20)
(2.20)
2) в случае плоской системы параллельных сил
(2.20)
В последнем случае упрощение уравнений равновесия достигается надлежащим выбором системы координат – одну из осей координат направляют параллельно рассматриваемым силам (рис.20).

Р
Рис. 20
Здесь же сформулируем теорему Вариньона, которая часто используется при решении задач о равновесии.
Если система сил имеет равнодействующую, то векторный момент этой равнодействующей относительно произвольно выбранного центра равен сумме векторных моментов всех сил системы относительно того же центра.
![]() (2.23)
(2.23)
Теорема справедлива также для моментов сил относительно произвольно выбранной оси
![]() (2.24)
(2.24)
и для моментов плоской системы сил относительно произвольно выбранного полюса
(2.25)